แนวคิดดั้งเดิม
การวิเคราะห์ตลาดโลกสำหรับบริการส่งยานอวกาศแสดงให้เห็นว่าขณะนี้มีความต้องการอย่างมากในการปล่อยยานอวกาศขึ้นสู่วงโคจรค้างฟ้า (ระนาบวงโคจรเกิดขึ้นพร้อมกับระนาบเส้นศูนย์สูตร ระดับความสูงเหนือพื้นผิวโลกคือ 35,800 กม.) คาดว่าสถานการณ์เช่นนี้จะดำเนินต่อไปในอนาคต อย่างไรก็ตามการสกัดหมายถึงการใช้มี โอกาสที่จำกัดไม่ตอบสนองผู้มีโอกาสเป็นลูกค้าเนื่องจากต้นทุนหรือคุณภาพของบริการที่มีให้
วิธีหนึ่งในการเพิ่มประสิทธิภาพของยานพาหนะส่งดาวเทียมที่ส่งดาวเทียมขึ้นสู่วงโคจรค้างฟ้าและลดต้นทุนในการส่งมอบดังกล่าวคือการเปิดตัวจากเขตเส้นศูนย์สูตร สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าในระหว่างการปล่อยดังกล่าว เช่น จาก Baikonur Cosmodrome ซึ่งตั้งอยู่ที่ละติจูด 46 องศา จำเป็นต้องดำเนินการซ้อมรบวงโคจรพิเศษด้วยต้นทุนพลังงานสูงเพื่อเปลี่ยนเครื่องบินปล่อยจรวดให้เป็นระนาบเส้นศูนย์สูตร นอกจากนี้ ยิ่งท่าอวกาศอยู่ห่างจากเส้นศูนย์สูตรมากเท่าใด ผลกระทบของการหมุนของโลกก็จะน้อยลงเท่านั้น ผลก็คือ เมื่อยานส่งเซนิตเมื่อถูกปล่อยจากบริเวณเส้นศูนย์สูตร จะสามารถปล่อยยานเข้าสู่วงโคจรค้างฟ้าบนยานอวกาศที่มีมวลมากกว่าสองเท่าของการปล่อยจากไบโคนูร์
การก่อสร้างคอสโมโดรมในอาณาเขตของประเทศที่ตั้งอยู่ในเขตเส้นศูนย์สูตรเป็นปัญหาอย่างมากสำหรับรัสเซีย นอกจากนี้ การดำเนินงานจะต้องมีค่าใช้จ่ายสำหรับการจำหน่ายที่ดินทั้งสำหรับการก่อสร้างจุดเริ่มต้นและศูนย์เทคนิคที่มีเขตความปลอดภัยที่จำเป็นและสำหรับ พื้นที่ตกของขั้นที่ถอดออกได้ของยานปล่อยยานและยานอวกาศแฟริ่งแฟริ่ง ควรคำนึงด้วยว่าจำนวนเส้นทางการปล่อยตัวถูกจำกัดอย่างมีนัยสำคัญโดยตำแหน่งของพื้นที่ที่มีประชากรหนาแน่น การบำรุงรักษาท่าจอดอวกาศที่ตั้งอยู่ในพื้นที่ไม่มีคนอาศัยจำเป็นต้องสร้างและบำรุงรักษาโครงสร้างพื้นฐานแบบแยกย่อยที่เหมาะสม นั่นคือเหตุผลที่เกิดแนวคิดในการสร้างจรวดลอยน้ำและอวกาศที่ซับซ้อน
หนึ่งใน ปัจจัยที่สำคัญที่สุดซึ่งถูกนำมาพิจารณาเมื่อสร้างแนวคิดของ Sea Launch Complex เป็นประสบการณ์ที่กว้างขวางของวิสาหกิจรัสเซียและยูเครนในการพัฒนาการผลิตและการดำเนินงานของยานยิงที่ทันสมัยและราคาไม่แพงนักและระบบยิงจรวดและความจริงที่ว่าการผลิต ประมาณ 80% ของยานอวกาศเชิงพาณิชย์กระจุกตัวอยู่ในสหรัฐอเมริกา แนวคิดที่นำมาใช้ในการสร้างจรวดและอวกาศเชิงแข่งขันใหม่ประกอบด้วยข้อกำหนดหลักดังต่อไปนี้:
- การใช้ยานพาหนะปล่อยขีปนาวุธสมัยใหม่ เทคโนโลยีการผลิต ส่วนประกอบของระบบขีปนาวุธ และอุปกรณ์ควบคุมการบินที่พัฒนาในรัสเซียและยูเครน
— ความเป็นอิสระของการเปิดตัวและคอมเพล็กซ์ทางเทคนิคที่รับรองการเตรียมและการเปิดตัวของยานปล่อยโดยใช้ทรัพย์สินทางทะเลเคลื่อนที่
— การปล่อยจากน่านน้ำมหาสมุทร รวมถึงจากพื้นที่ใกล้เส้นศูนย์สูตร
- การเตรียมยานอวกาศสำหรับการเปิดตัวในสหรัฐอเมริกาซึ่งตั้งอยู่ใกล้กับผู้ผลิตยานอวกาศเชิงพาณิชย์หลัก สร้างสภาพการทำงานที่สะดวกสบายให้กับลูกค้า
— รับประกันเวลาที่สั้นที่สุดที่เป็นไปได้สำหรับการสร้างคอมเพล็กซ์การคืนทุนของโครงการผ่านการให้บริการส่งยานอวกาศเป็นเวลาไม่เกิน 5 - 7 ปี
ลักษณะสำคัญ
มวลของยานอวกาศที่ปล่อย (รวมถึงมวลขององค์ประกอบโครงสร้างเฉพาะกาลระหว่างชั้นบนหรือยานปล่อยและยานอวกาศ) คือ:
- สู่วงโคจรค้างฟ้า - มากถึง 2.9 ตัน
— ไปยังวงโคจรการถ่ายโอนทางภูมิศาสตร์ — มากถึง 6.0 ตัน;
— สู่วงโคจรโลกระดับต่ำโดยมีความเอียง 0-90 องศา — 11-15 ตัน
จำนวนการเปิดตัวต่อปีสูงถึง 8
ระยะเวลาในการเปิดตัวนับจากการสรุปสัญญากับลูกค้ายานอวกาศนั้นไม่เกิน 18 เดือน
ความน่าจะเป็นของการทำงานโดยปราศจากความล้มเหลวของยานปล่อยคืออย่างน้อย 0.95
พิกัดพื้นที่ปล่อยตัวหลักอยู่ที่ 0 องศา ซ., 152 องศา. ว.ดี.
ส่วนประกอบของคอมเพล็กซ์
จรวด Sea Launch และศูนย์อวกาศสามารถจินตนาการตามอัตภาพได้ว่าประกอบด้วยสามส่วน ได้แก่ จรวด ยานอวกาศ และทางทะเล
ส่วนขีปนาวุธประกอบด้วย:
- รถปล่อย Zenit-2S และ DM-SL ระยะบน
— คอมเพล็กซ์ของอุปกรณ์และระบบเทคโนโลยีสำหรับการเตรียมและการปล่อยจรวดอวกาศ
— ความซับซ้อนของระบบการเตรียมการและการควบคุมการเปิดตัวอัตโนมัติ
— ระบบอัตโนมัติการควบคุมการบินของเวทีบนด้วยวิธีดึงดูด
— การวัดที่ซับซ้อน
– คอมเพล็กซ์ชายฝั่ง
ส่วนยานอวกาศประกอบด้วยบล็อกน้ำหนักบรรทุกพร้อมยานอวกาศและท่าเรือฐาน ส่วนงานนอกชายฝั่งประกอบด้วยแท่นปล่อยตัวและเรือประกอบและเรือบังคับบัญชา
เปิดตัวรถยนต์ "Zenit-2S"รถส่งยานอวกาศ Zenit แบบสองขั้นตอน (ผู้พัฒนาหลักคือ Yuzhnoye Design Bureau ซึ่งตั้งชื่อตาม M.K. Yangel ผู้ผลิตคือ Yuzhmashzavod Production Association, Dnepropetrovsk) และอาคารภาคพื้นดินของรถทำหน้าที่เป็นพื้นฐานสำหรับโครงการปล่อยเรือในทะเล ตั้งแต่ปี 1985 เป็นต้นมา มีการปล่อยยานพาหนะส่งก๊าซเหล่านี้ 26 ครั้งจาก Baikonur Cosmodrome เซนิต (รูปที่ 1) เป็นยานพาหนะปล่อยจรวดสมัยใหม่ ซึ่งโดดเด่นด้วยความสะดวกในการใช้งานและระบบอัตโนมัติที่สมบูรณ์ของกระบวนการเตรียมและการปล่อยตัว เมื่อคำนึงถึงลักษณะเฉพาะของการปล่อยในทะเล แต่ละระบบและช่องต่างๆ ของยานปล่อยนั้นได้รับการปรับเปลี่ยนหรือแก้ไข ซึ่งเป็นผลมาจากการที่ได้ชื่อว่า "Zenit-2S"
บล็อกเร่งความเร็ว DM-SL DM ชั้นบน (ผู้พัฒนาหลักและผู้ผลิต RSC Energia ตั้งชื่อตาม S.P. Korolev) ถูกนำมาใช้กันอย่างแพร่หลายร่วมกับยานปล่อยโปรตอนเพื่อส่งยานอวกาศขึ้นสู่วงโคจรพลังงานสูง รวมถึงวงโคจรค้างฟ้า บล็อก (รูปที่ 2) สำหรับการซ้อมรบในวงโคจรมีความสามารถในการเปิดเครื่องยนต์ขับเคลื่อนได้หลายครั้ง และโดดเด่นด้วยความน่าเชื่อถือที่ได้รับการพิสูจน์แล้วในระดับสูง เพื่อปรับให้เข้ากับยานปล่อยของเซนิต เช่นเดียวกับการพิจารณาลักษณะเฉพาะของการปล่อยในทะเล ระบบแต่ละระบบและส่วนต่าง ๆ ของเวทีด้านบนได้รับการปรับเปลี่ยนหรือแก้ไข ในเรื่องนี้บล็อกได้รับดัชนี DM-SL
บล็อกเพย์โหลด บล็อกน้ำหนักบรรทุกได้รับการพัฒนาโดยบริษัท Boeing Commercial Space และมีไว้สำหรับการติดตั้งยานอวกาศ บล็อกจะถูกผลิตขึ้นโดยคำนึงถึงการใช้งาน เทคโนโลยีล่าสุดและประกอบด้วยแฟริ่งคาร์บอนไฟเบอร์ องค์ประกอบโครงสร้างเปลี่ยนผ่านระหว่างยานอวกาศและส่วนบนของ DM-SL ระบบไฟฟ้า และระบบควบคุมอุณหภูมิ เส้นผ่านศูนย์กลางของมันคือ 4.15 ม. ความยาวเมื่อปล่อยยานอวกาศหนึ่งลำคือ 11.39 ม. และเมื่อปล่อยยานอวกาศสองลำจะมีความยาว 16 ม.
แพลตฟอร์มเริ่มต้นเพื่อรองรับการปล่อยจรวดอวกาศ Kvarner กำลังปรับเปลี่ยนแพลตฟอร์มนอกชายฝั่งที่สร้างขึ้นเพื่อการผลิตน้ำมัน แพลตฟอร์มดังกล่าวเป็นแบบขับเคลื่อนในตัว, กึ่งดำน้ำ, ประเภทเรือคาตามารัน (รูปที่ 3) ลักษณะหลัก: การกระจัด (กำลังดำเนินการ) - 27,300 ตัน, ความเร็ว - สูงสุด 12 นอต, ความยาว - 133 ม. ความกว้าง - 75 ม. ความสูง (สูงสุด ดาดฟ้าหลัก) - 42 ม.
แพลตฟอร์มดังกล่าวซึ่งเป็นศูนย์ปล่อยจรวดลอยน้ำ ติดตั้งแท่นปล่อยจรวด อุปกรณ์ติดตั้งยานปล่อย ระบบเติมเชื้อเพลิงพร้อมส่วนประกอบเชื้อเพลิง และระบบอื่นๆ ที่รับประกันการเตรียมและปล่อยจรวดอวกาศ แท่นขุดเจาะดังกล่าวติดตั้งระบบและอุปกรณ์ส่วนขีปนาวุธที่อู่ต่อเรือของรัสเซีย
 ประกอบและสั่งการเรือเมื่อสร้างเรือประกอบและเรือบังคับบัญชา จะใช้การออกแบบเรือบรรทุกสินค้า Ro-Ro (ม้วนขึ้นลง) ผู้พัฒนาและผู้ผลิตหลักคือ Kvarner ลักษณะหลัก: การกระจัด - 30800 ตัน, ความเร็ว - สูงสุด 16 นอต, ความยาว - 200 ม., ความกว้าง - 32 ม.
ประกอบและสั่งการเรือเมื่อสร้างเรือประกอบและเรือบังคับบัญชา จะใช้การออกแบบเรือบรรทุกสินค้า Ro-Ro (ม้วนขึ้นลง) ผู้พัฒนาและผู้ผลิตหลักคือ Kvarner ลักษณะหลัก: การกระจัด - 30800 ตัน, ความเร็ว - สูงสุด 16 นอต, ความยาว - 200 ม., ความกว้าง - 32 ม.
เรือประกอบและเรือบังคับบัญชาทำหน้าที่ของ: ความซับซ้อนทางเทคนิค (การทดสอบที่ครอบคลุมของยานปล่อยและระยะบน, การประกอบจรวดอวกาศ); ปั๊มน้ำมัน (เติมเชื้อเพลิงชั้นบนด้วยส่วนประกอบเชื้อเพลิงและก๊าซที่มีจุดเดือดสูง) ศูนย์ควบคุมการเตรียมและปล่อยจรวดอวกาศ การควบคุมการบินของเวทีบน ศูนย์รับและประมวลผลการวัด เรือลำนี้ติดตั้งระบบและอุปกรณ์ส่วนขีปนาวุธที่อู่ต่อเรือของรัสเซีย
เรือประกอบและบังคับบัญชาสามารถรองรับลูกเรือและบุคลากรได้มากถึง 240 คนที่เกี่ยวข้องกับการเตรียมการและการดำเนินการปล่อยเรือรวมถึงตัวแทนลูกค้าและสร้างสภาพความเป็นอยู่เช่นเดียวกับบนเรือสำราญ (มีห้องโดยสารเดี่ยว - ห้องคู่, ห้องประชุม, โรงละคร , ห้องนั่งเล่น, โรงอาหาร, ห้องเล่นเกม, ห้องออกกำลังกาย, สระว่ายน้ำ)
ชายฝั่งทะเลที่ซับซ้อนอาคารบนบกกำลังถูกสร้างขึ้นบนพื้นฐานของ RSC Energia สาขา Primorsky และจะต้องรับประกันการรับ การจัดเก็บ และการบรรทุก (ที่ท่าเรือต้นทาง) ไปยังเรือบรรทุกของระยะยานปล่อย Zenit-2S และระยะบน ตลอดจนส่วนประกอบเชื้อเพลิงที่ผลิตในรัสเซีย
พอร์ตฐานท่าเรือฐานตั้งอยู่ในลองบีช (พื้นที่ลอสแอนเจลิส สหรัฐอเมริกา) จุดประสงค์คือเพื่อให้แน่ใจว่ามีการเตรียมยานอวกาศ การจอดเรือของแท่นปล่อยและชุดประกอบและเรือควบคุม การเติมเชื้อเพลิงส่วนประกอบเชื้อเพลิงและก๊าซ การโหลดระยะยานปล่อย ระยะบน และบล็อกน้ำหนักบรรทุกเข้าสู่ชุดประกอบและ เรือบัญชาการ
การดำเนินงานขั้นพื้นฐาน
ขั้นตอนการผลิตของยานปล่อย Zenit-2S และระยะบน (2-3 ชุดและเชื้อเพลิงสำหรับยานปล่อยที่ผลิตในรัสเซีย (น้ำมันก๊าด) จะถูกส่งไปยังท่าเรือต้นทางบรรทุกบนเรือขนส่งเช่าเหมาลำและขนส่งไปยังท่าเรือฐาน . ระยะเวลาขนส่งประมาณหนึ่งเดือน
ที่ท่าเรือฐาน ยานอวกาศจะถูกตรวจสอบในสถานที่พิเศษ เติมเชื้อเพลิงด้วยส่วนประกอบของจรวดและก๊าซ และติดตั้งไว้ในบล็อกน้ำหนักบรรทุก จากนั้นระบบและอุปกรณ์ที่อยู่บนแท่นปล่อยตัวและชุดประกอบและเรือบังคับบัญชาจะถูกเตรียมไว้สำหรับงานเตรียมการและก่อนการปล่อยตัว ตู้คอนเทนเนอร์และกระบอกสูบจะถูกเติมด้วยส่วนประกอบเชื้อเพลิงและก๊าซที่เหมาะสม ขั้นตอนของยานปล่อย ระยะบน และบล็อกน้ำหนักบรรทุกพร้อมยานอวกาศจะถูกส่งไปยังชุดประกอบและเรือบังคับบัญชา ที่นั่น มีการทดสอบที่ซับซ้อนของยานปล่อยจรวดและบนเวทีด้านบน การเติมเชื้อเพลิงที่เวทีด้านบนด้วยส่วนประกอบจรวดและก๊าซที่มีจุดเดือดสูง การเทียบท่าของเวทีด้านบน และบล็อกน้ำหนักบรรทุกกับยานปล่อย จรวดอวกาศที่ประกอบแล้ว (เรียกว่า "Zenit-3SL") จะถูกบรรทุกจากชุดประกอบและเรือควบคุมไปยังโรงเก็บเครื่องบินบนแท่นปล่อย
แท่นยิงพร้อมยานยิง Zenit-3SL และชุดประกอบและเรือควบคุมจะเคลื่อนไปยังพื้นที่ที่กำหนดของมหาสมุทรเพื่อทำการยิง
หากกำหนดการเริ่มต้นจากพื้นที่หลักที่เส้นศูนย์สูตร (152 องศาตะวันตก) เวลาในการเปลี่ยนไปสู่จุดนั้นคือ 11 วัน
ในพื้นที่ปล่อยจรวด แท่นปล่อยจรวดจะอยู่ในสถานะกึ่งจมอยู่ใต้น้ำ ผู้ติดตั้งจะนำยานปล่อยออกจากโรงเก็บเครื่องบิน และติดตั้งบนแท่นปล่อยจรวด ระบบที่ตั้งอยู่บนแท่นปล่อยจรวดและชุดประกอบและเรือควบคุมกำลังถูกเตรียมสำหรับปฏิบัติการก่อนการปล่อยตัวและการปล่อยตัว การตรวจสอบการควบคุมยานปล่อยตัว ส่วนบนสุด และยานอวกาศ กำลังดำเนินการ บุคลากรและลูกเรือทั้งหมดจากแท่นปล่อยจรวดจะถูกอพยพไปยังเรือประกอบและบังคับบัญชาที่อยู่ห่างจากจุดปล่อยจรวด 5 กิโลเมตร และดำเนินการติดตามและควบคุมเพิ่มเติมผ่านการสื่อสารทางวิทยุ รถปล่อยและเวทีด้านบนได้รับการเติมเชื้อเพลิงแล้ว และรถปล่อยจะถูกปล่อยโดยอัตโนมัติ
เพื่อให้แน่ใจว่าการส่งข้อมูลการวัดและการควบคุมการบิน ณ จุดปล่อยตัว เรือรัสเซีย (จุดวัดลอยตัว) "Selena-M", ศูนย์ควบคุมภารกิจภูมิภาคมอสโก และจุดตรวจวัดภาคพื้นดินในรัสเซียและคาซัคสถานจะมีส่วนร่วม
ผู้เข้าร่วมโครงการหลัก.
การสร้างคอมเพล็กซ์ Sea Launch และการดำเนินงานนั้นคาดว่าจะดำเนินการในเชิงพาณิชย์ โดยไม่ต้องดึงดูดทรัพยากรทางการเงินสาธารณะ แต่อยู่ภายใต้การควบคุมและการสนับสนุนจากหน่วยงานของรัฐอย่างแน่นอน ประการแรก ได้แก่ องค์การอวกาศรัสเซียและกระทรวงอุตสาหกรรมกลาโหม องค์การอวกาศแห่งชาติของยูเครน และกระทรวงการขนส่งอวกาศเชิงพาณิชย์ของสหรัฐอเมริกา
บริษัทร่วมทุน Sea Launch (Sea Launch) ผู้ก่อตั้งคือบริษัทเครื่องบินและอวกาศของอเมริกาอย่าง Boeing, Russian Rocket and Space Corporation Energia กำลังทำงานในการดำเนินโครงการนี้ S.P. Korolev บริษัทต่อเรือที่ใหญ่ที่สุดในยุโรป - บริษัท Kvarner ของนอร์เวย์ ซึ่งเป็นองค์กรการบินและอวกาศชั้นนำของยูเครน PA Yuzhmashzavod และ Yuzhnoye Design Bureau ตั้งชื่อตาม เอ็ม.เค. แยงเกิล.
บริษัทโบอิ้งมีหน้าที่รับผิดชอบในการสร้างหน่วยน้ำหนักบรรทุกและพอร์ตฐาน และดูแลให้มีปฏิสัมพันธ์กับลูกค้าและผู้พัฒนายานอวกาศ RSC Energia, สำนักออกแบบ Yuzhnoye และองค์กรที่เกี่ยวข้องจากรัสเซียและยูเครนรับประกันการผลิตส่วนจรวด Kvarner กำลังปรับเปลี่ยนแท่นปล่อยจรวดและสร้างชุดประกอบและเรือควบคุม บริษัท Boeing และ Kvarner ไม่เพียงแต่ทำหน้าที่เป็นผู้เข้าร่วมเท่านั้น แต่ยังเป็นนักลงทุนในโครงการอีกด้วย การดำเนินโครงการนวัตกรรมนี้จะได้รับการสนับสนุนจากธนาคารโลก ธนาคารระหว่างประเทศเพื่อการบูรณะและพัฒนา และธนาคารพาณิชย์รายใหญ่หลายแห่ง
การเปิดตัวครั้งแรกมีการวางแผนในปี 1998 อำนาจและประสบการณ์ของผู้เข้าร่วมโครงการ Sea Launch ความคิดริเริ่มของแนวคิด ตลอดจนการใช้งานอย่างกว้างขวางของการออกแบบจรวดและเทคโนโลยีอวกาศและการต่อเรือที่ได้รับการพิสูจน์แล้วและพิสูจน์แล้วอย่างกว้างขวางเป็นกุญแจสู่ความสำเร็จ
26 ธันวาคม 2539 14:52 น. หมวดหมู่ , เข้าชม: 1324-- [ หน้า 1 ] --
โฟโดรอฟ อเล็กเซย์ วลาดิมิโรวิช
พื้นฐานของอุปกรณ์จรวดอวกาศ
คอมเพล็กซ์
บทช่วยสอน
การแนะนำ................................................. ....... ........................................... ................ ................ 5
ส่วนที่ 1 พื้นฐานของการก่อสร้างจรวดอวกาศ
คอมเพล็กซ์................................................. ........ .......................................... ........ 7 ข้อมูลพื้นฐานเกี่ยวกับระบบอวกาศ
1 โครงสร้างของระบบอวกาศและคอมเพล็กซ์อวกาศ........................................ .......................... .......................... ................................ .......... 7 1.1 โครงสร้างของระบบอวกาศ .................................................. . ............................... 7 1.2 ระบบการสื่อสารอวกาศ.............. .... ........................................... .......... ............ 1.3 ระบบนำทางในอวกาศ........... .......... .......................... 1.4 ระบบสภาพอากาศในอวกาศ......... ............................... ......................... .... 1.5 ระบบเตือนการโจมตีด้วยขีปนาวุธอวกาศ............ ..... 1.6 ระบบเฝ้าระวังอวกาศ........... ............................... ................... .... วัตถุประสงค์และองค์ประกอบของจรวดและอวกาศคอมเพล็กซ์...................................... .. ................................................ .... ........................... 2.1 Space complex: วัตถุประสงค์และองค์ประกอบของส่วนหลัก........ .... ..... 2.2 จรวดและอวกาศที่ซับซ้อน: องค์ประกอบและวัตถุประสงค์ขององค์ประกอบหลัก ส่วนที่ 2 พื้นฐานของการก่อสร้างจรวดเปิดตัวหน่วยบนและยานพาหนะอวกาศ ........ .... ...................... การสกัด หมายถึง............................. ............................................................ ............... ..... 3.1 ข้อมูลทั่วไปเกี่ยวกับการเปิดตัวยานพาหนะ................................................ .............. .............. 3.2 เปิดตัวเครื่องยนต์ของยานพาหนะ.................. ...................................................... ...................... 3.3 เงื่อนไขในการใช้งานจรวด -พาหนะ............................ ................... 3.4 รถส่งแบบออกแบบที่อยู่อาศัย........................... ............................... .......... 3.5 ระบบออนบอร์ดของยานปล่อย ................................
.................................. 3.5.1 ผู้บริหาร ระบบควบคุมการปล่อยตัวรถ........................ 3.5.2 ระบบการปล่อยตัวรถ............. ................ ................................ 3.5.3 ระบบนิวเมติกไฮดรอลิก ของยานปล่อย.......... .......................... 3.6 บล็อกการเร่งความเร็ว....... ............... ................................... ................................ .......................... ยานพาหนะอวกาศ... ......................... ......................... ...................... 4.1 ข้อมูลทั่วไปเกี่ยวกับยานอวกาศ แนวโน้มการเปลี่ยนแปลงการออกแบบยานอวกาศสมัยใหม่........................................ ........... 4.2 หลักการสร้างแผนภาพโครงสร้างและแผนผังและการออกแบบยานอวกาศ........................... ................................ ................ .................... 4.3 สภาพการทำงานของยานอวกาศ........ ................. 4.3.1 การบรรทุกยานอวกาศ................................ ........ ....................... 4.3.2 การกลับคืนของตัวกลาง (สุญญากาศอวกาศ).......... ...... ............................ 4.3.3 ฝนดาวตกและเศษอวกาศ....... ...... ......................................... 4.3.4 แรงโน้มถ่วงเป็นศูนย์... . ................................................ ..... ........................................... 4.3. 5 รังสีคอสมิก (รังสี) และการไหลของความร้อน................................ พื้นฐานทางเทคนิคของวิศวกรรมจรวดและอวกาศ.. 5.1 วัสดุโครงสร้างของอุปกรณ์เทคโนโลยีจรวดและอวกาศ........... 5.2 วัสดุป้องกันความร้อน........... ...................... ............................ ................... ส่วนที่ 3 พื้นฐานของการออกแบบอุปกรณ์เทคโนโลยีของจรวดและอวกาศคอมเพล็กซ์...... ข้อมูลทั่วไปเกี่ยวกับอุปกรณ์เทคโนโลยีของจรวดและ SPACE COMPLEX................................. ................. 6.1 ข้อมูลพื้นฐานเกี่ยวกับ คอสโมโดรม................................................................ ................. 6.2 ข้อมูลพื้นฐานเกี่ยวกับพื้นที่ตำแหน่งของจรวดและอวกาศเชิงซ้อน....... ........... ........................................... ..... .......................................... 6.3 ข้อมูลทั่วไปเกี่ยวกับอุปกรณ์เทคโนโลยีของจรวด และอวกาศคอมเพล็กซ์................................................ ..... ........................................... .......... ......... 6.4 แนวคิดของกระบวนการทางเทคโนโลยีทั่วไป เนื้อหาและลำดับการดำเนินการทางเทคโนโลยีด้วยเครื่องยิงจรวดในศูนย์เทคนิคและศูนย์....... 6.4.1 เนื้อหาของงานหลักที่ดำเนินการด้วยเทคโนโลยีจรวดและอวกาศที่ศูนย์เทคนิค....... ....... ............................................... 6.4.2 เนื้อหาของงานหลักที่ดำเนินการเกี่ยวกับเทคโนโลยีจรวดและอวกาศที่ศูนย์ปล่อยจรวด................................ .................. ...................... วัตถุประสงค์และองค์ประกอบของอุปกรณ์เทคโนโลยีทางเทคนิคและการเปิดตัว คอมเพล็กซ์............................ .......... 7.1 วัตถุประสงค์และองค์ประกอบของอุปกรณ์เทคโนโลยีของคอมเพล็กซ์ทางเทคนิค...... ................................ .................... ................................ ............. ........ 7.2 วัตถุประสงค์และองค์ประกอบของอุปกรณ์เทคโนโลยีของศูนย์ปล่อยตัว............................ ...... ................................................ ............ ............................... 7.3 คุณสมบัติของการเติมเชื้อเพลิง ยานอวกาศและยานปล่อย
วัตถุประสงค์และองค์ประกอบของอุปกรณ์เทคโนโลยีของสถานีเติมเชื้อเพลิงสำหรับยานอวกาศและยานปล่อยยาน................................ .................. 7.3.1 ลักษณะเฉพาะของยานอวกาศเติมเชื้อเพลิงและ RB........... ........................... ............... 7.3.2 วัตถุประสงค์และผลการปฏิบัติงาน ลักษณะของปั๊มน้ำมัน............................ ................. ........................................... .......... ................................ 7.3.3 องค์ประกอบและวัตถุประสงค์ของอุปกรณ์เทคโนโลยีของปั๊มน้ำมัน... . ................................................ ..... ........................................... .......... ....... ส่วนที่ 4 พื้นฐานของการผลิตและการดำเนินงานของ Space Rocket Complex.................... ................ .................... จรวด และ อุปกรณ์อวกาศเป็นวัตถุประสงค์ของการผลิตและการดำเนินงาน................ ................................ ........... 8.1 ลักษณะเด่นของเทคโนโลยีจรวดและอวกาศเป็นวัตถุปฏิบัติการ 8.1.1 คุณลักษณะของการดำเนินงานบนพื้นดินของสินทรัพย์พื้นที่................................ 8.1.2 การทำงาน คุณสมบัติของ RSC.................... .......................... ......................... 8.1.3 ลักษณะการเตรียมการผลิตและการเปิดตัวเครื่องยิงจรวด............ ........................ 8.1.4 คำอธิบายสั้น ๆ ของส่งยานพาหนะเป็นวัตถุปฏิบัติการ 8.1.5 คุณสมบัติของยานอวกาศเป็นวัตถุปฏิบัติการ....... 8.1.6 คุณสมบัติของส่วนประกอบเชื้อเพลิงจรวดและก๊าซอัดและอิทธิพลที่มีต่อการทำงานของจรวดอวกาศ...... ................................................ ...... .................... 8.2 คุณสมบัติของจรวดและเทคโนโลยีอวกาศเป็นวัตถุในการผลิต บทบาทและสถานที่ในการควบคุมคุณภาพของการผลิตและการทำงานของผลิตภัณฑ์จรวดและอุปกรณ์อวกาศ 9.1 แนวคิดเรื่องคุณภาพการปฏิบัติงาน การจำแนกคุณสมบัติการปฏิบัติงานของ KSR และคุณลักษณะต่างๆ........................................ 9.2 การควบคุมคุณภาพของจรวด และการผลิตเทคโนโลยีอวกาศ.. .......... 9.3 ปัญหาปัจจุบันของการควบคุมคุณภาพการผลิตจรวดและเทคโนโลยีอวกาศแบบไม่ทำลาย.............. ................ .................................... ...... บรรณานุกรม...... ...................................... ................................................... บทนำ การสร้างเทคโนโลยีจรวดและอวกาศถือเป็นหนึ่งในความโดดเด่น ความสำเร็จทางวิทยาศาสตร์และทางเทคนิคศตวรรษที่ 20 ซึ่งทำให้สามารถเริ่มการสำรวจ พัฒนา และการใช้อวกาศได้จริง ปิตุภูมิของเราเป็นผู้บุกเบิกในด้านการสำรวจอวกาศ - เราเป็นคนแรกที่ส่งดาวเทียมโลกเทียม การบินของมนุษย์สู่อวกาศ เปิดยุคของการสำรวจอวกาศ
ความสำเร็จของนักวิทยาศาสตร์ในประเทศในสาขานี้ได้รับการยอมรับจากทั่วโลก
ปัจจุบันไม่มีกิจกรรมของมนุษย์เพียงด้านเดียวที่ไม่ได้ใช้เทคโนโลยีอวกาศ
การเกิดขึ้นของเทคโนโลยีอวกาศเกิดจากความเป็นไปได้ในการใช้สินทรัพย์อวกาศซึ่งการสร้างนั้นเกี่ยวข้องกับการพัฒนาวิทยาศาสตร์และเทคโนโลยีหลายสาขาการใช้ความสำเร็จเกือบทั้งหมดของความก้าวหน้าทางวิทยาศาสตร์และเทคโนโลยีและค่าใช้จ่ายที่สำคัญของวัสดุ การเงิน เวลา และทรัพยากรบุคคล
ด้วยความช่วยเหลือของพื้นที่หมายถึงผลลัพธ์ที่สำคัญต่อไปนี้ได้รับในกิจกรรมของมนุษย์สาขาต่างๆ:
การขยายความสามารถด้านโทรศัพท์และเทคโนโลยีสารสนเทศ
ให้บริการการสื่อสารทางโทรทัศน์ระหว่างทวีป
การควบคุมอุตุนิยมวิทยาทั่วโลกโดยใช้ดาวเทียม ซึ่งเพิ่มความแม่นยำในการพยากรณ์อากาศอย่างมาก
ปรับปรุงการนำทางของเรือและเครื่องบิน
การค้นหาและการตรวจจับวัตถุในทะเล อากาศ และพื้นดินที่อยู่ในภาวะฉุกเฉิน
การควบคุมสิ่งแวดล้อมระดับโลกและระดับท้องถิ่น (การติดตาม) ของพื้นผิวบกและมหาสมุทร
ให้บริการด้านธรณีวิทยา การทำแผนที่ การสำรวจแร่ การตรวจจับอัคคีภัยและภัยพิบัติทางธรรมชาติอื่นๆ เป็นต้น
การแก้ปัญหาเฉพาะของการสำรวจและการใช้อวกาศสามารถทำได้ในระหว่างการดำเนินการของระบบอวกาศหรือพื้นที่เชิงซ้อนเพื่อวัตถุประสงค์ที่เกี่ยวข้อง โดยทั่วไป ระบบอวกาศเป็นระดับสูงสุดของการบูรณาการฟังก์ชันของสินทรัพย์อวกาศที่ออกแบบมาเพื่อแก้ไขปัญหาในอวกาศและจากอวกาศ และรวมถึงส่วนประกอบในวงโคจรและภาคพื้นดินทั้งหมดที่จำเป็นเพื่อให้ได้ผลลัพธ์ตามเป้าหมายที่ต้องการโดยผู้บริโภค
ในแง่ของความหลากหลายของงานที่ต้องแก้ไขตลอดจนองค์ประกอบเชิงปริมาณของสินทรัพย์พื้นที่ที่ใช้สถานที่พิเศษในโครงสร้างของคอมเพล็กซ์อวกาศนั้นถูกครอบครองโดยจรวดและคอมเพล็กซ์อวกาศ (RSC) ซึ่งออกแบบมาเพื่อมอบโซลูชั่น ปัญหาการปฏิบัติการภาคพื้นดินของยานอวกาศ ยานอวกาศ และระยะบน ภารกิจสำคัญประการหนึ่งของ RSC คือการเตรียมจรวดอวกาศเพื่อส่งและปล่อยยานอวกาศขึ้นสู่วงโคจรที่กำหนด
หนังสือเรียนเป็นความพยายามที่จะพิจารณาพื้นฐานของการออกแบบและการทำงานของจรวดและจรวดอวกาศวัตถุประสงค์องค์ประกอบงานข้อมูลทั่วไปเกี่ยวกับคุณสมบัติการออกแบบและการทำงานของส่วนประกอบตลอดจนบทบาทและสถานที่ควบคุมคุณภาพของ ผลิตภัณฑ์จรวดและเทคโนโลยีอวกาศระหว่างการผลิตและการดำเนินงาน
หนังสือเรียน "พื้นฐานการออกแบบจรวดและอวกาศ"
มีวัตถุประสงค์เพื่อเตรียมความพร้อมของผู้เชี่ยวชาญในสาขาการฝึกอบรม "ระบบจรวดและอวกาศ" ในสาขาการฝึกอบรม 160400 "การควบคุมคุณภาพผลิตภัณฑ์ของจรวดและอวกาศเชิงซ้อน" และสามารถใช้เป็นส่วนหนึ่งของกระบวนการศึกษาในสาขาวิชา " พื้นฐานของการออกแบบจรวดและอวกาศ" และยังมีประโยชน์สำหรับนักศึกษาระดับบัณฑิตศึกษาและอาจารย์ที่ทำงานวิจัยในสาขาวิชานี้ด้วย
จากการศึกษาสาขาวิชาที่เสนอ“ พื้นฐานของการออกแบบจรวดและอวกาศเชิงซ้อน” ผู้เชี่ยวชาญควรรู้พื้นฐานของการสร้างจรวดและอวกาศเชิงซ้อนเพื่อวัตถุประสงค์ต่าง ๆ และส่วนประกอบของพวกเขาพื้นฐานของการออกแบบจรวดและอวกาศเชิงซ้อนเป็นวัตถุในการควบคุม ในระหว่างการผลิตและการดำเนินงานและหลักการพื้นฐานของการทำงานของจรวดและอวกาศเชิงซ้อนประเภทต่าง ๆ วัตถุประสงค์ที่ตั้งใจไว้
สามารถวิเคราะห์ได้ สถานะปัจจุบันผลิตภัณฑ์ RKT และกระบวนการควบคุมคุณภาพสำหรับผลิตภัณฑ์ของจรวดและคอมเพล็กซ์อวกาศ วิเคราะห์ความสามารถในการทดสอบของผลิตภัณฑ์ของจรวดและคอมเพล็กซ์อวกาศในระหว่างการผลิตและการดำเนินงาน
แสดงให้เห็นถึงการประยุกต์ใช้วิธีการใหม่ในการควบคุมคุณภาพของผลิตภัณฑ์ RKK โดยคำนึงถึงคุณสมบัติของเทคโนโลยีการก่อสร้างและการเตรียมการ การเตรียมจรวดอวกาศสำหรับการเปิดตัวและการปล่อยยานอวกาศขึ้นสู่วงโคจรที่กำหนด
ในด้านข้อมูลและตรรกะวินัยจะพัฒนาสาขาวิชาของวงจรทางวิทยาศาสตร์และวิชาชีพทั่วไปและทำหน้าที่เป็นพื้นฐานข้อมูลและระเบียบวิธีสำหรับการศึกษาสาขาวิชาพิเศษของหลักสูตรปริญญาโทตลอดจนพื้นฐานระเบียบวิธีในการเตรียมและการเขียนปริญญาโท วิทยานิพนธ์.
ส่วนที่ 1 พื้นฐานของการก่อสร้างจรวดและอวกาศที่ซับซ้อน 1 ข้อมูลพื้นฐานเกี่ยวกับระบบอวกาศ
โครงสร้างของระบบอวกาศและคอมเพล็กซ์อวกาศ การแก้ปัญหาเฉพาะของการสำรวจและการใช้อวกาศทำได้สำเร็จในระหว่างการทำงานของระบบอวกาศหรือคอมเพล็กซ์อวกาศเพื่อวัตถุประสงค์ที่สอดคล้องกัน โดยทั่วไป ระบบอวกาศเป็นระดับสูงสุดของการบูรณาการฟังก์ชันของสินทรัพย์อวกาศที่ออกแบบมาเพื่อแก้ไขปัญหาในอวกาศและจากอวกาศ และรวมถึงส่วนประกอบในวงโคจรและภาคพื้นดินทั้งหมดที่จำเป็นเพื่อให้ได้ผลลัพธ์ตามเป้าหมายที่ต้องการโดยผู้บริโภค
โครงสร้างของระบบอวกาศ 1. เพื่อแก้ไขปัญหาเศรษฐกิจสังคม การสื่อสาร การนำทาง ภูมิศาสตร์ อุตุนิยมวิทยา ฯลฯ มีการสร้างและดำเนินการ CSs เพื่อรับรองการป้องกันของประเทศ - การสื่อสารและการควบคุมการต่อสู้ การลาดตระเวน การเตือนการโจมตีด้วยขีปนาวุธ ฯลฯ CS
CS ใด ๆ (รูปที่ 1.1) รวมถึงสินทรัพย์พื้นที่ซึ่งสามารถแบ่งออกเป็นสองกลุ่ม:
KS KK SpK รูปที่ 1.1 - โครงสร้างของระบบอวกาศหมายถึงการสร้าง การขยาย การดำเนินการ และการเติมก๊าซไอเสียของยานอวกาศ ซึ่งรวมกันเป็นคำว่า "คอมเพล็กซ์อวกาศ"
วิธีการทางเทคนิคของผู้บริโภคข้อมูลอวกาศ รวมเป็นหนึ่งเดียวโดยคำว่า "คอมเพล็กซ์ระบบอวกาศพิเศษ (SPS)"
โดยทั่วไป CC อาจมี CC หลายรายการ องค์ประกอบ วัตถุประสงค์ และหน้าที่ของ CC จะกล่าวถึงในข้อ 1.2
SpK ประกอบด้วยวิธีการและโครงสร้างทางเทคนิคพร้อมอุปกรณ์ที่ติดตั้งไว้ ออกแบบมาเพื่อรับข้อมูลพิเศษจากยานอวกาศ ลงทะเบียน ประมวลผล จัดเก็บ และส่งไปยังผู้บริโภค กองทุน SpK ตั้งอยู่ในศูนย์ที่เกี่ยวข้องสำหรับการรับและประมวลผลข้อมูลของหน่วยงานรัฐบาลกลางของสหพันธรัฐรัสเซีย ซึ่งเป็นสำนักงานใหญ่หลักของกองทัพและผู้บริโภครายอื่น
แผนภาพการทำงานของ CS แสดงไว้ในรูปที่ 1.2
RLV ที่เตรียมไว้ที่ศูนย์เทคนิคและศูนย์ปล่อยยานอวกาศจะส่งยานอวกาศขึ้นสู่วงโคจรที่กำหนด ข้อมูลทั้งหมดเกี่ยวกับการทำงานของอุปกรณ์ออนบอร์ดของยานปล่อยจรวดจะเข้าสู่ศูนย์ตรวจวัดของคอสโมโดรมเพื่อการวิเคราะห์ในภายหลัง ข้อมูลเกี่ยวกับการทำงานของระบบบนยานอวกาศจะถูกส่งไปยังศูนย์บัญชาการและการวัด (CMS) จากนั้นไปยังศูนย์ควบคุมการบิน ซึ่งจะออกคำสั่งที่จำเป็นไปยังระบบควบคุมยานอวกาศ ข้อมูลพิเศษ (เป้าหมาย) จะถูกส่งไปยัง SpK หากยานอวกาศมีองค์ประกอบส่งคืน (โมดูลลงจอด, แคปซูลสืบเชื้อสาย) การค้นหาการบำรุงรักษาและการส่งมอบให้กับผู้บริโภคจะดำเนินการโดยศูนย์ลงจอดและบำรุงรักษา (LMC) ซึ่งเป็นส่วนหนึ่งของยานอวกาศ
OG ของยานอวกาศเป็นส่วนหนึ่งของยานอวกาศไม่ใช่โดยตรง แต่เป็นส่วนสำคัญของศูนย์อวกาศ อย่างไรก็ตาม คุณภาพของการทำงานของ CS ส่วนใหญ่ขึ้นอยู่กับโครงสร้างของกลุ่มออร์บิทัล
ให้เราพิจารณาโครงสร้างของยานอวกาศ OG โดยใช้ตัวอย่างระบบนำทางและสื่อสารในอวกาศ "GLONASS" ซึ่งประกอบด้วยยานอวกาศ 24 ลำ วางยานอวกาศลำละ 8 ลำในระนาบสามเฟส ซึ่งแตกต่างกันในลองจิจูดของโหนดจากน้อยไปมาก วงโคจร ในระนาบแต่ละเฟส ยานอวกาศจะอยู่ในวงโคจรเป็นวงกลม ซึ่งมีองค์ประกอบที่มีลักษณะดังต่อไปนี้:
ความเอียง 650;
ระดับความสูง 19,100 กม.
ระยะเวลาหมุนเวียน 11 ชั่วโมง 15 นาที โครงสร้างนี้ช่วยให้สามารถแก้ไขปัญหาเป้าหมายได้อย่างต่อเนื่องโดยสลับใช้ยานอวกาศที่อยู่ในระนาบเฟสต่างๆ
ดังนั้น หากระนาบเฟสแรกมีลองจิจูดของโหนดจากน้อยไปหามาก 1 = 00 ดังนั้น ระนาบที่สองและสามจะมีลองจิจูดของโหนดจากน้อยไปหามาก 2 = 1200 และ 3 = 2400 ตามลำดับ ดังนั้นเวลาปล่อยยาน ILV ในการปล่อยยานเข้าสู่ระนาบเฟสต่างๆ ควรแตกต่างกันตามชั่วโมง (24 ชั่วโมง / 3 = 8 ชั่วโมง) เช่น 00.00.00, 8.00.00 และ 16.00.00 น. เวลาคลอดบุตรในมอสโก (UHF) . เพื่อให้มั่นใจถึงความแม่นยำที่ระบุของการแทรกยานอวกาศ (ข้อผิดพลาดสัมบูรณ์ในลองจิจูดของโหนดจากน้อยไปหามากของระนาบเฟสคือตามกฎแล้วไม่เกิน 10) ความล่าช้าในการเปิดตัวของยานพาหนะส่ง (ที่เรียกว่าหน้าต่างการเปิดตัว) ไม่ควรเกิน 4 นาที (24 60 1/360 = 4 นาที)
ยานอวกาศในระนาบเฟสควรอยู่ห่างจากกันในระยะทางเท่ากัน หากเราถือว่ามีความเป็นไปได้ที่จะปล่อยยานอวกาศทั้ง 8 ลำในระนาบเฟสเดียวกันในระหว่างวัน ยานอวกาศนั้นควรปล่อยใน 1 ชั่วโมง 24 นาที 22.5 วินาที (11 ชั่วโมง 15 นาที / 8 = 1 ชั่วโมงนาที 22.5 วินาที) . ดังนั้นหากยานอวกาศลำแรกเปิดตัวเวลา 00.00 UHF ดังนั้นลำสุดท้ายรูปที่ 1.2 - แผนภาพการทำงานของระบบอวกาศที่แปดควรเปิดตัวที่ 9 ชั่วโมง 50 นาที 37.5 UHF (1 ชั่วโมง 24 นาที 22.5 วินาที (8 1) = 9 ชม. 50 นาที 37.5 วิ)
การก่อตัวของก๊าซไอเสียของยานอวกาศเกิดขึ้นดังนี้ บล็อกที่ประกอบด้วยยานอวกาศ 3 ลำถูกปล่อยโดยยานยิงโปรตอน 1 คันไปยังตำแหน่งของยานอวกาศลำที่ 2
ดังนั้นเวลาปล่อยยานคือ 1 ชั่วโมง 24 นาที 22.5 วินาที UHF จากนั้นยานอวกาศลำที่ 1 และ 3 จะถูกย้ายไปยังจุดที่อยู่ติดกันโดยใช้ระบบขับเคลื่อนแก้ไข
เพื่อดำเนินการสร้างระนาบระยะนี้ต่อไป บล็อกถัดไปของยานอวกาศสามลำสามารถถูกปล่อยได้หลังจากผ่านไปหนึ่งวันเท่านั้น (หรือจำนวนวันจำนวนเต็มใดๆ ก็ตาม) และจะต้องถูกปล่อยไปยังจุดที่ยานอวกาศลำที่ 5 (เวลาปล่อยตัวของยานปล่อย - เวลา 5 ชั่วโมง 37 นาที 52.5 วิ UHF) . จากนั้นยานอวกาศลำที่ 4 และ 6 จะถูกส่งไปยังจุดที่อยู่ติดกัน
ในทางปฏิบัติ การสร้างกลุ่มดาวยานอวกาศในวงโคจรเต็มรูปแบบนั้นใช้เวลานาน โดยคำนวณเป็นปี การก่อสร้างและการขยายกลุ่มยานอวกาศนั้นดำเนินการพร้อมกันในทุกระนาบเฟส
เนื่องจากการมียานอวกาศ 12 ลำ (4 ลำในแต่ละระนาบ) จึงเป็นไปได้ที่จะใช้ระบบ GLONASS ตามวัตถุประสงค์ที่ต้องการได้นานถึง 18 ชั่วโมงต่อวัน
ตอนนี้เรามาดูคุณสมบัติของ CS ที่ใช้กันอย่างแพร่หลายมากที่สุดโดยย่อ
ระบบการสื่อสารอวกาศ 1. ยุคสมัยใหม่โดดเด่นด้วยการเติบโตอย่างรวดเร็วของข้อมูลในทุกด้านของกิจกรรมของมนุษย์ นอกเหนือจากการพัฒนาวิธีการส่งข้อมูลแบบดั้งเดิม (โทรศัพท์ โทรเลข วิทยุกระจายเสียง) ยังจำเป็นต้องสร้างข้อมูลประเภทใหม่ - โทรทัศน์ การแลกเปลี่ยนข้อมูลในระบบควบคุมอัตโนมัติและคอมพิวเตอร์ การส่งเมทริกซ์สำหรับการพิมพ์หนังสือพิมพ์ ฯลฯ .
ลักษณะระดับโลกของปัญหาทางเศรษฐกิจและการวิจัยทางวิทยาศาสตร์ การบูรณาการและความร่วมมือระหว่างรัฐในวงกว้างในด้านการผลิต การค้า กิจกรรมการวิจัย และการขยายตัวของการแลกเปลี่ยนในด้านวัฒนธรรม ได้นำไปสู่การเพิ่มขึ้นอย่างมีนัยสำคัญในความสัมพันธ์ระหว่างประเทศและระหว่างทวีป รวมถึงการแลกเปลี่ยนทางโทรทัศน์ โปรแกรม
การก่อสร้างสายเคเบิลภาคพื้นดินและใต้น้ำระยะไกลต้องใช้ทรัพยากรทุกประเภทเป็นจำนวนมาก การสื่อสารทางวิทยุมีความจุ ระยะ และความสามารถในการกำหนดค่าสำหรับการสื่อสารประเภทต่างๆ มากขึ้นอย่างมาก อย่างไรก็ตาม ลิงก์วิทยุมีข้อเสียบางประการที่ทำให้การใช้งานยากในหลายๆ กรณี วิธีใหม่ในการเอาชนะข้อบกพร่องโดยธรรมชาติของการสื่อสารทางวิทยุระยะไกลได้เปิดขึ้นโดยยานอวกาศที่ปล่อยสู่วงโคจร ดาวเทียมประดิษฐ์โลกและการสร้างระบบสื่อสารอวกาศบนพื้นฐานของพวกเขา
ระบบการสื่อสารอวกาศ (SCS) ได้รับการออกแบบมาเพื่อให้บริการการสื่อสารทางไกลทุกประเภท (ระหว่างเมือง ระหว่างประเทศ ข้ามทวีป) การกระจายเสียงวิทยุและโทรทัศน์ การส่งข้อมูลบนอินเทอร์เน็ต ฯลฯ SCS เรียกอีกอย่างว่า ระบบดาวเทียมการสื่อสาร
การปฏิบัติได้ยืนยันว่าการใช้ยานอวกาศเพื่อการสื่อสาร โดยเฉพาะอย่างยิ่งในระยะไกลระหว่างประเทศและระหว่างทวีป โทรทัศน์และการควบคุมทางไกล เมื่อส่งข้อมูลปริมาณมาก ช่วยให้สามารถขจัดปัญหาหลายประการที่มีอยู่ในการสื่อสารทางวิทยุแบบดั้งเดิมได้ ในกรณีนี้ สามารถใช้การถ่ายทอดแบบพาสซีฟหรือแอคทีฟได้
ในการจัดระเบียบการสื่อสารทางวิทยุในช่วง VHF บนพื้นที่ขนาดใหญ่เพียงพอ จำเป็นต้องสร้างรีพีทเตอร์ระดับกลางจำนวนมาก เนื่องจากยานอวกาศสามารถสังเกตได้พร้อมกันจากหลายจุดที่ต้องสร้างการสื่อสาร จึงสามารถใช้เพื่อถ่ายทอดสัญญาณวิทยุได้ วิธีแก้ปัญหาที่ง่ายที่สุดคือการใช้ยานอวกาศเป็นวัตถุที่สะท้อนคลื่นวิทยุที่มุ่งเป้าไปที่ยานอวกาศ หลักการนี้รองรับวิธีการถ่ายทอดแบบพาสซีฟ (รูปที่ 1.3)
ยานอวกาศสื่อสาร รูปที่ 1.3 - แผนภาพการสื่อสารโดยใช้ยานอวกาศสื่อสารโดยใช้วิธีการถ่ายทอดแบบพาสซีฟ A, B - จุดส่งและรับที่ทำงานที่ความถี่ f1;
A1, B1 – จุดส่งและรับที่ทำงานที่ความถี่ f เซสชันการสื่อสารเป็นไปได้เฉพาะเมื่อยานอวกาศสื่อสารอยู่ในโซนที่มองเห็นเครื่องส่งและเครื่องรับพร้อมกันได้ และเสาอากาศของพวกมันหันเข้าหายานอวกาศ สัญญาณที่มีความถี่ f1 จากตัวส่งสัญญาณ A จะถูกส่งไปในทิศทางของยานอวกาศ อุปกรณ์บนยานอวกาศจะรับสัญญาณ ขยายสัญญาณ และถ่ายทอดที่ความถี่ f1 ไปยังเครื่องรับ B ซึ่งรับประกันการรับสัญญาณ การขยาย และการใช้งาน
แม้จะมีความเรียบง่ายที่ชัดเจน ต้นทุนต่ำ และข้อได้เปรียบทางเทคนิคบางประการของ CSS ดังกล่าว (ความเป็นไปได้ของการทำงานพร้อมกันของผู้สื่อข่าวจำนวนมาก การพึ่งพาคุณภาพการสื่อสารเฉพาะกับการสะท้อนแสงของยานอวกาศ) แต่ก็มีข้อเสียร้ายแรง โดยเฉพาะอย่างยิ่ง เพื่อรักษาการสื่อสารที่มีเสถียรภาพ จำเป็นต้องมีกำลังส่งสูงและความไวสูงในการรับอุปกรณ์ภาคพื้นดิน แต่แม้ว่าจะตรงตามเงื่อนไขเหล่านี้ สายวิทยุก็ยังทำงานได้ไม่เสถียรเพียงพอและมีการรบกวนอย่างมาก นอกจากนี้ระยะเวลาของการดำรงอยู่ของยานอวกาศดังกล่าวเนื่องจากการเปลี่ยนแปลงรูปร่างและการเสื่อมสภาพของคุณสมบัติการสะท้อนแสงกลายเป็นระยะเวลาสั้น ดังนั้นหลักการของการสะท้อนกลับจึงไม่พบว่ามีการพัฒนาเพิ่มเติมในระบบการสื่อสารในอวกาศ
หลักการใช้การสื่อสารของยานอวกาศกับรีเลย์แบบแอคทีฟนั้นได้รับการยอมรับและแพร่หลาย ในกรณีนี้ระบบสื่อสารจะทำงานดังนี้ (รูปที่ 1.4)
รูปที่ 1.4 - รูปแบบการสื่อสารโดยใช้ยานอวกาศสื่อสารโดยใช้วิธีการถ่ายทอดแบบแอคทีฟ ZSV1 - โซนของการมองเห็นร่วมของยานอวกาศสื่อสารตามจุด A และ B ที่ระดับความสูงของวงโคจร H1
ZSV2 – โซนการมองเห็นร่วมของยานอวกาศสื่อสารตามจุด A และ B ที่ระดับความสูงของวงโคจร H2
f1 – ความถี่ในการส่งก่อนการส่งสัญญาณซ้ำ
f2 – ความถี่การส่งหลังจากการส่งสัญญาณซ้ำ สถานี I ซึ่งอยู่ที่จุด A ผ่านระบบกราวด์กลางที่สอดคล้องกัน (เสาอากาศ) จะส่งสัญญาณที่มีความถี่ f1 ไปยัง ทิศทาง A-Cบนดาวเทียมสื่อสารที่อยู่ในโซนการมองเห็นของจุด A และ B
บนยานอวกาศสัญญาณเหล่านี้จะได้รับ ขยาย และส่งอีกครั้ง แต่ที่ความถี่ f2 นิ้ว ทิศทาง S-B. ที่จุด B สัญญาณที่ได้รับจะถูกประมวลผลและส่งผ่านช่องทางการสื่อสารภาคพื้นดินไปยังสถานี II
ความจำเป็นในการทวนสัญญาณของยานอวกาศในการรับและส่งข้อมูลจำนวนมากที่ความถี่ f1 นำไปสู่ความต้องการอุปกรณ์รับบรอดแบนด์ซึ่งสัญญาณรบกวนก็แทรกซึมเข้ามาพร้อมกับสัญญาณที่มีประโยชน์ สัญญาณรบกวนที่ขยายและส่งที่ความถี่ f2 จะทำให้คุณภาพของการสื่อสารลดลง ดังนั้นทวนสัญญาณสมัยใหม่จึงติดตั้งอุปกรณ์ประมวลผล (ตัวกรอง) ที่จะล้างสัญญาณที่เป็นประโยชน์จากการรบกวน
หลักการสื่อสารในอวกาศด้วยแอคทีฟรีเลย์เกี่ยวข้องกับการติดตั้งเสาอากาศ อุปกรณ์รับและส่งสัญญาณที่เหมาะสม รวมถึงแหล่งจ่ายไฟบนยานอวกาศ ทำให้สามารถลดกำลังส่งและความไวของอุปกรณ์รับสัญญาณลงได้อย่างมาก
ประเด็นสำคัญประการหนึ่งคือพารามิเตอร์ของวงโคจรของยานอวกาศ เพื่อจัดระเบียบการสื่อสารอย่างต่อเนื่องทั่วโลกในประเทศของเราซึ่งตั้งอยู่ในซีกโลกเหนือ ขอแนะนำให้ใช้วงโคจรรูปวงรีสูงโดยมีระยะเวลาการโคจร 12 ชั่วโมงเพื่อวางยานอวกาศ ยานอวกาศลำหนึ่งจะไปถึงจุดสุดยอดและกลับสู่จุดสิ้นสุด สามารถให้การมองเห็นร่วมกันของดินแดนตะวันตกและตะวันออกไกลของเราเป็นเวลา 8 ชั่วโมง เพื่อให้มั่นใจถึงความต่อเนื่องของการสื่อสาร ยานอวกาศสี่ลำถูกรวมอยู่ในระบบยานอวกาศในวงโคจรรูปไข่สูง เนื่องจากตามเทคโนโลยีการควบคุม ใช้เวลาหนึ่งชั่วโมงในการตรวจสอบสถานะของยานอวกาศด้วยการวัดระยะไกล เปิดทวนสัญญาณและ "ดึง" เข้าสู่โหมดเมื่อ เข้าสู่โซนการมองเห็นรวมถึงการวัดและส่งข้อมูลทางไกลและปิดเมื่อออกจากโซนการมองเห็น
ในช่วงคลื่นวิทยุบางช่วง ความจุของช่องสัญญาณ (ลำตัว) ของยานอวกาศหนึ่งลำ (ดาวเทียมรีเลย์) ไม่สามารถตอบสนองความต้องการในการจัดองค์กรการสื่อสาร ในเรื่องนี้มีความจำเป็นต้องเพิ่มจำนวนยานอวกาศใน OG และแยกพื้นที่ให้บริการสำหรับพวกเขา ปรากฎว่าสมาชิกจำนวนมากที่สุดตั้งอยู่ในแถบละติจูด 40° - 60° เหนือและใต้ และเพื่อจุดประสงค์เหล่านี้ จะสะดวกที่สุดในการจัดการสื่อสารโดยใช้ดาวเทียมที่ตั้งอยู่ที่ วงโคจรค้างฟ้า(รูปที่ 1.5) จุดที่ระบุในรูปสอดคล้องกับตำแหน่งของยานอวกาศในวงโคจรระหว่างวัน
ยานอวกาศสื่อสาร ยานอวกาศสื่อสาร รูปที่ 1.5 – ตำแหน่งวงโคจรของยานอวกาศสื่อสารในวงโคจรทรงรีสูงและอยู่ในวงโคจรค้างฟ้า: 0 – 24 – ชั่วโมงของวัน ให้เราอธิบายลักษณะของยานอวกาศที่รวมอยู่ใน CSS ยานอวกาศประเภท Molniya สี่ลำ
(รูปที่ 1.6) ในวงโคจรรูปวงรีสูงและยานอวกาศประเภท Horizon จำนวน 4 ลำ
(รูปที่ 1.7) หรือ "หน้าจอ" (รูปที่ 1.8) ในวงโคจรค้างฟ้าให้ (พร้อมสำรอง) การจัดระเบียบการสื่อสารระดับโลกในซีกโลกเหนือและในซีกโลกใต้ - สูงถึงละติจูด 60°
ดาวเทียมสื่อสาร Molniya มีอุปกรณ์สองประเภท: บริการ (บริการ) และพิเศษ การบริการอุปกรณ์บนเครื่องบินประกอบด้วยระบบ เครื่องมือ และหน่วยอเนกประสงค์ที่รับรองการทำงานของยานอวกาศ ตรวจสอบสภาพและควบคุมการบิน โดยไม่คำนึงถึงลักษณะของภารกิจที่ดำเนินการ
รูปที่ 1.6 – ยานอวกาศสื่อสาร “มอลนียา-2”
รูปที่ 1.7 – ยานอวกาศสื่อสาร “ฮอไรซอน”
รูปที่ 1.8 – ยานอวกาศสื่อสาร “เอกราน”
องค์ประกอบและวัตถุประสงค์ของการบริการอุปกรณ์บนเครื่องบินซึ่งตามกฎแล้วจะเหมือนกันสำหรับยานอวกาศส่วนใหญ่ จะมีการหารือในย่อหน้าที่ 1.5
อุปกรณ์พิเศษบนยานอวกาศ Molniya ประกอบด้วย:
เสาอากาศสำหรับรับและส่งสัญญาณ Earth - บอร์ด - Earth และระบบติดตามและขับเคลื่อนของอุปกรณ์เสาอากาศที่เกี่ยวข้องกับการทำงาน ยานอวกาศมีเสาอากาศพาราโบลาสองเสาที่มีโครงสร้างตาข่ายพับ ซึ่งจะเปิดออกหลังจากที่ยานอวกาศเข้าสู่วงโคจร ในระหว่างการบินทั้งหมด เสาอากาศจะมุ่งไปที่ศูนย์กลางของโลก
รีพีเตอร์ประกอบด้วยอุปกรณ์รับ แปลง และขยายสัญญาณ ดาวเทียมมีตัวทวนสามตัว:
ตัวสำรองหลักหนึ่งและสองตัวแทนที่ตัวหลักหากจำเป็น
การตรวจสอบตำแหน่งของยานอวกาศในอวกาศ, การวัดพารามิเตอร์การเคลื่อนไหว, การกำหนดพารามิเตอร์ของวงโคจรและการปรับ, ทำนายการเคลื่อนที่ของยานอวกาศ, ตรวจสอบสภาพและการทำงานที่ถูกต้องของระบบออนบอร์ดและการวินิจฉัย, ติดตามการใช้พลังงาน ทรัพยากรของยานอวกาศและการปฏิบัติตามข้อกำหนดที่จัดตั้งขึ้น ระบอบการปกครองของอุณหภูมิการออกโปรแกรมปัจจุบันและคำสั่งครั้งเดียวบนยานอวกาศ การตรวจสอบเส้นทางและการดำเนินการ รวมถึงฟังก์ชันการจัดการอื่น ๆ ดำเนินการโดยบริการและสิ่งอำนวยความสะดวกของศูนย์ควบคุมภาคพื้นดิน
ดาวเทียมประเภท Ekran ซึ่งเริ่มใช้ในปี พ.ศ. 2519 ถูกวางไว้ในวงโคจรค้างฟ้าและได้รับการออกแบบเพื่อให้โทรทัศน์และวิทยุกระจายเสียงในพื้นที่ห่างไกล ดังนั้นพื้นที่ให้บริการของยานอวกาศ Ekran ที่มีตำแหน่ง 90° ตะวันออกจึงขยายจากโนโวซีบีร์สค์ไปยังยาคุตสค์ ช่วยให้มั่นใจได้ถึงการรับสัญญาณโดยตรงจากยานอวกาศไปยังเสาอากาศรวมขนาดเล็กแบบเรียบง่ายซึ่งติดตั้งบนหลังคาบ้านโดยตรง ในระหว่างการติดตั้ง พวกมันจะหันไปทางยานอวกาศค้างฟ้าด้วยความแม่นยำ 1-3°
โปรดทราบว่า "การยืน" ของยานอวกาศเอครานเหนือพื้นที่ให้บริการที่กำหนดจะต้องได้รับความมั่นใจด้วยความแม่นยำสูง: ประมาณ 0.5°-1° ในละติจูดและลองจิจูด หากจำเป็น ให้ปรับวงโคจรโดยใช้ไมโครมอเตอร์ควบคุมแบบออนบอร์ด นอกจากนี้ยังมีความต้องการสูงในระบบควบคุมทัศนคติ: ความเบี่ยงเบนของยานอวกาศจากทิศทางที่กำหนดไม่ควรเกิน 0.1o เทคโนโลยีอวกาศสมัยใหม่สามารถให้ความแม่นยำดังกล่าวได้ ข้อผิดพลาดในการวางแนวเสาอากาศออนบอร์ดทำให้พื้นที่ให้บริการลดลงอย่างมาก ดังนั้น หากการวางแนวไม่ถูกต้อง 1° พื้นที่ให้บริการโทรทัศน์จะมีค่าเพียงประมาณ 60% ของค่าสูงสุดที่เป็นไปได้
เพื่อให้ คุณภาพสูงสัญญาณบนดาวเทียมสื่อสารสมัยใหม่ ใช้เสาอากาศออนบอร์ดที่มีทิศทางสูงโดยมีความกว้างของลำแสงตั้งแต่ 17° (ครอบคลุมทั่วโลก) ถึง 2°-4°
ตั้งแต่ปี พ.ศ. 2510 เครือข่ายโทรทัศน์อวกาศ Orbita ได้เปิดดำเนินการในประเทศของเราบนพื้นฐานของดาวเทียม Molniya (รูปที่ 1.9)
สัญญาณโทรทัศน์จากศูนย์โทรทัศน์ในมอสโกจะถูกส่งผ่านช่องทางการสื่อสารภาคพื้นดินไปยังหนึ่งในสถานีภาคพื้นดินของ Molniya KSS และส่งสัญญาณไปยังยานอวกาศ Molniya ผ่านเสาอากาศ ที่นี่จะได้รับและถ่ายทอดทันทีไปยังสถานีรับสัญญาณทั้งหมดของเครือข่าย Orbita ที่ตั้งอยู่ใน เวลาที่กำหนดในระยะการมองเห็นของยานอวกาศ ได้รับจากยานอวกาศโดยสถานีออร์บิต้า
สัญญาณโทรทัศน์จะถูกส่งผ่านสายเคเบิลบรอดแบนด์ไปยังศูนย์โทรทัศน์ท้องถิ่น ซึ่งใช้เครื่องส่งสัญญาณและเสาอากาศโทรทัศน์ในการถ่ายทอดรายการโทรทัศน์ไปยังเครื่องรับโทรทัศน์ในภูมิภาค
รูปที่ 1.9 – รูปแบบการออกอากาศทางโทรทัศน์โดยใช้ยานอวกาศ Molniya
ในระบบออร์บิต้า
เอ – ศูนย์โทรทัศน์ของโทรทัศน์กลาง
B – ช่องทางการสื่อสารภาคพื้นดิน
B – จุดสื่อสารของอาคารภาคพื้นดิน Molniya
G – ดาวเทียมสื่อสาร “มอลนิยา”;
D - สถานีรับสัญญาณของเครือข่าย Orbita
E - ศูนย์โทรทัศน์ท้องถิ่นและพื้นที่ครอบคลุมสถานีของเครือข่าย Orbita ตั้งอยู่ในอาคารคอนกรีตเสริมเหล็กทรงกลมหลังคาซึ่งทำหน้าที่เป็นรากฐานสำหรับเสาอากาศพาราโบลาประสิทธิภาพสูงโดยมีเส้นผ่านศูนย์กลางกระจก 12 ม. ขนาดค่อนข้างเล็กของกระจก ความเบาและความเรียบง่ายของการออกแบบเสาอากาศนั้นเกิดจากพลังงานที่ค่อนข้างสูงของเครื่องส่งสัญญาณยานอวกาศ " ฟ้าผ่า"
ช่วงความเร็วที่อนุญาตของเสาอากาศภาคพื้นดิน Orbit
ช่วยให้มั่นใจในการติดตามยานอวกาศที่เชื่อถือได้ในทุกระดับความสูงและมุมราบของตำแหน่งที่สัมพันธ์กับสถานี
การคำนวณแสดงให้เห็นว่ายานอวกาศสื่อสารอยู่ในวงโคจรรูปวงรีสูงโดยมีพารามิเตอร์ต่อไปนี้: ความเอียง i = 65;
ระดับความสูง perigee Hn = 400 กม., ระดับความสูงสูงสุด Na = 40,000 กม., คาบการโคจร T = 12 ชั่วโมง, สามารถตรวจสอบการมองเห็นยานอวกาศพร้อมกันในภูมิภาคตะวันตกและตะวันออกของสหพันธรัฐรัสเซียเป็นเวลา 8 ชั่วโมง
หน่วยบัญชาการและควบคุมทางทหารมีบทบาทสำคัญในการบังคับบัญชาและควบคุม
ดังนั้นการใช้งานในลิงค์ปฏิบัติการ “สมาคม - การเชื่อมต่อ”
ให้ระยะการสื่อสารเพิ่มขึ้นสูงสุด 10,000 กม. และความเร็วในการรับส่งข้อมูลสูงสุด 1,500 บิต/วินาที
การใช้ CSS ทำให้สามารถก้าวกระโดดเชิงคุณภาพในองค์กรการสื่อสาร ดังนั้นการสื่อสารเคลื่อนที่ซึ่งจนกระทั่งเมื่อไม่นานมานี้ดูแปลกใหม่ได้เข้ามาในชีวิตอย่างมั่นคงและพร้อมให้บริการแก่ผู้คนหลายล้านคนภายในหนึ่งทศวรรษอย่างแท้จริง การพัฒนา CSN จะมีจุดมุ่งหมายเพื่อให้มั่นใจว่าการสื่อสารทั่วโลกมีเสถียรภาพและต่อเนื่องของสมาชิกในระดับต่างๆ เพิ่มขีดความสามารถของเครือข่ายการสื่อสาร และการจัดพื้นที่โทรคมนาคมหลายระดับ
ระบบนำทางในอวกาศ 1. บนโลก บนเส้นทางทะเล และในอวกาศใกล้โลก จำนวนของวัตถุควบคุมที่ต้องการการสนับสนุนการนำทางอย่างต่อเนื่อง—การกำหนดตำแหน่ง วิถีทาง และความเร็วที่แม่นยำ—นั้นเพิ่มขึ้นอย่างต่อเนื่อง ระดับปัจจุบันและโดยเฉพาะอย่างยิ่งโอกาสในการพัฒนาการขนส่งนั้นมีลักษณะเฉพาะด้วยการขยายโซนการสื่อสารที่สำคัญและการเพิ่มความเร็วของยานพาหนะ: เชี่ยวชาญ ความเร็วเหนือเสียงในการบินพลเรือน ความเร็วของเรือเดินทะเลและมหาสมุทรได้เพิ่มขึ้นอย่างมีนัยสำคัญ สายการบินระหว่างประเทศข้ามพื้นที่อันกว้างใหญ่ครอบคลุมทั่วโลก อาร์กติกและแอนตาร์กติกซึ่งเจาะเข้าสู่ศูนย์กลางซึ่งจนกระทั่งเมื่อไม่นานมานี้เป็นการกระทำที่กล้าหาญและกล้าหาญได้กลายเป็นสนามธรรมดา เส้นทางคมนาคม. เมื่อปริมาณ ประสิทธิภาพ และความสำคัญของงานขนส่งเพิ่มขึ้น ข้อกำหนดสำหรับคุณภาพของการสนับสนุนการนำทางก็เพิ่มขึ้น วัตถุจำนวนมากต้องการการพิจารณาการนำทางบ่อยครั้งมากและมีความแม่นยำสูงตลอดเวลา ไม่ว่าสภาพอากาศจะเป็นอย่างไร วัตถุที่กำลังเคลื่อนที่ด้วยความเร็วสูงจำเป็นต้องมีการพิจารณาการนำทางในเวลาที่จำกัด และบ่อยครั้งจะเป็นแบบเรียลไทม์
ดังนั้นจึงมีความต้องการสูงในการรองรับการนำทางสมัยใหม่ ซึ่งหลัก ๆ ได้แก่:
ความเป็นสากลเช่น ความสามารถในการกำหนดการนำทางทุกที่บนโลกหรือพื้นที่ใกล้โลกในเวลาใดก็ได้ของวัน โดยไม่คำนึงถึงสภาพอากาศ
ประสิทธิภาพเช่น ความสามารถในการกำหนดการนำทางในไม่กี่นาทีหรือวินาที (ในแบบเรียลไทม์)
ความแม่นยำของคำจำกัดความการนำทาง
วิธีการสนับสนุนการนำทางสำหรับวัตถุต่างๆ ขึ้นอยู่กับการวัดตำแหน่งของวัตถุโดยสัมพันธ์กับจุดสังเกตใดๆ ที่มีพิกัดที่ทราบ
วิธีการนำทางบนท้องฟ้าแบบดั้งเดิมใช้ดวงอาทิตย์ ดวงจันทร์ และดวงดาวเป็นจุดสังเกต
ในวิธีการนำทางด้วยวิทยุภาคพื้นดิน - บีคอนวิทยุที่มีพิกัดที่ทราบคงที่
ในวิธีแม่เหล็ก-ขั้วโลก
วัตถุในอวกาศเทียมยังสามารถใช้เป็นจุดสังเกตได้ เช่น ยานอวกาศที่อยู่ในวงโคจรของดาวเทียมโลกเทียม หากวัตถุนั้นทราบพิกัดของวัตถุซึ่งจำเป็นต้องระบุตำแหน่งและความเร็ว
เป็นไปไม่ได้ที่จะรับประกันการปฏิบัติตามข้อกำหนดที่ระบุไว้ในด้านความเป็นสากล ประสิทธิภาพ และความแม่นยำโดยสมบูรณ์ผ่านการพัฒนาวิธีการนำทางแบบดั้งเดิมเท่านั้น เนื่องจากส่วนใหญ่ขึ้นอยู่กับสภาพอากาศและการใช้บีคอนวิทยุไม่อนุญาตให้ครอบคลุมพื้นที่ที่ต้องการทั้งหมด
ระบบที่ยานอวกาศที่อยู่ในวงโคจรของดาวเทียมโลกเทียมถูกเลือกเป็นจุดอ้างอิงเรียกว่าระบบนำทางในอวกาศ (SNS) ได้รับการออกแบบมาเพื่อกำหนดพารามิเตอร์การนำทาง (พิกัดตำแหน่งและส่วนประกอบเวกเตอร์ความเร็ว) ของวัตถุที่กำลังเคลื่อนที่ (ยานอวกาศ เครื่องบิน เรือ ระบบขีปนาวุธเคลื่อนที่ ฯลฯ) และส่งพารามิเตอร์เหล่านี้ไปยังผู้บริโภค ระบบประสาทส่วนกลางมีความโดดเด่นด้วยคุณสมบัติหลายประการที่สามารถเพิ่มประสิทธิภาพการรองรับการนำทางได้อย่างมาก การกำหนดการนำทางที่นี่ขึ้นอยู่กับการวัดพารามิเตอร์ของสัญญาณวิทยุที่ปล่อยออกมาจากยานอวกาศ ในกรณีนี้ คุณสามารถใช้ช่วง VHF ซึ่งสามารถใช้อุปกรณ์ตรวจวัดที่แม่นยำที่สุดได้ ซึ่งให้ความแม่นยำสูงในการวัดช่วงและอัตราการเปลี่ยนแปลงของช่วงนี้สัมพันธ์กับยานอวกาศ
ความครอบคลุมทั่วโลกของ SNS สามารถทำได้โดยการรวมดาวเทียมนำทางไว้ในจำนวนที่เพียงพอในระบบ เพื่อให้มั่นใจว่ามีความเป็นไปได้ในการสังเกตการณ์อย่างต่อเนื่อง ณ จุดใดก็ได้ในอวกาศใกล้โลก
ประสิทธิภาพที่เพิ่มขึ้นเกิดขึ้นได้เนื่องจากความเป็นไปได้ในการสังเกตยานอวกาศหลายลำพร้อมกัน
CNS มีส่วนประกอบดังต่อไปนี้ (รูปที่ 1.10):
CC รวมถึงยานอวกาศ OG และศูนย์ควบคุมภาคพื้นดิน (GCU);
วิธีการพิเศษสำหรับวัตถุที่ต้องมีการกำหนดการนำทาง ออกแบบมาเพื่อรับข้อมูลที่จำเป็นจากยานอวกาศ วัดพารามิเตอร์การนำทาง และคำนวณตำแหน่งและความเร็วการเคลื่อนที่ของวัตถุนี้
สถานีภาคพื้นดินของ NKU ดำเนินการตรวจวัดพารามิเตอร์การนำทางของยานอวกาศ การวัดเหล่านี้จะถูกส่งผ่านสายการสื่อสารไปยังศูนย์คอมพิวเตอร์ โดยที่พารามิเตอร์วงโคจรและการแก้ไขต่างๆ จะถูกกำหนดและทำนายตามการประมวลผล (เช่น ค่าของมาตราส่วนเวลาของนาฬิกาบนยานอวกาศ ฯลฯ)
พารามิเตอร์การโคจรสำหรับแต่ละช่วงเวลาที่คาดการณ์ไว้ ซึ่งโดยปกติเรียกว่ายานอวกาศ ephemeris และการแก้ไขต่างๆ จะถูกส่งผ่านช่องทางการสื่อสารไปยังสถานีส่งสัญญาณคำสั่ง สถานีจะส่งสิ่งเหล่านี้ไปยังยานอวกาศด้วยความถี่หนึ่งซึ่งจะถูกบันทึกไว้ในบล็อกหน่วยความจำ ยานอวกาศนำทางแต่ละลำจะได้รับข้อมูลชั่วคราว เนื่องจากพารามิเตอร์การโคจรของยานอวกาศที่แตกต่างกันและการเบี่ยงเบนของนาฬิกาบนเรือจะแตกต่างกัน
KA-2 KA-KA-KA- รูปที่ 1.10 – บล็อกไดอะแกรมของ SPS 1 – เครื่องมือวัด NAKU;
2 – สถานีส่งข้อมูลชั่วคราว
~ 3 – ศูนย์คอมพิวเตอร์;
4 – ผู้บริโภค;
D – พิสัย;
D – ความเร็วแนวรัศมี ยานอวกาศนำทางแต่ละลำจะส่งสัญญาณวิทยุอย่างต่อเนื่องและส่งข้อมูลชั่วคราวแบบเรียลไทม์
ผู้บริโภคที่ใช้อุปกรณ์วิทยุรับสัญญาณชั่วคราวและสัญญาณเวลาและวัดพารามิเตอร์การนำทางของยานอวกาศพร้อมกัน (หนึ่งรายการขึ้นไป) อุปกรณ์คอมพิวเตอร์ของผู้บริโภคจะประมวลผลข้อมูลที่ได้รับ คำนวณตำแหน่ง (และความเร็วของการเคลื่อนที่หากจำเป็น) และแนะนำการแก้ไขข้อมูลของระบบนำทางเฉื่อยหรือระบบนำทางแบบดั้งเดิมอื่น ๆ หากใช้ CNS ร่วมกับอุปกรณ์เหล่านั้น
ความแม่นยำในการกำหนดตำแหน่งของผู้บริโภคและความเร็วนั้นขึ้นอยู่กับข้อผิดพลาดในการกำหนดจุดชั่วคราว ความแม่นยำของนาฬิกาบนเครื่องบิน ปัจจัยทางเรขาคณิตที่แสดงถึงตำแหน่งสัมพัทธ์ของยานอวกาศ และสุดท้ายคือข้อผิดพลาดในการวัดพารามิเตอร์การนำทางโดย ผู้บริโภค.
ดังนั้นสำหรับระบบนำทาง GLONASS คำอธิบายที่ให้ไว้ในย่อหน้าที่ 1.1 จะให้คุณสมบัติทางเทคนิคดังต่อไปนี้:
ความแม่นยำในการกำหนดพิกัดของวัตถุที่กำลังเคลื่อนที่ – 100 ม.
ความแม่นยำในการกำหนดพิกัดของวัตถุที่อยู่นิ่ง – 10 ม.
ความแม่นยำในการกำหนดส่วนประกอบของเวกเตอร์ความเร็วของผู้ใช้บริการ – 0.15 เมตร/วินาที
ความแม่นยำของเวลาชั่วคราวที่อ้างอิงกับเวลาสากล – 5 ms;
เวลาของการกำหนดการนำทางครั้งแรกคือ 1-3 นาที การกำหนดครั้งต่อไปคือ 1-10 วินาที
ระบบนำทางในอวกาศจะได้รับการพัฒนาไปสู่การสร้างสรรค์ในระดับใหม่เชิงคุณภาพเพื่อประโยชน์ในการแก้ปัญหาต่างๆ ในการนำทางของวัตถุที่กำลังเคลื่อนที่ ตำแหน่งทางภูมิศาสตร์ที่มีความแม่นยำสูงในระหว่างการก่อสร้าง การสำรวจทางธรณีวิทยา ระหว่างงานเกี่ยวกับที่ดิน การควบคุมการขนส่งสินค้าอันมีค่า ,ปฏิบัติการกู้ภัยฉุกเฉิน เป็นต้น รองรับการนำทางจะรับบทบาทเป็นรายบุคคล เครื่องมือที่ทำให้สามารถรวมแผนที่ดิจิทัลเข้ากับการอ้างอิงตำแหน่งปัจจุบันของวัตถุที่กำลังเคลื่อนที่และอยู่กับที่ได้อย่างแม่นยำ ซึ่งกำหนดโดยใช้ CNS ด้วยวิธีส่งสัญญาณพิกัดของตัวเอง กำลังแพร่หลายมากขึ้น ในอนาคตระบบประสาทส่วนกลางจะมั่นคงในชีวิตประจำวัน
ระบบสภาพอากาศในอวกาศ 1. ข้อมูลเกี่ยวกับ สิ่งแวดล้อมจัดหาเครือข่ายอุตุนิยมวิทยาภาคพื้นดินของรัฐบาลกลางและแผนก ซึ่งรวมถึงการบิน เรือ อุปกรณ์อุตุนิยมวิทยาแบบบอลลูน สถานีอุตุนิยมวิทยาอัตโนมัติ (มหาสมุทร ทะเล แม่น้ำ ที่ดิน) และระบบอุตุนิยมวิทยาในอวกาศ (SMS)
เครือข่ายอุตุนิยมวิทยาภาคพื้นดินประกอบด้วยสถานีและเสาอุตุนิยมวิทยาและอุทกวิทยาหลายพันแห่ง หลายแห่งตั้งอยู่ในพื้นที่ที่เข้าถึงยาก เพื่อรวบรวมการพยากรณ์อากาศระยะยาวและแม่นยำเพียงพอ ข้อมูลจากเครือข่ายอุตุนิยมวิทยาภาคพื้นดินยังไม่เพียงพออย่างชัดเจน สาเหตุหลักมาจากการที่ 71% ของพื้นผิวโลกเป็นมหาสมุทรและทะเล และ 29% ที่เหลือของพื้นผิวมีพื้นที่ขนาดใหญ่ (ภูเขา ทะเลทราย ป่า ฯลฯ) ซึ่งสถานีตรวจอากาศหายากหรือไม่มีอยู่จริง สิ่งนี้จะลดคุณภาพการพยากรณ์อากาศลงอย่างมาก
สุทธิ การแลกเปลี่ยนระหว่างประเทศข้อมูลทางอุทกวิทยายังไม่ได้รับการพัฒนาอย่างเพียงพอ
การได้รับข้อมูลอุตุนิยมวิทยาด้วยความช่วยเหลือของอุปกรณ์อุตุนิยมวิทยาการบิน เรือ และบอลลูน ยังคงดำเนินการเป็นระยะๆ และในบางเส้นทางเท่านั้น
การพัฒนาเทคโนโลยีอวกาศที่ประสบความสำเร็จมีส่วนทำให้เกิด CMS ซึ่งสามารถเพิ่มความสามารถในการรับข้อมูลอุตุนิยมวิทยาได้อย่างมีนัยสำคัญเมื่อเปรียบเทียบกับวิธีดั้งเดิมและปรับปรุงคุณภาพการพยากรณ์
KMS ได้รับการออกแบบมาเพื่อแก้ไขปัญหาต่อไปนี้:
รับภาพทุ่งเมฆของโลก ติดตามต้นกำเนิดและการพัฒนาของกระบวนการในบรรยากาศ (พายุไซโคลน พายุเฮอริเคน ฯลฯ) รับรู้ถึงความอบอุ่นและความเย็น มวลอากาศ;
การรับการกระจายอุณหภูมิและความเร็วลมในบรรยากาศในแนวตั้ง
ศึกษาความสมดุลของการแผ่รังสีของระบบโลกและชั้นบรรยากาศ
การรวบรวมข้อมูลจากสถานีตรวจอากาศอัตโนมัติซึ่งตั้งอยู่ในพื้นที่ที่เข้าถึงยากของโลกและมหาสมุทรโลก และจากบอลลูน จากนั้นจึงส่งข้อมูลนี้ไปยังจุดรับหรือศูนย์ตรวจอากาศที่เหมาะสม
การส่งต่อข้อมูลที่ประมวลผลแล้วจากศูนย์อุตุนิยมวิทยาไปยังผู้บริโภค
ให้ข้อมูลอุตุนิยมวิทยาแก่ผู้บังคับบัญชาของสาขาของกองทัพ RF
โครงสร้างของระบบสภาพอากาศในอวกาศทั่วไปแสดงไว้ในรูปที่ 1.11
กลุ่มดาวในวงโคจรส่วนใหญ่มักประกอบด้วยยานอวกาศ 3 ลำในวงโคจรค้างฟ้า ซึ่งให้ทัศนวิสัย 90% พื้นผิวโลกและยานอวกาศ 1 2 ลำในวงโคจรขั้วโลกที่มีระดับความสูงสูงสุด 700-2,000 กม.
สถานีรับคำสั่งภาคพื้นดิน KMS ออกคำสั่งให้ส่งข้อมูลจากยานอวกาศรับและส่งไปยังศูนย์อุตุนิยมวิทยา
รูปที่ 1.11 – โครงสร้างของระบบอุตุนิยมวิทยาในอวกาศ 1 – ยานอวกาศอุตุนิยมวิทยา;
2 – ลูกโป่ง;
3 – สถานีอุตุนิยมวิทยาอัตโนมัติ
4 – สถานีสำหรับการรับข้อมูลโดยตรง
5 – ศูนย์พยากรณ์อากาศท้องถิ่น
6 – ผู้บริโภคข้อมูลอุตุนิยมวิทยา;
– สถานีวัดวิถี
8, 9 – สถานีสั่งและรับ;
10 – ศูนย์อุตุนิยมวิทยา;
11 – การควบคุมวงโคจรและการตั้งโปรแกรม
12 – การประมวลผลข้อมูล;
13 – การวิเคราะห์และการพยากรณ์อากาศ;
14 – การวิเคราะห์และการพยากรณ์ในท้องถิ่น
15 – การวิเคราะห์ดาวเคราะห์และการพยากรณ์ สถานีตรวจวัดวิถี NKU ดำเนินการตรวจสอบและพยากรณ์วงโคจรทางวิทยุ โดยส่งผลการคำนวณไปยังศูนย์อุตุนิยมวิทยา ซึ่งมีการพัฒนาโปรแกรมสำหรับสถานีสั่งการและรับ ศูนย์ตรวจอากาศเตรียมการวิเคราะห์ดาวเคราะห์และการพยากรณ์อากาศโดยใช้ข้อมูลจากสถานีรับคำสั่ง สถานีตรวจวัดวิถี และสถานีตรวจอากาศภาคพื้นดิน
ศูนย์พยากรณ์อากาศระดับภูมิภาคและท้องถิ่นจัดทำการวิเคราะห์และการพยากรณ์อากาศในท้องถิ่นโดยใช้ข้อมูลจากยานอวกาศและจากศูนย์พยากรณ์อากาศ
แผนภาพของ CMS ในประเทศ “Meteor” แสดงไว้ในรูปที่ 1.12 มันทำหน้าที่เป็นส่วนสำคัญของ World Weather Watch OG ประกอบด้วยยานอวกาศ Meteor 2-3 ลำที่อยู่ในวงโคจรต่ำกว่าขั้ว ใกล้กับวงกลม โดยมีพารามิเตอร์ต่อไปนี้: ความเอียงของวงโคจร i = 82.5o;
ความสูงของวงโคจร h = 1200-1300 กม. ข้อมูลจากยานอวกาศ Meteor จะถูกส่งผ่านระบบสื่อสารวิทยุทั่วโลกไปยังทุกประเทศสมาชิกขององค์การอุตุนิยมวิทยาโลก ระยะเวลาของการดำรงอยู่ของยานอวกาศคือ 2 ปี
ยานอวกาศซีรีส์ Meteor (รูปที่ 1.13) รวบรวมและส่งข้อมูลอุตุนิยมวิทยาอุตุนิยมวิทยาทั่วโลก ข้อมูลเกี่ยวกับสถานการณ์รังสีในอวกาศใกล้โลก และสถานะของโอโซโนสเฟียร์ทั่วโลกอย่างรวดเร็วไปยังผู้บริโภค ข้อมูลนี้เป็นพื้นฐานในการคาดการณ์ระยะยาวต่างๆ ปรากฏการณ์สภาพอากาศและช่วยให้คุณป้องกันความเสียหายของวัสดุเนื่องจากสภาพอากาศเลวร้ายเป็นจำนวนประมาณหนึ่งพันล้านรูเบิลต่อปี
รูปที่ 1.12 – แผนผังของระบบอุตุนิยมวิทยาดาวตก
รูปที่ 1.13 – ดาวเทียมอุตุนิยมวิทยา “ดาวตก”
ยานอวกาศ Meteor ให้บริการโซลูชั่นสำหรับงานต่อไปนี้:
การได้รับภาพเมฆที่มองเห็นได้และอินฟราเรด (IR) พื้นผิวโลก น้ำแข็งและหิมะปกคลุม ตลอดจนข้อมูลสำหรับการกำหนดอุณหภูมิของพื้นผิวทะเลในบรรยากาศที่ไม่มีเมฆ และอุณหภูมิการแผ่รังสีของพื้นผิวด้านล่าง
การได้รับข้อมูลสเปกโตรมิเตอร์เพื่อกำหนดโปรไฟล์อุณหภูมิแนวตั้ง การกระจายความเข้มข้นของโอโซนในแนวตั้ง และปริมาณทั้งหมดในบรรยากาศ
ดำเนินการตรวจวัดรังสีที่ระดับความสูงการบินของยานอวกาศ
การสะสมและการส่งผ่านตามโปรแกรมหรือคำสั่งใน ศูนย์หลักการรับและประมวลผลข้อมูลและศูนย์ภูมิภาคสำหรับการรับและประมวลผลข้อมูลในรูปแบบของการทำซ้ำและการส่งข้อมูลทางวิทยาศาสตร์โดยตรง
การส่งข้อมูลอย่างต่อเนื่องไปยังจุดรับข้อมูลของภาพเมฆในท้องถิ่นและพื้นผิวโลกในช่วงที่มองเห็นและช่วง IR ของสเปกตรัมในโหมดการส่งข้อมูลโดยตรงการเปิดและการทำงานเมื่ออุปกรณ์ทั้งหมดหมุนทุกครั้งตามโปรแกรมการทำงาน
การส่งภาพเมฆในท้องถิ่นและพื้นผิวโลกในช่วงที่มองเห็นได้และช่วง IR จากยานอวกาศไปยังจุดรับข้อมูลทางอุตุนิยมวิทยาจะดำเนินการแบบเรียลไทม์
ภาพโทรทัศน์และอินฟราเรดทำให้สามารถระบุคุณลักษณะของโครงสร้างของเขตข้อมูลเมฆที่ไม่สามารถเข้าถึงได้จากการสังเกตจากเครือข่ายสถานีภาคพื้นดิน และเพื่อสรุปไม่เพียงแต่เกี่ยวกับตำแหน่งเท่านั้น แต่ยังเกี่ยวกับวิวัฒนาการของวัตถุสรุปที่เกี่ยวข้องด้วย และมวลอากาศ การใช้ข้อมูลนี้ช่วยให้คุณได้รับการพยากรณ์ที่เชื่อถือได้เป็นระยะเวลาสูงสุดหนึ่งวัน
อุปกรณ์แอกติโนเมตริกที่ออกแบบมาเพื่อวัดฟลักซ์การแผ่รังสีที่หนีออกมาจากโลกก็ได้รับการติดตั้งบนยานอวกาศด้วย
แนวโน้มการพัฒนา CMS เกี่ยวข้องกับการปรับปรุงคุณภาพการพยากรณ์อากาศ เพิ่มระยะเวลาการพยากรณ์ที่เชื่อถือได้เป็น 10 วันขึ้นไป ลดความเสียหายจากปรากฏการณ์สภาพอากาศที่เป็นอันตราย เช่น พายุไต้ฝุ่น พายุเฮอริเคน พายุ โดยการเพิ่มความแม่นยำในพื้นที่ การกระทำของปรากฏการณ์และพารามิเตอร์เหล่านี้ถูกกำหนดโดยระบุลักษณะการเกิดขึ้นและการพัฒนา
ระบบเตือนการโจมตีด้วยขีปนาวุธอวกาศ 1. การสร้างระบบเตือนการโจมตีด้วยขีปนาวุธ (MSWS) ถูกกำหนดเป็นอันดับแรกโดยความจำเป็นในการตรวจจับการยิงขีปนาวุธ (เรือบรรทุกอาวุธนิวเคลียร์) ที่มุ่งเป้าไปที่อาณาเขตของประเทศ สิ่งนี้ทำให้ผู้นำทางทหารและการเมืองชั้นนำของประเทศได้รับข้อมูลที่ทันเวลาเกี่ยวกับการเริ่มใช้อาวุธขีปนาวุธนิวเคลียร์ของศัตรู
งานหลักที่แก้ไขโดยระบบเตือนภัยล่วงหน้าในประเทศของเราและในสหรัฐอเมริกาโดยทั่วไปจะคล้ายกัน:
การตรวจจับการยิงขีปนาวุธล่วงหน้าจากอาณาเขตของศัตรูที่อาจเกิดขึ้นและพื้นที่ลาดตระเวนใต้น้ำ
การประเมินพิกัดของการยิงขีปนาวุธและการกำหนดพื้นที่ที่เป็นไปได้ที่หัวรบจะตก
ติดตามการทดสอบพิสัยและการฝึกยิงขีปนาวุธ ตลอดจนติดตามการปล่อยวัตถุอวกาศ
การควบคุมการโจมตีด้วยนิวเคลียร์ต่อเป้าหมายศัตรูที่อาจเกิดขึ้นในช่วงสงคราม
การทดสอบข่าวกรองของอาวุธนิวเคลียร์ในชั้นบรรยากาศในยามสงบ
ยานอวกาศที่เป็นส่วนหนึ่งของระบบเตือนภัยล่วงหน้าการโจมตีด้วยขีปนาวุธในประเทศนั้นปฏิบัติการในวงโคจรรูปวงรีสูงและหยุดนิ่ง ยานอวกาศ OG สามารถประกอบด้วยยานอวกาศ 4 ถึง 6 ลำในวงโคจรค้างฟ้าหรือวงรีสูง
ระบบเตือนภัยล่วงหน้าจะตื่นตัวอยู่ตลอดเวลาและควบคุมพื้นที่อันตรายจากขีปนาวุธหลักให้อยู่ภายใต้การควบคุม โลก. เหนือแต่ละพื้นที่เหล่านี้ (อาณาเขตของสหรัฐอเมริกา ยุโรป แปซิฟิก และ มหาสมุทรแอตแลนติก) มียานอวกาศ 1-2 ลำ ข้อมูลจากยานอวกาศที่ตั้งอยู่ทางซีกโลกตะวันออกจะมาถึงจุดรับข้อมูลและที่สถานีรับข้อมูลเคลื่อนที่ จากดาวเทียมอื่น - ถ่ายทอดไปยังดินแดนของรัสเซียผ่านดาวเทียม KSS
ยานอวกาศดังกล่าวให้การควบคุมดินแดนทั่วโลกอย่างต่อเนื่องเกือบตลอดเวลาในลองจิจูดและละติจูดประมาณ 80 0 ส – 800 น. เวลาที่ใช้ในการตรวจจับการยิงขีปนาวุธไม่เกิน 1 นาที และหลังจาก 2-3 นาทีข้อมูลเกี่ยวกับการยิงจะถูกส่งไปยังผู้บริโภค อุปกรณ์พิเศษที่ติดตั้งบนยานอวกาศทำให้สามารถกำหนดพิกัดของการยิงขีปนาวุธที่มีข้อผิดพลาดสูงสุด 20 กม. และตำแหน่งการตกของหัวรบ - โดยมีข้อผิดพลาดสูงสุดประมาณ 100 กม.
ทิศทางหลักในการปรับปรุงระบบเตือนภัยล่วงหน้านั้นเกี่ยวข้องกับการเพิ่มความน่าเชื่อถือในการควบคุมพื้นที่อันตรายจากขีปนาวุธ, ความเร็วในการส่งข้อมูลไปยังผู้บริโภค, ความแม่นยำในการกำหนดพิกัดของจุดปล่อยตัวและจุดลงจอดของหัวรบ
ระบบเฝ้าระวังอวกาศ 1. คุณสมบัติของการทำสงครามและการสู้รบในช่วงปลายศตวรรษที่ 20 และต้นศตวรรษที่ 21 แสดงให้เห็นว่าบทบาทและขนาดของการใช้ทรัพย์สินอวกาศในการแก้ปัญหาการเผชิญหน้าทางทหารนั้นเพิ่มขึ้นอย่างต่อเนื่อง สิ่งนี้เห็นได้จากการมีส่วนร่วมของรัฐมากกว่า 130 รัฐ กิจกรรมอวกาศ. 35 คนกำลังดำเนินโครงการเพื่อใช้ทรัพย์สินอวกาศเพื่อวัตถุประสงค์ทางการทหาร และ 17 คนมีโครงการอวกาศของตนเอง
ภารกิจหลักที่ทรัพย์สินอวกาศเริ่มถูกนำมาใช้เพื่อผลประโยชน์ด้านการป้องกันคืองานลาดตระเวนด้วยภาพถ่ายและวิทยุ ซึ่งระบบลาดตระเวนอวกาศ (SRS) ถูกสร้างขึ้น ต่อมาเมื่องานและความสามารถของยานอวกาศขยายตัว พวกเขาเริ่มถูกเรียกว่าระบบสังเกตการณ์อวกาศ (SOS)
การจำแนกประเภทของยานอวกาศสังเกตการณ์แสดงไว้ในรูปที่ 1.14
นอกเหนือจากการลาดตระเวนและการกำหนดเป้าหมายแล้ว RAC ยังแก้ปัญหาในการติดตามสนธิสัญญาลดอาวุธ ให้ข้อมูลพื้นที่แก่ผู้บังคับบัญชาและการควบคุมทุกระดับ ติดตามพื้นที่สงครามท้องถิ่นและการฝึกซ้อมหลัก ฯลฯ
ยานพาหนะสำรวจอวกาศ สอดแนมสายพันธุ์ทางเศรษฐกิจและสังคม การตรวจสอบด้านสิ่งแวดล้อมการถ่ายภาพ การสังเกตสภาพอากาศ วิทยุอินฟราเรด ภูมิประเทศ เลเซอร์ วิทยุ วิศวกรรม ธรณีวิทยา โทรทัศน์ บริการช่วยเหลือ ออปติคัลอิเล็กทรอนิกส์ รูปที่ 1.14 – การจำแนกประเภทของยานอวกาศสังเกตการณ์ ลองพิจารณา SSR สมัยใหม่บางประเภท
ระบบข่าวกรองวิทยุและอิเล็กทรอนิกส์ได้รับการออกแบบสำหรับการเฝ้าระวังทางวิทยุและอิเล็กทรอนิกส์โดยละเอียดเพื่อประโยชน์ของกระทรวงกลาโหม พวกเขาแก้ไขปัญหาต่อไปนี้:
การกำหนดตำแหน่ง ลักษณะสำคัญ และคุณลักษณะการทำงานของอุปกรณ์วิทยุอิเล็กทรอนิกส์ (RES) ของศัตรูที่อาจเกิดขึ้น
การตรวจสอบโหมดการทำงานของระบบอิเล็กทรอนิกส์ตรวจการณ์ทางอากาศและอวกาศศูนย์สื่อสารและสั่งการและควบคุมอย่างต่อเนื่องรวมถึงการเปลี่ยนแปลงสถานการณ์วิทยุอิเล็กทรอนิกส์ทั่วไปในปฏิบัติการทางทหาร
การสกัดกั้นข้อมูล telemetric ในระหว่างการทดสอบขีปนาวุธของศัตรูที่อาจเกิดขึ้น
ใน สหพันธรัฐรัสเซียเพื่อดำเนินงานเหล่านี้ จึงได้มีการสร้างระบบเฝ้าระวังด้วยวิทยุแบบครบวงจร วิธีการหลักของการใช้ระบบการต่อสู้คือการปรับใช้ล่วงหน้าและการบำรุงรักษาการทำงานอย่างต่อเนื่องของยานอวกาศ OG ที่ติดตั้งในยามสงบและยามสงครามในวงโคจรด้วยพารามิเตอร์ต่อไปนี้: ความเอียง i = 82.50;
ความสูงสูงสุด (ขั้นต่ำ) Hmax = 680 km (Hmin = 648 km);
ระยะเวลาการไหลเวียน T =97, นาที ระยะเวลารับประกันอายุการใช้งานของยานอวกาศคือ 12 เดือน
ระบบรับและวิเคราะห์สัญญาณจากแหล่งกำเนิดรังสีแอคทีฟ เช่น สัญญาณจากการสื่อสารทางวิทยุและการค้นหาทิศทางที่ความถี่สูงถึง MHz ด้วยพื้นที่รับชม 400 อุปกรณ์พิเศษของยานอวกาศทำให้มั่นใจในความแม่นยำของการอ้างอิงทางภูมิศาสตร์ของสถานีวิทยุบนพื้นสูงถึง 3-5 ม. ในเวลาเดียวกันเวลาในการประมวลผลข้อมูลด้วยวิธีออนบอร์ดคือ 180 วินาที ซึ่งทำให้มั่นใจได้ถึงประสิทธิภาพสูง
ระบบลาดตระเวนด้วยแสงและอิเล็กทรอนิกส์แบบออปติคัลได้รับการออกแบบสำหรับการเฝ้าระวังด้วยแสงอิเล็กทรอนิกส์ของกิจกรรมของกองทัพของศัตรูที่อาจเกิดขึ้น พวกเขาแก้ไขปัญหาต่อไปนี้:
การตรวจสอบสถานะและลักษณะของการทำงานของวัตถุเชิงกลยุทธ์อย่างเป็นระบบ
การชี้แจงผลลัพธ์ของการลาดตระเวนวัตถุทางยุทธศาสตร์และดินแดนตามระยะเวลาที่วางแผนไว้
การควบคุมตำแหน่งและกิจกรรมของวัตถุเคลื่อนที่ของกองกำลังโจมตีทางยุทธศาสตร์
ชี้แจงข้อมูลสถานการณ์ในพื้นที่ความขัดแย้งและสถานการณ์วิกฤติในท้องถิ่นโดยทันที
การลาดตระเวนพื้นที่ซ้อมรบของกองกำลังศัตรูที่อาจเกิดขึ้น
การตรวจสอบการจัดวางและการเคลื่อนย้ายกองทหารและอุปกรณ์ทางทหารอย่างเป็นระบบ
การควบคุมการใช้อาวุธนิวเคลียร์ในดินแดนและสิ่งอำนวยความสะดวกของศัตรู
ในการตรวจจับ ระบุ ถอดรหัส และอธิบายวัตถุเชิงกลยุทธ์ต่างๆ อุปกรณ์ลาดตระเวนเชิงแสงและอิเล็กทรอนิกส์จะต้องมีความละเอียดสูงเพียงพอ
คุณลักษณะบางอย่างได้รับในตาราง 1.1.
จากการวิเคราะห์ในตารางจะพบว่าอุปกรณ์ที่มีความละเอียด 3–5 ม. จะช่วยให้สามารถตรวจจับวัตถุทั้งหมดได้ สำหรับการถอดรหัสและคำอธิบาย จะต้องใช้อุปกรณ์ที่มีความละเอียดประมาณ 0.5 ม.
ตารางที่ 1.1 - ความละเอียดที่ต้องการของอุปกรณ์ลาดตระเวนแบบออปติคอลและออปติคอลอิเล็กทรอนิกส์, ม. การถอดรหัสการระบุการตรวจจับวัตถุ คำอธิบาย สะพาน 6 4.5 1.5 0, สถานีเรดาร์ 3 0.9 0.3 0, ศูนย์การสื่อสาร 3 1.5 0.3 0, คลังวัสดุ 1.5 0.6 0.3 0, ที่ตั้ง 6 2.1 1.2 0 หน่วยทหาร สนามบินทหาร - 90 4.5 1 อุปกรณ์ทางการทหาร 6 4.3 3 0 ฐานทัพอากาศ ปืนใหญ่และยุทธวิธี 0.9 0.6 0.15 0 ขีปนาวุธ เครื่องบิน 4.5 1.5 0.9 0 สำนักงานใหญ่ 3 1.5 0.9 0 ขีปนาวุธพื้นสู่พื้น 3 1.5 0.6 0, พื้น", การติดตั้งต่อต้านอากาศยาน, เรือขนาดกลาง 7.5 4.5 0.6 0, เรือดำน้ำบน 30 6 1.5 0, ยานพาหนะพื้นผิว 1.5 0.6 0.3 0, ทุ่นระเบิด 9 6 0.9 0, ท่าเรือ 30 15 6 แนวชายฝั่งและพื้นที่ 30 4.5 3 1, การลงจอดสะเทินน้ำสะเทินบก ถนน 9 6 1.8 0, พื้นที่เมือง 60 30 3 กลุ่มวงโคจร CS สำหรับการลาดตระเวนด้วยแสงอิเล็กทรอนิกส์ประกอบด้วยยานอวกาศ 2 4 ลำในวงโคจรขั้วโลกต่ำ (ความเอียง i = 90-1,000;
ความสูงของ perigee Hn = 300 กม. และ apogee Ha = 1,000 กม.) กลุ่มดาววงโคจรของดาวเทียมสอดแนมเรดาร์ - ของยานอวกาศ 2-4 ลำในวงโคจรวงกลม (ความเอียง i = 60-700;
ระดับความสูง H = 700-800 กม.)
ระบบลาดตระเวนอวกาศภาคพื้นดินสมัยใหม่มีความสามารถในการประมวลผลและนำเสนอข้อมูลแก่ผู้บังคับบัญชาการจัดขบวนทหารจนถึงกองพัน (กอง) ซึ่งรวมถึงจากการลาดตระเวนอวกาศทุกประเภท ยกเว้นการลาดตระเวนด้วยภาพถ่าย ภายในระยะเวลาสูงสุด 60 นาที
การวิเคราะห์ปฏิบัติการทางทหารของสหรัฐอเมริกาและพันธมิตรในอ่าวเปอร์เซียและอิรักในปี 2533-2534, 2541 และ 2546 ในคาบสมุทรบอลข่านในปี 2541 และอัฟกานิสถานในปี 2545 ทำให้เราสามารถสรุปได้ว่าระบบข้อมูลอวกาศ (ข่าวกรอง การสื่อสาร การนำทางการสำรวจ) และการสนับสนุนอุตุนิยมวิทยา) มีบทบาทสำคัญในการสนับสนุนการต่อสู้ของกองทหาร เหตุการณ์ในอ่าวเปอร์เซีย พ.ศ. 2534 (ปฏิบัติการพายุทะเลทราย) กลายเป็นประสบการณ์ครั้งแรกในการใช้ทรัพย์สินอวกาศในทุกขั้นตอนของการปฏิบัติการ ข้อมูลมากถึง 90% เกี่ยวกับกองทัพอิรักมาจากกองกำลังพันธมิตรร่วมจากระบบอวกาศเพื่อวัตถุประสงค์ต่างๆ ในระหว่างการสู้รบ OG ประกอบด้วยยานอวกาศ 90 ลำเข้ามาเกี่ยวข้อง ภารกิจหลักที่ได้รับมอบหมายให้กับหน่วยควบคุมของคำสั่งอวกาศในพื้นที่ขัดแย้งนั้นเกี่ยวข้องกับการลาดตระเวน การสื่อสาร การนำทาง การสนับสนุนภูมิประเทศและภูมิศาสตร์และอุตุนิยมวิทยา และการประเมินผลการทำลายเป้าหมายของศัตรู บทบาทที่สำคัญที่สุดคือทรัพย์สินการลาดตระเวนอวกาศของสหรัฐฯ ในช่วงเริ่มต้นของการสู้รบ ยานอวกาศลาดตระเวน OG ได้รวมยานอวกาศไว้ด้วย โดย 4 ลำเป็นสายพันธุ์ (ออปติคอลและเรดาร์) และที่เหลือเป็นการลาดตระเวนทางวิทยุและอิเล็กทรอนิกส์ การใช้การลาดตระเวนอวกาศทำให้สามารถเปิดเผยสิ่งอำนวยความสะดวกของกองกำลังภาคพื้นดิน ระบบฐานทัพอากาศ หน่วยขีปนาวุธ และสิ่งอำนวยความสะดวกที่มีศักยภาพทางเศรษฐกิจและทางการทหารได้เกือบทั้งหมด
ปฏิบัติการทางทหารในคาบสมุทรบอลข่าน (พ.ศ. 2541) และอิรัก (พ.ศ. 2546) มาพร้อมกับการใช้ยานอวกาศประมาณ 120 ลำของสหรัฐอเมริกาและพันธมิตรเพื่อวัตถุประสงค์ต่างๆ ระบบการสื่อสารอวกาศถูกใช้โดยทุกระดับการบังคับบัญชา รวมถึงกองพัน (กอง), เครื่องบินทิ้งระเบิดทางยุทธศาสตร์ส่วนบุคคล, เครื่องบินลาดตระเวน, เครื่องบินพิสัยไกล การตรวจจับเรดาร์อ๊าคส์ เรือรบ มีการติดตั้งสถานีระบบสื่อสารอวกาศมากกว่า 500 แห่งในเขตความขัดแย้ง นอกจากนี้ยังใช้ระบบการสื่อสารอวกาศระหว่างประเทศ Intelsat
ระบบอุตุนิยมวิทยาให้ภาพพื้นผิวโลกด้วยความละเอียดประมาณ 600 ม. และการศึกษาสภาพบรรยากาศเพื่อรวบรวมพยากรณ์อากาศระยะสั้นและระยะกลางในพื้นที่ปฏิบัติการทางทหารซึ่งทำให้สามารถ จัดทำตารางเที่ยวบินที่วางแผนไว้และแก้ไขอย่างรวดเร็ว
กองกำลังผสมได้ใช้สนามนำทางที่สร้างโดยระบบนำทางในอวกาศ Navstar อย่างกว้างขวาง การใช้ข้อมูลการนำทางจาก CNS โดยระบบควบคุมขีปนาวุธล่องเรือทำให้ลดการเบี่ยงเบนวงกลมที่เป็นไปได้จาก 150 ม. เป็น 15 ม. เช่น ความแม่นยำเพิ่มขึ้น 10 เท่า
ประสบการณ์ของการใช้ระบบข้อมูลอวกาศภายในประเทศในระหว่างการปฏิบัติการต่อต้านการก่อการร้ายในเชชเนียยังยืนยันถึงความสำคัญของการสนับสนุนอวกาศสำหรับการปฏิบัติการทางทหารของกองทหาร
ใน ปีที่ผ่านมาโดยเฉพาะอย่างยิ่งในช่วงที่เกิดความขัดแย้ง ได้มีการสร้างระบบข่าวกรองและอาวุธข้ามสายพันธุ์ในประเทศของเราและสหรัฐอเมริกา
แนวคิดของการใช้ระบบลาดตระเวนและทำลายการบินร่วมกันและเชื่อมโยงกันในเวลาและพื้นที่ วิธีการลาดตระเวนอวกาศที่รวมไว้ในระบบเดียวถือเป็นขั้นตอนใหม่เชิงคุณภาพในการพัฒนาระบบลาดตระเวนและทำลายล้างที่มีความแม่นยำสูง
การบูรณาการยานอวกาศข้อมูลกับระบบอาวุธ การใช้ยานอวกาศพลเรือนในการแก้ปัญหาทางทหาร และในทางกลับกัน (ยานอวกาศแบบใช้คู่) มุ่งเน้นไปที่การสร้างยานอวกาศขนาดเล็กและขนาดเล็กพิเศษ วิธีการยิงที่คล่องแคล่วสูงมีการใช้มากขึ้นใน การจัดองค์กรและการดำเนินการต่อสู้ด้วยอาวุธ
ภารกิจหลักประการหนึ่งที่ CSR ทางการทหารยุคใหม่ต้องจัดให้มีคือการสนับสนุนข้อมูลจากอวกาศสำหรับการดำเนินการของกองทัพ สิ่งนี้แนะนำสองทิศทางต่อไปนี้สำหรับการพัฒนา CS
ทิศทางแรกคือการสร้าง CSR ที่มีลักษณะเชิงกลยุทธ์ในการปฏิบัติงานสูง (ความแม่นยำ ความละเอียด ผลผลิต ความอยู่รอด ฯลฯ)
ทิศทางที่สองคือการนำข้อมูลอวกาศมาสู่ฝ่ายบริหารระดับล่างและในอนาคตให้กับทหารทุกคน
พื้นฐานทางเทคนิคของทิศทางแรกคือการปรับปรุงองค์ประกอบสำคัญของระบบอวกาศ - พื้นที่ที่ซับซ้อน
ให้เราพิจารณาวัตถุประสงค์และองค์ประกอบของ CC โดยย่อ
2 วัตถุประสงค์และองค์ประกอบของ ROCKET และ SPACE COMPLEX Space complex: วัตถุประสงค์และองค์ประกอบของส่วนหลัก 2. space complex เป็นชุดของวิธีการทางเทคนิคเกี่ยวกับวงโคจรและภาคพื้นดินที่เชื่อมโยงกันตามหน้าที่ซึ่งออกแบบมาเพื่อแก้ไขปัญหาในอวกาศและจากอวกาศซึ่งเป็นส่วนหนึ่งของ ระบบอวกาศ
CC ได้รับการออกแบบมาเพื่อแก้ไขปัญหาต่อไปนี้:
1) การเตรียมและปล่อยยานอวกาศขึ้นสู่วงโคจรที่กำหนด
2) การยอมรับยานอวกาศเพื่อการควบคุมตามข้อมูล telemetric เกี่ยวกับการโต้ตอบของพารามิเตอร์วงโคจรกับค่าที่ระบุและสถานะของระบบออนบอร์ดของยานอวกาศ
๓) การนำยานอวกาศเข้าสู่ปฏิบัติการบินและการรื้อถอนยานอวกาศ
4) การควบคุมการบินในวงโคจรของยานอวกาศติดตามสภาพและประเมินคุณภาพการทำงานของระบบออนบอร์ดของยานอวกาศในการบิน
5) ปฏิบัติงานเป้าหมายในพื้นที่และจัดเตรียมข้อมูลเพื่อจัดส่งไปยังผู้บริโภค
6) การตรวจจับและบำรุงรักษาองค์ประกอบของยานอวกาศที่กลับมาจากวงโคจรรวมถึงชิ้นส่วนที่ถอดออกได้ของยานปล่อย
7) รักษาก๊าซไอเสียของยานอวกาศให้อยู่ในองค์ประกอบที่ต้องการ
ตามที่ระบุไว้ข้างต้น QC เป็นส่วนสำคัญของ CC
โครงสร้างของสเปซคอมเพล็กซ์แสดงในรูปที่ 2.1
KK KPO OG KA RKK NKU รูปที่ 2.1 – โครงสร้างของคอมเพล็กซ์อวกาศ คอมเพล็กซ์อวกาศประกอบด้วยองค์ประกอบ (ส่วนประกอบ) ที่ช่วยให้สามารถแก้ไขปัญหาข้างต้นได้ องค์ประกอบที่สำคัญที่สุดของพื้นที่ที่ซับซ้อนคือยานอวกาศ OG ซึ่งเป็นชุดยานอวกาศที่ปฏิบัติการในวงโคจรและมีวัตถุประสงค์เพื่อแก้ไขงานที่ได้รับมอบหมายภายในยานอวกาศ องค์ประกอบของ OG อาจรวมถึงยานอวกาศหนึ่งลำขึ้นไป
ตามกฎแล้วชื่อของยานอวกาศที่รวมอยู่ในยานอวกาศนั้นถูกกำหนดให้กับยานอวกาศนั้นเอง ตัวอย่างเช่น ยานอวกาศดาวหาง และยานอวกาศดาวหาง
การควบคุมการบินในวงโคจรของยานอวกาศ (หรือหน่วยการโคจร (OB) ซึ่งรวมถึงยานอวกาศและหน่วยการโคจร) การดำเนินการสื่อสารกับยานอวกาศ และการทำนายตำแหน่งลงจอดสำหรับยานพาหนะและแคปซูลที่ลงมานั้นดำเนินการโดยการควบคุมภาคพื้นดิน ซับซ้อน. NKU ของยานอวกาศต่างๆ เป็นส่วนหนึ่งของศูนย์ควบคุมอัตโนมัติภาคพื้นดิน (GACS) ดังนั้น NAKU จึงควบคุมยานอวกาศทั้งหมด (วัตถุประสงค์ทางทหาร การวิจัย และเศรษฐกิจและสังคม) ในทุกขั้นตอนของการบิน NAKU รวมถึงวิธีการเคลื่อนที่และแบบอยู่กับที่ในการแลกเปลี่ยนซอฟต์แวร์คำสั่ง ข้อมูลการวัดและส่งข้อมูลทางไกลและวิถีกับยานอวกาศ วิธีการสื่อสาร ตลอดจนวิธีการรวบรวมและประมวลผลข้อมูลอัตโนมัติด้วยการสนับสนุนทางคณิตศาสตร์และข้อมูลที่จำเป็น สิ่งอำนวยความสะดวกของ NAKU ตั้งอยู่ที่ป้อมบัญชาการกลาง เสาควบคุมกลางสำหรับยานอวกาศประเภทต่างๆ ศูนย์ขีปนาวุธ ศูนย์ประมวลผลข้อมูลทางไกล และศูนย์บัญชาการและการวัด เพื่อควบคุมการบินของยานอวกาศที่มีคนขับ จึงได้มีการนำศูนย์ควบคุมการบินเข้ามาใน NAKU
พื้นฐานสำหรับการควบคุมการบินของยานอวกาศคือภารกิจการบินซึ่งกำหนดลำดับและลำดับการทำงานของระบบออนบอร์ดของยานอวกาศโดยคำนึงถึงความต้องการที่เกิดขึ้นใหม่ของการเปลี่ยนแปลงการปฏิบัติงาน งานควบคุมการบินของยานอวกาศสามารถแยกแยะได้สามกลุ่ม:
1) การแก้ไขวงโคจรตามข้อมูลวิถีที่เข้ามา
2) ดำเนินการประลองยุทธ์ยานอวกาศตามภารกิจการบิน
3) การตรวจสอบการทำงานของระบบยานอวกาศออนบอร์ดโดยใช้ข้อมูลทางไกล
การค้นหา การตรวจจับ การลงจอดและการบำรุงรักษาหลังการบินของวัตถุที่ส่งคืนจากวงโคจร (ยานลงมา (DS), แคปซูล, ขั้นตอนของยานปล่อยที่นำกลับมาใช้ใหม่, ระยะบน ฯลฯ ) และการส่งมอบให้กับผู้บริโภคนั้นดำเนินการโดยการลงจอดและการบำรุงรักษา ซับซ้อน. ควรสังเกตว่า KPO ไม่ได้เป็นส่วนหนึ่งของยานอวกาศทั้งหมด แต่เฉพาะยานอวกาศที่มีองค์ประกอบที่ส่งคืนจากวงโคจรเท่านั้น
วัตถุประสงค์หลักของ KPO คือ:
การค้นหาและตรวจจับวัตถุที่ส่งคืน
เปิดยานพาหนะ นำภาชนะ แคปซูล บล็อก และวัตถุอื่น ๆ ออกจากพวกเขาด้วยสื่อบันทึก
การบำรุงรักษาสิ่งของที่ส่งคืนหลังการบิน
การขึ้นฝั่งของลูกเรือจาก SA ของยานอวกาศและการปฐมพยาบาล (ถ้าจำเป็น)
การบรรทุกยานพาหนะขึ้นรถและขนส่งไปยังจุดหมายปลายทาง
KPO รวมถึงเครื่องบินที่มีอุปกรณ์พิเศษ เฮลิคอปเตอร์ และอื่นๆ ยานพาหนะอุปกรณ์เฝ้าระวังในช่วงที่มองเห็นและอินฟราเรดและอุปกรณ์วิทยุสำหรับรับและส่งข้อมูล
การดำเนินงานของสิ่งอำนวยความสะดวกทางเทคนิคของ KPO ดำเนินการโดยบุคลากรของหน่วยค้นหาพิเศษและเขตการปกครองของคอสโมโดรม
ศูนย์จรวดและอวกาศเป็นแนวทางในการแก้ปัญหาการปฏิบัติงานภาคพื้นดินของยานอวกาศ ยานอวกาศ และร่างกายส่วนบน สิ่งสำคัญคือการเตรียมยานส่งยานอวกาศสำหรับการปล่อยและการส่งยานอวกาศขึ้นสู่วงโคจรที่กำหนด ในแง่ขององค์ประกอบเชิงปริมาณของยานอวกาศที่รวมอยู่ในองค์ประกอบและความหลากหลายของงานที่ต้องแก้ไข RSC ครอบครองสถานที่พิเศษในโครงสร้างของพื้นที่ที่ซับซ้อน
ควรพิจารณาองค์ประกอบและวัตถุประสงค์ขององค์ประกอบหลักของ RSC อย่างละเอียดเนื่องจากเป็นพื้นฐานของวัตถุของโครงสร้างอวกาศของคอสโมโดรม
2.2 จรวดและอวกาศคอมเพล็กซ์: องค์ประกอบและวัตถุประสงค์ขององค์ประกอบหลัก จรวดและอวกาศคอมเพล็กซ์ได้รับการออกแบบมาเพื่อเตรียมยานปล่อย ยานอวกาศ ร่างกายส่วนบนสำหรับการใช้งานตามวัตถุประสงค์ และปล่อยยานอวกาศ (OB) ขึ้นสู่วงโคจรโลกต่ำ
การวิเคราะห์ฟังก์ชันที่ดำเนินการโดย RKK แสดงให้เห็นว่าฟังก์ชันทั้งหมดสามารถแบ่งออกเป็นสองกลุ่ม:
1) การนำระบบออนบอร์ดของยานปล่อย ยานอวกาศ และบูสเตอร์เข้าสู่สถานะที่ช่วยให้ยานปล่อยยานในเวลาที่กำหนด วางยานอวกาศขึ้นสู่วงโคจรที่กำหนด และรับรองการทำงานของยานอวกาศที่กำลังบิน
2) ตรวจสอบสภาพทางเทคนิคของระบบออนบอร์ดของ LV, ยานอวกาศ, RB และกำจัดความผิดปกติที่ตรวจพบ
เทคโนโลยีของงานทั้งหมดที่ดำเนินการระหว่างการทำงานของ RSC นั้นถูกกำหนดโดยการออกแบบของ KSr ปริมาณและระยะเวลาของกระบวนการเตรียมยานปล่อยยานอวกาศและลำตัวส่วนบน ระดับการทำงานอัตโนมัติและการประมวลผลผลลัพธ์บ่งบอกถึงความเป็นเลิศในการปฏิบัติงานของยานอวกาศ เมื่อใช้งาน RSC งานต่อไปนี้จะได้รับการแก้ไข:
การขนส่งยานปล่อย ยานอวกาศ ร่างกายส่วนบน และส่วนประกอบจากผู้ผลิตหรือคลังแสงไปยังคอสโมโดรม
การจัดเก็บ LV, ยานอวกาศ, RB และส่วนประกอบ
การเตรียม LV, ยานอวกาศ, RB ที่ศูนย์เทคนิคและการประกอบ ILV
การขนส่งเครื่องยิงจรวดไปยังศูนย์ปล่อยจรวด
การเตรียมยานปล่อยยานเพื่อการปล่อยตัวที่จุดปล่อยยาน การเติมเชื้อเพลิงยานปล่อยยาน (และยานส่วนบน) ของยานอวกาศ การปล่อยยานปล่อยยาน
RSC ประกอบด้วยจรวดอวกาศ (ระหว่างปฏิบัติการภาคพื้นดิน) เทคนิค คอมเพล็กซ์การยิง เช่นเดียวกับชุดเครื่องมือวัด การรวบรวมและการประมวลผลข้อมูล และคอมเพล็กซ์สำหรับการตกของชิ้นส่วนที่ถอดออกได้ของ RKN (KPOCH)
คอมเพล็กซ์จรวดและอวกาศนั้นเป็นสากลและเป็นส่วนหนึ่งของคอมเพล็กซ์อวกาศต่างๆ ลักษณะทางเทคนิคของ RKK จะถูกกำหนดโดยยานปล่อย ชื่อของยานปล่อยตัวเป็นชื่อของ RKK เอง ตัวอย่างเช่น รถเปิดตัว Proton และ Proton RSC
โครงสร้างของ RKK แสดงไว้ในรูปที่ 2.2
KSISO ได้รับการออกแบบมาเพื่อรับประกันการควบคุมพารามิเตอร์ของ ILV และส่วนประกอบระหว่างการเตรียมการที่ศูนย์เทคนิคและ SC รวมถึงระหว่างการบินของ ILV ที่จุดปล่อย การประมวลผล การจัดทำเอกสาร และการกระจายข้อมูลระหว่างผู้ใช้ หน้าที่หลักของ KSISO คือ:
การเชื่อมโยงการวัดเข้ากับมาตราส่วนเวลาเดียว
การรวบรวม การประมวลผล การแสดง และเอกสารข้อมูลเกี่ยวกับพารามิเตอร์ของระบบ ILV บน TC และ SK โดยอัตโนมัติ
การวัดวิถีภายนอกในระยะแอคทีฟของการบิน ILV (ที่จุดปล่อยตัว) โดยใช้สถานีเรดาร์
รับสัญญาณวิทยุจากระบบการวัดทางไกล RKN
RKK RKN TC SK KSISO KPOCH TC RN TC KA TC RB TC KGCH TC RKN รูปที่ 2.2 – โครงสร้างของจรวดและศูนย์อวกาศที่ตรวจสอบสภาพและประเมินคุณภาพการทำงานของระบบออนบอร์ด RKN ในการบิน
รับสัญญาณเกี่ยวกับการแยกยานอวกาศออกจากระยะสุดท้ายของยานปล่อยหรือระยะบน
คาดการณ์ตำแหน่งการชนของส่วนที่แยกออกจากกันของยานปล่อยตัวในพื้นที่ปะทะ
อุปกรณ์ KSISO ตั้งอยู่ที่ศูนย์เทคนิคและศูนย์ปล่อยตัว ศูนย์กลางคอมพิวเตอร์ของคอสโมโดรม รวมถึงในโครงสร้างของจุดตรวจวัด (IP) ซึ่งตั้งอยู่ใกล้กับศูนย์ปล่อยตัวและตามเส้นทางการบิน RKN จำนวนและตำแหน่งที่ต้องการถูกกำหนดโดยเงื่อนไขสำหรับการตรวจสอบอย่างต่อเนื่องของการบินของยานปล่อยจรวด และการได้รับข้อมูลตลอดระยะการปล่อยยานทั้งหมดจนถึงการแยกยานอวกาศ (OB) ออกจากยานปล่อย ในบางกรณี KIC สามารถทำหน้าที่ของ IP ได้หากเส้นทางการบินของยานปล่อยผ่านภายในโซนการมองเห็น จุดตรวจวัดและศูนย์คอมพิวเตอร์จะรวมกันเป็นศูนย์การวัดคอสโมโดรม (ICC)
IP ทั่วไปประกอบด้วย โพสต์คำสั่งอุปกรณ์สำหรับระบบเวลารวม วิธีการวัดวิถีและการวัดระยะไกล วิธีการสื่อสารกับลูกเรือของยานอวกาศที่มีคนขับ วิธีการทางอิเล็กทรอนิกส์ ก่อนการรักษาข้อมูล ฯลฯ จุดวัดจะส่งข้อมูลผ่านช่องทางการสื่อสารไปยังศูนย์คอมพิวเตอร์ที่ประมวลผลข้อมูล
RLV KPOCH ได้รับการออกแบบมาเพื่อค้นหาองค์ประกอบที่แยกออกจาก ILV (แฟนๆ ของแฟริ่งศีรษะ ระยะการปล่อยยาน อะแดปเตอร์ ฯลฯ) สำรวจสถานที่ที่พวกมันตกลงมา รวบรวมและกำจัดพวกมัน ตลอดจนกำจัด ผลที่ตามมาของการปนเปื้อนในพื้นที่ที่มีส่วนประกอบเชื้อเพลิงจรวดที่เหลืออยู่ในถังขั้น
การฉีดยานอวกาศขึ้นสู่วงโคจรใกล้โลกโดยใช้ยานปล่อยหลายระดับจำเป็นต้องแยกพื้นที่ขนาดใหญ่เพียงพอของภูมิประเทศที่ตั้งอยู่ตามเส้นทางบินของยานปล่อยสำหรับพื้นที่ปะทะของชิ้นส่วนที่ถอดออกได้ของยานปล่อย ตามกฎแล้ว พื้นที่ที่มีความเข้มต่ำจะถูกใช้เป็นพื้นที่กระแทก กิจกรรมทางเศรษฐกิจ. พื้นที่เหล่านี้ในรูปแบบของวงรีหรือรูปหลายเหลี่ยมครอบครองพื้นที่สำคัญในดินแดนของรัสเซีย, คาซัคสถาน, อุซเบกิสถาน, เติร์กเมนิสถานตลอดจนในน่านน้ำของ Bely และ ทะเลเรนท์(สำหรับคอสโมโดรมภายในประเทศ) เมื่อเข้าสู่ชั้นบรรยากาศที่หนาแน่นหรือตรงไปยังจุดปะทะ ชิ้นส่วนที่ถอดออกได้ของเครื่องยิงจรวดจะถูกทำลาย ซึ่งเป็นผลมาจากการที่จุดตกกระทบสัมผัสกับผลกระทบที่เป็นอันตรายต่อสิ่งแวดล้อมจากปัจจัยหลายประการ ซึ่งปัจจัยที่สำคัญที่สุดก็คือ สิ่งสำคัญคือช่องแคบ SRT และการปนเปื้อนของพื้นผิวโลกด้วยชิ้นส่วนของชิ้นส่วนที่ถอดออกได้ของเครื่องยิงจรวด จนกระทั่งเมื่อไม่นานมานี้ การจัดสรรที่ดินสำหรับพื้นที่ฤดูใบไม้ร่วงไม่พบปัญหาร้ายแรง ขนาดของพื้นที่รับแรงกระแทกถูกกำหนดตามหลักการที่ว่าชิ้นส่วนที่ถอดออกได้เกือบทั้งหมดจะตกลงไปในพื้นที่นั้น อย่างไรก็ตาม ในช่วงไม่กี่ปีที่ผ่านมาได้รับความสนใจเพิ่มขึ้นจากหน่วยงานท้องถิ่นและประชากรที่อาศัยอยู่ใกล้กับพื้นที่ฤดูใบไม้ร่วงในสถานการณ์ด้านสิ่งแวดล้อมในพื้นที่เหล่านี้ ดังนั้นปัญหาในการกำจัดชิ้นส่วนที่ถอดออกได้ของเครื่องยิงจรวดที่ตกลงมาจึงเป็นเรื่องเร่งด่วนซึ่งการแก้ปัญหานั้นต้องใช้กรอบทางเทคนิควิธีการและกฎหมายที่เหมาะสม
องค์ประกอบที่สำคัญที่สุดของ RSC ซึ่งรับประกันการแก้ปัญหาการปฏิบัติงานภาคพื้นดินของ LV, SC, RB จนถึงการเปิดตัว RLV คือคอมเพล็กซ์ด้านเทคนิคและการเปิดตัวซึ่งโดยพื้นฐานแล้วจะเป็นพื้นฐานของโครงสร้างพื้นฐานของอวกาศ สิ่งอำนวยความสะดวกของคอสโมโดรม ความจำเป็นสำหรับ TC และ SC เกิดจากการนำกลยุทธ์สองขั้นตอนมาใช้ในการเตรียม RKN เพื่อใช้งาน อุปกรณ์เทคโนโลยีของคอมเพล็กซ์เหล่านี้เป็นพื้นฐานในการดำเนินการภาคพื้นดินของ ILV ลักษณะโดยละเอียด TC, SK และ OKI อื่นๆ จะได้รับในบทที่ 2
การจำแนกประเภทของ RKK ดำเนินการตามกฎตามเกณฑ์ต่อไปนี้:
ก) คลาส RN:
RSC สำหรับการเปิดตัวยานพาหนะระดับเบา (RSC "Cosmos", "Cyclone", "Start", "Rokot");
RSC สำหรับการเปิดตัวยานยนต์ระดับกลาง (RSC Soyuz, Molniya, Zenit);
RSC สำหรับการเปิดตัวยานพาหนะสำหรับงานหนัก (RSC Proton, Angara)
RSC สากลสำหรับการเปิดตัว LV ของคลาสต่างๆ (RSC ที่ออกแบบมาเพื่อการเปิดตัว LV ของตระกูล Angara ซึ่งควรครอบคลุมคลาส LV จากเบาไปหนัก)
RSC สำหรับการปล่อยยานพาหนะที่มีน้ำหนักมากเป็นพิเศษ (RSC Energia ปัจจุบันไม่ได้ใช้งาน);
b) สภาพแวดล้อมและที่ตั้ง:
ภาคพื้นดิน (Rocket and Space Corporation Start, Soyuz);
ใต้ดินหรือของฉัน (Rocket and Space Corporation "Rokot");
พื้นผิว (RSC "Sea Launch");
เรือดำน้ำ (ขึ้นอยู่กับยานยิงประเภท Shtil ของเรือดำน้ำนิวเคลียร์);
ค) ความคล่องตัว:
เครื่องเขียน (RSC Kosmos, Molniya);
มือถือ (RSC "เริ่ม", "Shtil")
RSC ดำเนินการโดยองค์กรปฏิบัติการของ Federal Space Agency และกระทรวงกลาโหมของสหพันธรัฐรัสเซีย
ส่วนประกอบทั้งหมดที่กล่าวมาข้างต้นของ RSC ได้รับการออกแบบมาเพื่อให้แน่ใจว่ามีการปล่อยจรวดอวกาศซึ่งเป็นองค์ประกอบที่สำคัญที่สุดของ RSC ในระบบปฏิบัติการ RSC RLV จะเป็นอ็อบเจ็กต์ของการดำเนินการ ILV (รูปที่ 2.3) รวมถึงยานปล่อยและส่วนหัวอวกาศ (SCH) ซึ่งประกอบด้วยยานอวกาศและส่วนบน (ส่วนประกอบของยานอวกาศ) และหน่วยป้องกันการประกอบ (APB) ซึ่งได้รับการออกแบบ สำหรับการเชื่อมต่อเชิงสร้างสรรค์และการทำงานของยานอวกาศ ( และ RB) กับยานปล่อยและการป้องกันจากโหลดแอโรไดนามิกในชั้นบรรยากาศที่หนาแน่น ส่วนประกอบหลักของ SZB คือแฟริ่งส่วนหัว (GO) และส่วนเปลี่ยนผ่าน (TC)
RKN RN KGCH SC RB SZB OB PO GO รูปที่ 2.3 – องค์ประกอบของจรวดอวกาศ พูดอย่างเคร่งครัด SZB ไม่ควรเป็นส่วนหนึ่งของหัวรบอวกาศ เนื่องจากมันถูกทิ้งก่อนที่ยานอวกาศ (OB) จะถูกปล่อยสู่วงโคจร
ยานปล่อยจรวดซึ่งมีจุดประสงค์เพื่อส่งยานอวกาศที่มีคนขับขึ้นสู่วงโคจรนั้น มาพร้อมกับระบบช่วยเหลือฉุกเฉิน ซึ่งออกแบบมาเพื่อช่วยเหลือลูกเรือในกรณีที่เกิดอุบัติเหตุจากยานปล่อยจรวด เนื่องจากอุบัติเหตุจากการปล่อยยานพาหนะอาจมาพร้อมกับการระเบิด ระบบจึงต้องการประสิทธิภาพสูงและต้องเคลื่อนย้ายลูกเรือออกไปให้อยู่ในระยะที่ปลอดภัยโดยทันที เมื่อระบบช่วยเหลือฉุกเฉินถูกกระตุ้น เมื่อเครื่องยิงจรวดอยู่บนเครื่องยิง ยานร่อนลงซึ่งใช้เครื่องยนต์จรวดเชื้อเพลิงแข็ง จะถูกแยกออกจากยานอวกาศด้วยความเร่ง 50-150 ม./วินาที และยกขึ้นสูง 1 -1.5 กม. เพียงพอต่อการเปิดใช้งานระบบลงจอด .
กระบวนการปฏิบัติการภาคพื้นดินของเครื่องยิงจรวดและส่วนประกอบต่าง ๆ นั้นมีสาเหตุหลักมาจากพวกเขา คุณสมบัติการออกแบบซึ่งจำเป็นต้องมีกระบวนการที่ค่อนข้างยาวและต้องใช้แรงงานคนมากในการเตรียม ILV สำหรับการเปิดตัว ด้านล่างนี้เราจะพิจารณาคุณสมบัติของยานปล่อย ยานอวกาศ และลำตัวส่วนบน ซึ่งเป็นตัวกำหนดเทคโนโลยีของปฏิบัติการภาคพื้นดิน
การปฏิบัติงานภาคพื้นดินของยานอวกาศ ยานอวกาศ และลำตัวส่วนบนจะเป็นตัวกำหนดผลลัพธ์ของการใช้งานตามวัตถุประสงค์ หากในระหว่างขั้นตอนนี้ มาตรการที่วางแผนไว้ไม่ครบถ้วนหรือข้อบกพร่องในระบบยานปล่อย ยานอวกาศ และบูสเตอร์พลาดไป สิ่งนี้อาจนำไปสู่ความล้มเหลวในภารกิจการบินอวกาศให้เสร็จสิ้น จะต้องมอบยานโคจรและยานปล่อย ระดับสูงคุณสมบัติดังกล่าวซึ่งไม่จำเป็นสำหรับการใช้งานตามวัตถุประสงค์ แต่จำเป็นสำหรับการปฏิบัติงานภาคพื้นดิน โดยเฉพาะอย่างยิ่งคุณสมบัติของ LV, SC, RB เช่น ความสามารถในการจัดเก็บ การบำรุงรักษา การเคลื่อนย้าย และอื่นๆ อีกมากมายจะเกิดขึ้นได้เฉพาะในระหว่างการปฏิบัติการภาคพื้นดิน และในระหว่างการปฏิบัติการบิน สิ่งเหล่านี้ไม่จำเป็นอีกต่อไป และความน่าเชื่อถือและความทนทานเป็นสำคัญ สถานการณ์เหล่านี้เป็นตัวกำหนดลักษณะของยานปล่อย ยานอวกาศ และร่างกายส่วนบนเป็นวัตถุปฏิบัติการ
ส่วนที่ 2 พื้นฐานของจรวดปล่อย หน่วยบน และยานพาหนะอวกาศ 3 ยานพาหนะเปิดตัว ข้อมูลทั่วไปเกี่ยวกับยานปล่อย 3 ดาวเทียมโลกดวงแรกของโลกถูกปล่อยโดยขีปนาวุธข้ามทวีป R-7 (ICBM) เมื่อวันที่ 4 ตุลาคม พ.ศ. 2500 และสำหรับการบินของนักบินอวกาศคนแรกสู่อวกาศ (12 เมษายน 2504) จำเป็นต้องสร้างยานยิง Vostok โดยเพิ่มด่านบน Block E ให้กับ R-7 ICBM
สิ่งนี้เริ่มต้นขั้นตอนของการใช้ ICBM เป็นขั้นล่างของยานพาหนะที่สร้างขึ้น - "Voskhod", "Soyuz", "Molniya", "Cosmos", "Cyclone", "Proton" ชาวอเมริกันก็เดินตามเส้นทางเดียวกัน นักบินอวกาศคนแรกของพวกเขา จอห์น เกลนน์ ถูกส่งขึ้นสู่อวกาศเมื่อวันที่ 20 กุมภาพันธ์ พ.ศ. 2505 โดยใช้ Atlas ICBM นอกจากนี้ เนื่องจากสภาวะการโหลด Atlas ICBM ที่รุนแรงยิ่งขึ้น John Glenn จึงประสบปัญหาการบรรทุกเกินพิกัดที่ OUT มากเป็นสองเท่าของ Yuri Gagarin
ขนาดของโครงการอวกาศจำเป็นต้องมีการพัฒนายานส่งจรวดเพื่อแก้ไขปัญหาเฉพาะโดยเฉพาะ การบินโดยคนขับไปยังดวงจันทร์เป็นการเริ่มต้นการสร้างยานปล่อย N-1 ที่มีเอกลักษณ์เฉพาะในประเทศของเราและ Saturn-5 ในสหรัฐอเมริกา นี่เป็นความก้าวหน้าอีกประการหนึ่งของเทคโนโลยีใหม่ ในการพัฒนาวัสดุใหม่ ในด้านอิเล็กทรอนิกส์ (คอมพิวเตอร์ดิจิทัลเครื่องแรกของโลกที่ใช้บนดาวเสาร์) ในการแก้ปัญหาทางวิศวกรรมขนาดใหญ่ใหม่
จุดสุดยอดของการพัฒนาผู้ให้บริการแบบใช้แล้วทิ้งแบบพิเศษในสหภาพโซเวียตคือยานปล่อยของเซนิต ด้วยความช่วยเหลือนี้ จึงเป็นไปได้ที่จะสร้างกลุ่มดาวในวงโคจรของยานอวกาศได้ในเวลาอันสั้น เพื่อจุดประสงค์นี้ ได้มีการพัฒนาศูนย์ปล่อยจรวดแบบอัตโนมัติเต็มรูปแบบ ซึ่งช่วยให้สามารถเติมเชื้อเพลิงและปล่อยยานปล่อยได้ภายในเวลาไม่กี่ชั่วโมง งานดังกล่าวเกินความสามารถของชาวอเมริกันและพวกเขาก็ไม่ให้อภัยเราในเรื่องนี้เช่นกัน
ในช่วงทศวรรษที่แปดสิบของศตวรรษที่ผ่านมา การนำแนวคิดของระบบอวกาศที่ใช้ซ้ำได้ (ISS) ได้เริ่มขึ้นในทางปฏิบัติ ในสหรัฐอเมริกา มีการสร้างยานส่งกระสวยอวกาศที่สามารถกู้ได้บางส่วน (เปิดตัวครั้งแรกในปี พ.ศ. 2524) และในสหภาพโซเวียต มีการสร้างยานส่งกระสวยอวกาศเอเนอร์เจีย-บูรัน (พ.ศ. 2531) การพัฒนาผลิตภัณฑ์เหล่านี้เกี่ยวข้องกับการปฏิวัติทางเทคโนโลยีอีกครั้งทั้งในสหรัฐอเมริกาและที่นี่ นี่คือสิ่งที่อธิบายถึงต้นทุนที่สูงเป็นพิเศษของ ISS แม้แต่สหรัฐอเมริกาก็ไม่สามารถรับมือกับการกดขี่ทางการเงินได้ แม้ว่านักวิทยาศาสตร์และวิศวกรราคาถูกจากรัสเซียที่ล้มละลายจะหลั่งไหลเข้ามาเป็นจำนวนมาก แต่ก็ไม่สามารถลดต้นทุนของโครงการกระสวยอวกาศให้อยู่ในขนาดที่ยอมรับได้ และโครงการดังกล่าวก็ปิดตัวลงในปี 2554
ควรหาการลดต้นทุนการปล่อยยานอวกาศด้วยการลดความซับซ้อนของการนำแนวคิดที่เพิ่มประสิทธิภาพของยานปล่อยยานอวกาศมาใช้ และมีแนวคิดเหล่านี้มากมาย และเราจะพูดถึงแนวคิดเหล่านี้เมื่อพิจารณาถึงการออกแบบยานปล่อยตัว
องค์ประกอบทั่วไปของยานปล่อยแสดงไว้ในรูปที่ 3.1
รูปที่ 3.1 – องค์ประกอบทั่วไปของยานปล่อยตัว ตัวถังได้รับการออกแบบให้เชื่อมต่อส่วนประกอบทั้งหมดของยานปล่อยตัวเป็นอันเดียว และสร้างรูปลักษณ์ตามหลักอากาศพลศาสตร์ ในอนาคต มันอาจจะคล้ายกับยานปล่อยจรวดดังแสดงในรูปที่ 3.2 แม้ว่าจรวดนี้เองจะมีองค์ประกอบไม่แตกต่างจากยานปล่อยมาตรฐานมากนักก็ตาม แผนภาพของยานพาหนะส่งแบบสองขั้นตอนทั่วไปแสดงไว้ในรูปที่ 3.3
องค์ประกอบพื้นฐานของยานปล่อยตัวคือเวที
รูปที่ 3.2 – โครงการระบบอวกาศที่ใช้ซ้ำได้ (ISS) “Venture Star”
เวทีคือชุดขององค์ประกอบโครงสร้าง เชื้อเพลิง เครื่องยนต์ และระบบที่เร่งความเร็วของยานปล่อย และจะถูกทิ้งทิ้งไปหลังจากที่เชื้อเพลิงหมด ยานพาหนะส่งที่แสดงในรูปที่ 3.2 มีเพียงขั้นตอนเดียวเท่านั้น ดังนั้นจึงไม่มีสิ่งใดถูกละทิ้งไป อย่างไรก็ตาม นี่ยังคงเป็นความฝันที่ไม่อาจบรรลุได้ ซึ่งแน่นอนว่าเราต้องพยายามต่อไป
รูปที่ 3.3 – แผนภาพของยานปล่อยสองขั้นทั่วไป ระยะจริงแสดงในรูปที่ -3.4 มันถูกสร้างขึ้นมาในเชิงเศรษฐกิจมากและมีความใกล้เคียงกับการออกแบบที่แสดงในแผนภาพมากขึ้น
รถถังเหล่านี้รวมอยู่ในโครงสร้างพลังงาน ต่างจากโครงการ ISS ตรงที่พวกมันถูกระงับ
รูปที่ 3.4 – ระยะที่สามของยานปล่อย Soyuz-2
อย่างไรก็ตามในแผนภาพในระยะที่ 2 ถังเชื้อเพลิงจะมีก้นรวมซึ่งประหยัดกว่า แต่ก็เป็นที่ยอมรับสำหรับ CRT ที่มีจุดเดือดสูงและสำหรับส่วนประกอบไครโอเจนิกจะดีกว่าถ้าใช้ช่องระหว่างถังซึ่งมีระบบควบคุม สามารถวางเครื่องมือต่างๆ ได้ จึงช่วยประหยัดพื้นที่ในแผงหน้าปัด ส่วนท้ายของระยะที่ 3 ของยานปล่อยโซยุซจะถูกทิ้งทันทีหลังจากการแยกของระยะก่อนหน้า (เพื่อจุดประสงค์ในการประหยัดด้วย)
ระยะที่ 3 ของยานปล่อย Soyuz-2 ใช้เครื่องยนต์จรวดขับเคลื่อนที่ประหยัดสูงพร้อมกล้องหมุนได้ซึ่งช่วยให้ควบคุมการเคลื่อนไหวได้
การเบรกของสเตจที่ใช้ไปนั้นเกิดขึ้นเนื่องจากก๊าซแรงดันไหลออกจากถังออกซิเจนผ่านหัวฉีดพิเศษ ถังได้รับแรงดันโดยการจ่ายฮีเลียมที่ให้ความร้อนเก็บไว้ในกระบอกสูบที่วางอยู่ในออกซิเจนเหลว สารละลายนี้ทำให้สามารถลดน้ำหนักของกระบอกสูบได้ เนื่องจากฮีเลียมที่อุณหภูมิแช่แข็งจะมีปริมาตรน้อยกว่ามาก
เวทีที่เป็นปัญหานั้นประกอบขึ้นเป็นหน่วยจรวดที่แยกจากกันและเรียกว่า "บล็อก I" และระยะแรกของยานพาหนะส่งโซยุซประกอบด้วยบล็อกจรวดสี่บล็อกแยกกัน - B, C, D และ D นี่เป็นเพราะความจริงที่ว่าขั้นตอนที่หนึ่งและสองของยานพาหนะส่งโซยุซ (รูปที่ 3.5) เชื่อมต่อแบบขนาน วงจร (แพ็คเกจ) และตัวที่สองและสาม - ตามลำดับ (ตีคู่)
วงจรซีเควนเชียล (ตีคู่) เหมาะที่สุดสำหรับยานปล่อยแบบใช้แล้วทิ้ง ในเวลาเดียวกัน แรงต้านตามหลักอากาศพลศาสตร์ที่ต่ำกว่าจะมั่นใจได้กว่ารถปล่อยพัสดุ เครื่องยนต์จรวดขับเคลื่อนด้วยของเหลวทำงานในโหมดที่ใกล้เคียงกับการออกแบบ บรรลุความสมบูรณ์ของมวลที่สูงกว่า และเกิดการรบกวนน้อยลงเมื่อแต่ละขั้นถูกแยกออกจากกัน
การออกแบบบรรจุภัณฑ์ถือกำเนิดขึ้นในยุครุ่งอรุณของยุคอวกาศ เนื่องจากเป็นไปไม่ได้ที่จะสร้างเครื่องยนต์ที่มีแรงขับสูงซึ่งจำเป็นสำหรับขั้นตอนแรกของยานปล่อยแบบตีคู่ กลุ่มห้าบล็อกที่ทำงานใกล้พื้นดินช่วยแก้ปัญหานี้ได้
อย่างไรก็ตาม ปัญหาได้ถูกสร้างขึ้นสำหรับระยะที่สอง ประการแรก เครื่องยนต์จรวดเชื้อเพลิงเหลวที่ออกแบบมาเพื่อทำงานในสุญญากาศจะต้องทำงานใกล้พื้นดินโดยมีการขยายตัวมากเกินไป และประการที่สอง ณ เวลาที่แยกจากระยะแรก ถังจะว่างเปล่าครึ่งหนึ่งอยู่แล้ว ซึ่งจะลดความสมบูรณ์ของมวลลง
รูปที่ 3.5 – เค้าโครงของยานปล่อยจรวด Soyuz-2
ในเวลาเดียวกัน รูปแบบแพ็คเกจพบว่ามีการใช้งานอย่างแพร่หลายในยานยนต์เปิดตัวสมัยใหม่เพื่อให้มีความหลากหลาย การติดตั้งสเตจด้านข้าง (บูสเตอร์) จะเพิ่มความสามารถในการบรรทุกของยานปล่อย หลักการนี้ถูกนำมาใช้เมื่อสร้างยานยิง Angara โดยใช้โมดูลจรวดสากล (URM) (รูปที่ 3.6)
รูปที่ 3.6 - โมดูลจรวดสากล URM - ขึ้นอยู่กับเครื่องยนต์จรวดเหลว RD - ตระกูลยานพาหนะส่งของ Angara รวมถึงยานพาหนะส่งของที่มีการดัดแปลงหลายอย่างในช่วงความสามารถในการบรรทุกตั้งแต่ 2 ตัน (Angara 1.1) ถึง 25 ตัน (Angara A5) ที่ต่ำ วงโคจรระดับโลก (เมื่อปล่อยจากคอสโมโดรมเพลเซตสค์) (รูปที่ 3.7)
รูปที่ 3.7 – โมเดลยานพาหนะส่งของตระกูล Angara
"Angara" รุ่นต่างๆ ถูกนำมาใช้โดยใช้โมดูลจรวดสากลจำนวนที่แตกต่างกัน (URM-1 - สำหรับด่านแรก, URM-2 - สำหรับที่สองและสาม) - หนึ่งโมดูล URM-1 สำหรับผู้ให้บริการระดับเบา (“ Angara 1.1 และ 1.2”) สามลำสำหรับเรือบรรทุกเครื่องบินชั้นกลาง (“Angara A3”) และห้าลำสำหรับเครื่องบินบรรทุกหนัก (“Angara A5”) ความยาวของ URM-1 คือ 25.1 ม. เส้นผ่านศูนย์กลาง 2.9 ม. และน้ำหนักรวมเชื้อเพลิง 149 ตัน URM-1 ติดตั้งเครื่องยนต์ออกซิเจนน้ำมันก๊าด RD-191 และ URM-2 ติดตั้ง RD-0124a เพื่อเพิ่มประสิทธิภาพมวล ขอเสนอให้ใช้วิธีการถ่ายโอนส่วนประกอบเชื้อเพลิงระหว่างระยะจรวด เพื่อที่ว่าในขณะที่แยกบล็อกด้านข้างในบล็อกกลาง ถังเชื้อเพลิงจะเต็ม ยิ่งไปกว่านั้น กำลังพิจารณาความเป็นไปได้ในการช่วยเหลือ URM ระยะแรก ซึ่งระบบกู้ภัยกำลังได้รับการทดสอบบนพื้นฐานของ URM ของยานปล่อยไบคาลที่นำกลับมาใช้ใหม่ได้
ในช่วงปลายยุค 60 - ต้นยุค 70 ในสหรัฐอเมริกา งานเริ่มศึกษาความเป็นไปได้ของการใช้อวกาศเพื่อปฏิบัติการรบในอวกาศและจากอวกาศ รัฐบาลสหภาพโซเวียตได้ออกมติพิเศษหลายประการ (มติครั้งแรกของคณะกรรมการกลาง CPSU และคณะรัฐมนตรีของสหภาพโซเวียต
“ในการศึกษาความเป็นไปได้ของการสร้างอาวุธสำหรับการปฏิบัติการรบในและจากอวกาศ” ตีพิมพ์ในปี 1976) งานในประเทศในพื้นที่นี้ได้รับความไว้วางใจจากความร่วมมือขององค์กรพัฒนาที่นำโดย NPO Energia ในช่วงทศวรรษที่ 70-80 ชุดการศึกษาได้ดำเนินการเพื่อกำหนดวิธีที่เป็นไปได้ในการสร้างทรัพย์สินอวกาศที่มีความสามารถในการแก้ไขปัญหาการทำลายยานอวกาศทางทหาร ขีปนาวุธในการบิน รวมถึงเป้าหมายทางอากาศ ทะเล และภาคพื้นดินที่สำคัญโดยเฉพาะ... .เพื่อทำลายวัตถุอวกาศทางทหาร ยานอวกาศต่อสู้สองลำได้รับการพัฒนาบนพื้นฐานการออกแบบเดียว ติดตั้งระบบอาวุธออนบอร์ดประเภทต่างๆ - เลเซอร์ (ศูนย์การต่อสู้ Skif) และขีปนาวุธ (ศูนย์การต่อสู้แบบเรียงซ้อน) พื้นฐานของอุปกรณ์ทั้งสองคือหน่วยบริการแบบครบวงจรที่สร้างขึ้นบนพื้นฐานของการออกแบบ ระบบบริการ และหน่วยของสถานีวงโคจรของซีรีส์ 17K DOS
ต่างจากสถานี สถานีบริการต้องมีถังเชื้อเพลิงที่ใหญ่กว่ามากสำหรับระบบขับเคลื่อนเพื่อให้แน่ใจว่าเคลื่อนที่ได้ในวงโคจร
ระบบอวกาศต่อสู้ - น้ำหนักบรรทุกของยานอวกาศ Buran:
ระบบ "สกิฟ"รายละเอียด: 1 - ช่องเก็บเครื่องมือและเชื้อเพลิง; 2 - ช่องรวม; 3 - คอมเพล็กซ์อาวุธพิเศษออนบอร์ด
ระบบ "น้ำตก"การกำหนด: 1 - หน่วยฐานซึ่งรวมถึงช่องเครื่องยนต์และเครื่องมือ - เชื้อเพลิง 2 - ระบบอาวุธออนบอร์ด; 3 - ขีปนาวุธกลับบ้าน (ดูรูปด้านล่าง)
ต่อสู้กับขีปนาวุธสกัดกั้นการกลับบ้านในอวกาศ
การปล่อยยานอวกาศขึ้นสู่วงโคจรควรดำเนินการในห้องเก็บสัมภาระของเรือโคจร ISS Buran (โดยใช้ยานยิง Proton ในขั้นตอนการทดลอง) มีการวางแผนที่จะเติมเชื้อเพลิงให้กับรถถังในวงโคจรโดยใช้วิธีที่ส่งไปยังอุปกรณ์ใน ISS Buran OC เพื่อให้ ระยะยาวหน้าที่การต่อสู้ในวงโคจรและการรักษาความพร้อมสูงของพื้นที่เชิงซ้อนมันเป็นไปได้ที่จะเยี่ยมชมวัตถุกับลูกเรือ (สองคนนานถึง 7 วัน) รวมถึงการใช้ยานอวกาศโซยุซ
มวลที่เล็กกว่าของคอมเพล็กซ์อาวุธออนบอร์ด "Cascade" พร้อมอาวุธขีปนาวุธเมื่อเปรียบเทียบกับคอมเพล็กซ์ "Skif" ที่มีอาวุธเลเซอร์ทำให้มีปริมาณเชื้อเพลิงที่มากขึ้นบนยานอวกาศได้ ดังนั้นจึงดูเหมือนเหมาะสมที่จะสร้างระบบที่มี กลุ่มดาวในวงโคจรประกอบด้วยยานอวกาศต่อสู้ ส่วนหนึ่งติดตั้งอาวุธเลเซอร์ และอีกส่วนหนึ่งมีอาวุธขีปนาวุธ ในกรณีนี้ ยานอวกาศประเภทแรกจะใช้สำหรับวัตถุที่มีวงโคจรต่ำและประเภทที่สอง - สำหรับวัตถุที่อยู่ในระดับความสูงปานกลางและวงโคจรค้างฟ้า
เพื่อทำลายการยิงขีปนาวุธและหัวรบในระหว่างระยะการบิน NPO Energia ได้พัฒนาโครงการสำหรับขีปนาวุธสกัดกั้นในอวกาศสำหรับคอมเพล็กซ์ Cascade ในทางปฏิบัติของ NPO Energia นี่เป็นจรวดที่เล็กที่สุด แต่อุดมด้วยพลังงานมากที่สุด พอจะกล่าวได้ว่าด้วยมวลการยิงที่วัดได้เพียงสิบกิโลกรัม ขีปนาวุธสกัดกั้นจึงมีความเร็วเฉพาะที่สงวนไว้ซึ่งสอดคล้องกับความเร็วเฉพาะตัวของจรวดที่ปล่อยน้ำหนักบรรทุกสมัยใหม่ขึ้นสู่วงโคจรดาวเทียม ประสิทธิภาพสูงเกิดขึ้นได้จากการใช้โซลูชันทางเทคนิคที่อิงจากความสำเร็จล่าสุดของวิทยาศาสตร์และเทคโนโลยีในประเทศในด้านการย่อขนาดของเครื่องมือวัด การพัฒนาดั้งเดิมของ NPO Energia คือระบบขับเคลื่อนที่เป็นเอกลักษณ์ซึ่งใช้เชื้อเพลิงที่ไม่ผ่านการแช่แข็งแบบแหวกแนวและวัสดุคอมโพสิตที่แข็งแกร่งเป็นพิเศษ ในช่วงต้นทศวรรษที่ 90 เนื่องจากการเปลี่ยนแปลงในสถานการณ์การทหารและการเมือง งานเกี่ยวกับระบบพื้นที่การต่อสู้ที่ NPO Energia จึงถูกหยุดลง หน่วยงานเฉพาะเรื่องทั้งหมดของสำนักออกแบบหัวหน้าและความร่วมมือในวงกว้างขององค์กรพัฒนาเฉพาะทางของกลุ่มอุตสาหกรรมการทหารของประเทศตลอดจนองค์กรวิจัยชั้นนำของกระทรวงกลาโหมและ Academy of Sciences มีส่วนร่วมในงานด้านพื้นที่การต่อสู้.. .
บริษัทแม่ของศูนย์เลเซอร์สำหรับ Skif คือ NPO Astrophysics ซึ่งเป็นบริษัทเลเซอร์ชั้นนำของสหภาพโซเวียต หลังจากการโอน Skif Backlog จาก NPO Energia ไปยังสำนักออกแบบ Salyut ในช่วงต้นทศวรรษ 1980 ทีมงานใหม่ได้พัฒนาโครงการสำหรับสถานีเลเซอร์ต่อสู้หนักในอวกาศ Skif เมื่อวันที่ 18 สิงหาคม พ.ศ. 2526 เลขาธิการคณะกรรมการกลาง CPSU ยูริ วลาดิมีโรวิช อันโดรปอฟ แถลงว่าสหภาพโซเวียตหยุดการทดสอบศูนย์ต่อต้านอวกาศเพียงฝ่ายเดียว อย่างไรก็ตาม ด้วยการประกาศโครงการ Strategic Defense Initiative (SDI) ในสหรัฐอเมริกา งานบน Skif ยังคงดำเนินต่อไป และในวันที่ 15 พฤษภาคม พ.ศ. 2530 ได้มีการทดสอบต้นแบบแบบไดนามิกของสถานีเลเซอร์ Skif-DM ที่มีน้ำหนักประมาณ 80 ตันในอวกาศ ระหว่างการทดสอบเปิดตัวยาน Energia Launch ครั้งแรก .
ดูบันทึกความทรงจำของหัวหน้าผู้ออกแบบยานยนต์ยิง Energia B.I. Gubanov: "Polyus"
เพื่อโจมตีเป้าหมายภาคพื้นดินที่สำคัญเป็นพิเศษ สถานีอวกาศจึงได้รับการพัฒนา โดยมีพื้นฐานคือสถานีซีรีส์ 17K DOS และโมดูลอัตโนมัติที่มีหัวรบแบบขีปนาวุธหรือแบบร่อน เมื่อได้รับคำสั่งพิเศษ โมดูลต่างๆ จะถูกแยกออกจากสถานี โดยการหลบหลีกพวกเขาจะต้องครอบครองตำแหน่งที่ต้องการในอวกาศ ตามด้วยการแยกบล็อกตามคำสั่งสำหรับการใช้งานการต่อสู้ การออกแบบและระบบหลักของโมดูลอัตโนมัติถูกยืมมาจากเรือวงโคจร Buran เนื่องจากเป็นหัวรบที่แตกต่างจากหัวรบ จึงได้พิจารณาอุปกรณ์ที่ใช้แบบจำลองทดลองของ Buran OK (อุปกรณ์ในตระกูล BOR)
โหลดเป้าหมายทางทหารสำหรับเครื่องยิงขีปนาวุธ Buran ได้รับการพัฒนาบนพื้นฐานของมติลับพิเศษของคณะกรรมการกลาง CPSU และคณะรัฐมนตรีของสหภาพโซเวียต "ในการศึกษาความเป็นไปได้ในการสร้างอาวุธสำหรับการปฏิบัติการรบในอวกาศและจากอวกาศ " (1976)
ต่อสู้กับสถานีอวกาศด้วยหน่วยช็อตที่มีพื้นฐานมาจากยานอวกาศ Buran
1 - หน่วยฐาน; 2 - ศูนย์ควบคุมหัวรบ 3 - เรือขนส่งแบบใช้ซ้ำได้ "Zarya"; 4 - โมดูลสถานีรบพร้อมระบบเล็ง 5 - โมดูลการต่อสู้ (ขึ้นอยู่กับลำตัว Buran)
โมดูลการต่อสู้ (ดูรูปด้านล่าง) ไปที่เป้าหมาย

โมดูลการโจมตีการต่อสู้ตามอวกาศ:
1 - จุดเชื่อมต่อ;
2 - ส่วนด้านหน้าของลำตัว (NFF);
3 - ช่องเปลี่ยน;
5 - บล็อกเครื่องยนต์ควบคุมคันธนู;
6 - ส่วนตรงกลางของลำตัว (MCF);
7 - ส่วนหลังของลำตัว (HF);
8 - ประตูห้องบรรทุกสินค้าพร้อมแผงแลกเปลี่ยนความร้อนแบบรังสี
![]()
เป็นไปได้มาก (ด้วยเหตุผลที่ชัดเจนเราถูกบังคับให้ใช้วลีนี้ - "เป็นไปได้มากที่สุด") หัวรบซึ่งโดยพื้นฐานแล้วคือการร่อนระเบิดนิวเคลียร์ควรถูกวางไว้อย่างแน่นหนาในช่องบรรทุกของโมดูลการโจมตีการต่อสู้โดยมีคอนโซลปีกแบบพับในสาม ... เครื่องยิงปืนลูกโม่ที่ติดตั้งตามลำดับจำนวนสี่เครื่อง ภาพทางด้านซ้ายแสดงภาพตัดขวางของส่วนบรรทุกสินค้าที่มีหัวรบติดตั้งอยู่บนเครื่องยิงป้อมปืนตัวใดตัวหนึ่ง
ขนาดของช่องบรรทุกสินค้า Buran ช่วยให้สามารถวางหัวรบได้สูงสุดห้าหัวรบในแต่ละยูนิตดีดตัวที่หมุนได้ ดังแสดงในรูป เมื่อพิจารณาถึงการเคลื่อนตัวด้านข้างที่เป็นไปได้ของหัวรบแต่ละหัวในระหว่างการเคลื่อนตัวลงมาในชั้นบรรยากาศอย่างน้อยบวก/ลบ 1,100...1,500 กม. โมดูลโจมตีหนึ่งชุดสามารถทำได้ในระยะเวลาอันสั้นด้วยหัวรบเคลื่อนที่ยี่สิบลูกที่จะกวาดล้างสิ่งมีชีวิตทั้งหมดจากใบหน้าของ โลกเป็นแถบกว้างถึง 3,000 กม.
นี่คือวิธีที่เขาอธิบายการใช้การต่อสู้ สถานีอวกาศ S. Aleksandrov ในบทความของเขาเรื่อง "ดาบที่กลายเป็นโล่" (“เทคโนโลยีสำหรับเยาวชน”, หมายเลข 4/98):
"...โมดูลพื้นฐานแบบเดียวกับที่สถานีโคจร Mir ซึ่งเป็นโมดูลด้านข้างเดียวกัน (ไม่เป็นความลับอีกต่อไปแล้ว เช่น บน Spektr มีการวางแผนที่จะทดสอบระบบออปติคอลเพื่อตรวจจับการยิงขีปนาวุธ... และ แพลตฟอร์มที่มีความเสถียรพร้อมโทรทัศน์และกล้องบน "คริสตัล" - ทำไมไม่เห็นล่ะ) แต่แทนที่จะเป็น "Kvant" ทางดาราศาสตร์ฟิสิกส์จะมีโมดูลที่มีความซับซ้อนควบคุมการต่อสู้ ใต้ "ลูกบอล" ของช่องเปลี่ยนผ่านจะมีอีกอันหนึ่ง อะแดปเตอร์ที่สี่โมดูลแขวนอยู่ (ขึ้นอยู่กับลำตัว "Buranovsky") พร้อมหน่วยรบ นี่คือ "ตำแหน่งเริ่มต้น" เมื่อมีการเตือนภัยพวกมันจะแยกและแยกออกสู่วงโคจรการทำงานโดยเลือกจากการพิจารณาต่อไปนี้: ดังนั้น แต่ละหน่วยไปถึงเป้าหมายในขณะที่ศูนย์ควบคุมบินอยู่เหนือมัน
ลำตัว Buran ใช้ในโครงการนี้ตามหลักการ "อย่าปล่อยให้อะไรสูญเปล่า": เชื้อเพลิงสำรองขนาดใหญ่ในระบบขับเคลื่อนแบบรวมและระบบควบคุมที่ดีมากช่วยให้สามารถเคลื่อนที่ในวงโคจรได้อย่างแข็งขันในขณะที่น้ำหนักบรรทุก - หัวรบ - อยู่ ในภาชนะที่ซ่อนตัวจากสายตาที่อยากรู้อยากเห็นตลอดจนปัจจัยที่ไม่พึงประสงค์จากการบินในอวกาศ
สิ่งที่สำคัญในบริบทของการป้องปรามเชิงกลยุทธ์ก็คือ ระบบอาวุธนี้จะโจมตีแบบ "ผ่าตัด" อย่างมีเป้าหมาย แม้ว่าสิ่งอื่นจะถูกทำลายก็ตาม เช่นเดียวกับเรือดำน้ำนิวเคลียร์ เธอสามารถรอการระดมยิงครั้งแรกได้!”
ความแตกต่างของโมดูลการโจมตีและการปล่อยหัวรบ
เมื่อสร้าง Buran สันนิษฐานว่าหัวรบเคลื่อนที่สามารถวางได้ไม่เพียง แต่บนโมดูลโจมตีเท่านั้น แต่ยังรวมถึงบนเรือโคจรด้วยซึ่งตั้งอยู่บนปืนกลหมุนภายในห้องเก็บสัมภาระ มีความเป็นไปได้ว่า ถ้าจำเป็น (เช่น การยกเลิกคำสั่งการใช้การรบ) หุ่นยนต์บนเรือสามารถนำไปใช้ในการคืนโมดูลโจมตีไปยังห้องเก็บสัมภาระบนเครื่องยิงแบบหมุนได้สำหรับการบำรุงรักษาและนำกลับมาใช้ใหม่ ดังที่แสดง ในรูปด้านล่าง

มีข้อมูลที่ไม่เป็นชิ้นเป็นอันเกี่ยวกับแง่มุมทางทหารอื่น ๆ ของการใช้เรือโคจร โดยเฉพาะอย่างยิ่งเป็นส่วนหนึ่งของ "การตอบสนองที่ไม่สมมาตร" ต่อโปรแกรมอเมริกัน " สตาร์วอร์ส"(SOI - Strategic Defense Initiative) พิจารณาประเด็นการขุดพื้นที่ใกล้โลกด้วยความช่วยเหลือของ "Buran" ด้วยการสร้างม่านที่ผ่านไม่ได้สำหรับส่วนอวกาศของ SOI นอกจากนี้ในสหภาพโซเวียตยังมีการวิจัยร่วมกับ การทดสอบเชิงทดลองภาคพื้นดินเกี่ยวกับการสร้างเมฆระเบิดในวงโคจร "เคลียร์" พื้นที่ใกล้โลกทั้งหมดอย่างรวดเร็วและสมบูรณ์ตั้งแต่ยานอวกาศไปจนถึงระดับความสูง 3,000 กม. แน่นอนว่าหลังจากนี้พื้นที่ใกล้โลกก็ไม่สามารถเข้าถึงได้อย่างสมบูรณ์เป็นเวลาหลายเดือน แต่ควรใช้มาตรการเหล่านี้เฉพาะในช่วง (หรือก่อนหน้านั้น) ความขัดแย้งทางทหารเต็มรูปแบบระหว่างสหภาพโซเวียตและสหรัฐอเมริกา และดังที่คุณทราบ "พวกเขาตัดไม้ทำลายป่าและเศษซาก"...
หน่วยงานการศึกษาของรัฐบาลกลาง
สถาบันการบินมอสโก
(มหาวิทยาลัยเทคนิคของรัฐ)
สาขา "วอสคอด"
แผนก B-11
คำแนะนำด้านระเบียบวิธี
ในหัวข้อ: “ระบบจรวดและอวกาศ”
สาขา "วอสคอด" เชียงใหม่
พิธีสารเลขที่____________
จาก "___"_________2013
ใบโคนูร์ 2013
คำอธิบายประกอบ
แนวทางนี้มีวัตถุประสงค์เพื่อช่วยนักศึกษาพิเศษ 070300 ในการปฏิบัติงานห้องปฏิบัติการในหลักสูตร " เครื่องบิน ».
งานในห้องปฏิบัติการขึ้นอยู่กับการศึกษาโครงสร้างของคอสโมโดรมและส่วนที่เป็นส่วนประกอบ - RSC งานนี้กำหนดองค์ประกอบของกลุ่มจรวดและอวกาศ โครงสร้าง และให้แนวคิดพื้นฐานที่กำหนดรูปลักษณ์ของ RSC
งานในห้องปฏิบัติการทำให้สามารถศึกษาทั้งโครงสร้างของ RKK ตลอดจนองค์ประกอบและวัตถุประสงค์การทำงานได้
คำอธิบายประกอบ
การกำหนดพื้นฐาน 4
บทนำ 5
วัตถุประสงค์ของห้องปฏิบัติการ 6
1 จรวดและอวกาศที่ซับซ้อน: วัตถุประสงค์ โครงสร้าง
การจำแนกประเภทพื้นที่ตำแหน่ง RKK 7
2 ตำแหน่งทางเทคนิคของ RKK 11
3 ตำแหน่งเริ่มต้น RKK 15
4 ลักษณะของแรงกระทำ
ผู้ติดตั้ง 25 คนต่อระบบการยก
4.1 ประเภทของโหลด 25
4.2 ช่วงเวลาโหลด 26
4.3 ภาคปฏิบัติ 30
5 การรายงานทางห้องปฏิบัติการ 31
คำถามทดสอบ 32
วรรณกรรม 33
การกำหนดพื้นฐาน
KA – ยานอวกาศ
KRT – ส่วนประกอบเชื้อเพลิงจรวด
RKK - จรวดและอวกาศที่ซับซ้อน
RN – ยานปล่อยตัว
RB – บล็อกการเร่งความเร็ว
SP – ตำแหน่งเริ่มต้น
TP – ตำแหน่งทางเทคนิค
การแนะนำ
เมื่อเริ่มงานห้องปฏิบัติการ นักศึกษาจะต้องศึกษาทฤษฎีที่นำเสนอในเนื้อหาการบรรยายอย่างรอบคอบ

รูปที่ 4 - แผนผังตำแหน่งเริ่มต้นของ RKK
ก่อนที่จะติดตั้งยานปล่อยบนตัวเรียกใช้งาน หอบริการจะถูกนำไปตามรางรถไฟแบบพิเศษไปยังอุปกรณ์สตาร์ท ระบบลูกรอกของหอบริการช่วยให้มั่นใจในการถ่ายโอนยานยิงจากตำแหน่งแนวนอนไปเป็นแนวตั้ง ILV ได้รับการติดตั้งพร้อมกับวงเล็บรองรับบนตัวเรียกใช้งาน ไซต์บริการกำลังถูกปรับใช้รอบๆ RKN การเชื่อมต่อการเติมของระบบเติม KRT LV ขั้วต่อไฟฟ้าของ NPPEO และท่อของระบบจ่ายก๊าซเชื่อมต่อกับ LV
ก่อนที่จะเปิดตัว ILV หอบริการจะถูกถอดออกจากตัวเรียกใช้งาน สิ่งอำนวยความสะดวกในการเปิดตัวพร้อมกับสิ่งอำนวยความสะดวกในการเปิดตัวสำหรับยานยิง Soyuz เป็นโครงสร้างคอนกรีตเสริมเหล็กหลายชั้นซึ่งส่วนบนอยู่ที่ระดับของแผ่นยิงจรวดโดยมีช่องเปิดกว้างตรงกลางซึ่งกลายเป็นทางลาดเดี่ยว ท่อก๊าซ ตัวเรียกใช้งานตั้งอยู่ที่ด้านบนของโครงสร้างการเปิดตัว โครงรองรับแบบพับได้สี่อันติดบานพับอยู่บนส่วนวงกลมที่เคลื่อนย้ายได้ หลังจากที่ผู้ติดตั้งย้ายยานปล่อยจากตำแหน่งแนวนอนไปเป็นแนวตั้ง โครงยึดลอนเชอร์จะถูกส่งไปยังหน่วยกำลังของยานปล่อย ส่วนบนของโครงถักปิดอยู่ในวงแหวนแรง และแรงโน้มถ่วงของเครื่องยิงจรวดจะถูกส่งผ่านวงแหวนแรงไปยังเครื่องยิงจรวด . กับเมื่อเริ่มต้นการยกยานปล่อยเมื่อสตาร์ท โหลดบนวงแหวนบังคับจะถูกเอาออก และโครงรองรับจะเปิดออกภายใต้การกระทำของตุ้มน้ำหนัก ซึ่งช่วยให้ยานปล่อยผ่านได้
ในส่วนที่กำลังหมุนของเครื่องยิงจรวด มีการติดตั้งโครงบริการสองอันที่มีแท่นบริการครึ่งวงกลม ซึ่งปิดรอบจรวด ก่อให้เกิดระบบของแท่นบริการวงแหวนสำหรับทั้งยานปล่อยจรวดและยานอวกาศ ในการส่งมอบเครื่องมือ เครื่องมือ ลูกเรือปล่อยยานอวกาศ และลูกเรือของยานอวกาศที่มีคนขับ ฟาร์มแห่งนี้ได้รับการติดตั้งลิฟต์บรรทุกสินค้าและลิฟต์โดยสาร ก่อนเริ่มต้น โครงถักจะถูกถอดออกจากตัวเรียกใช้งานและลดระดับลงในตำแหน่งแนวนอน
ในส่วนที่หมุนเดียวกันนั้นมีเสาสายเคเบิลสำหรับจ่ายขั้วต่อไฟฟ้า NPPEO การสื่อสารก๊าซและการระบายน้ำให้กับ LV
การจัดตำแหน่งของระนาบหลักที่มีความสมมาตรของยานยิงทั้งคอสมอสและโซยุซกับเครื่องบินยิงเมื่อทำการเล็งนั่นคือ การหมุนของยานยิงไปตามราบปล่อยนั้นดำเนินการโดยการหมุนส่วนที่หมุนของตัวเรียกใช้งาน
ก่อนที่จะปล่อยยานปล่อย Soyuz เสาเคเบิลจะถูกปลดออกโดยอัตโนมัติและพับกลับโดยอัตโนมัติภายใต้อิทธิพลของน้ำหนักถ่วง
คุณสมบัติของ RSC Proton SC เปรียบเทียบกับ RSC Soyuz SC:
1) ILV ถูกขนส่งจาก TC ไปยัง NC โดยใช้ชานชาลาทางรถไฟ -

1 - กลไกการยกบูมของ TUA 2 - พื้นที่ให้บริการ; 3 - บูมของหน่วยขนส่งและติดตั้ง (TUA)
รูปที่ 5 - การบำรุงรักษา “Cosmos” ที่ตัวเรียกใช้งาน
เราการติดตั้ง ILV บนตัวเรียกใช้งานนั้นดำเนินการด้วยความช่วยเหลือของผู้ติดตั้งแบบอยู่กับที่ซึ่งมีบูมพร้อมระบบไฮดรอลิกติดตั้งอยู่ในโครงสร้างการเปิดตัว
2) ยานปล่อยจรวดได้รับการติดตั้ง (และไม่ได้แขวนลอย) บนส่วนรองรับไฮดรอลิกของเครื่องยิงจรวด และได้รับการแก้ไขที่ส่วนล่างด้วยด้ามจับเชิงกลพิเศษที่ยึดยานยิงจนกระทั่งปล่อยตัว
3) ระบบควบคุมของยานยิงทำให้มั่นใจได้ว่าจะหมุนไปตามราบปล่อยในส่วนแนวตั้งของการเคลื่อนที่ ดังนั้นจึงไม่มีกลไกการหมุนบนตัวเรียกใช้งาน
4) ไม่มีเสาสายเคเบิลบนแผงควบคุม: จะถูกแทนที่ด้วยกลไกการเชื่อมต่อซึ่งเป็นชุดของแผงไฟฟ้าและนิวแมติก กลไกการเชื่อมต่อเมื่อเรา-
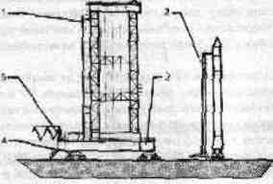
1 – ลิฟต์; 2 – เสาสายเคเบิล; 3 – แพลตฟอร์ม; 4 – กลไกการเคลื่อนไหว; 5 – ไปป์ไลน์แบบยืดหยุ่น; 6 – หอบริการ
ถังจรวดเชื่อมต่อกับแผงตอบสนองในส่วนท้ายของยานปล่อย ให้การติดต่อกับการสื่อสารทางไฟฟ้าและนิวแมติกมากกว่าห้าพันครั้ง
5) การเติม CRT ที่เป็นพิษจะดำเนินการในวงจรปิด ไม่รวมการปล่อยหรือปล่อยไอระเหย CRT ออกสู่สถานที่ของโรงงานและสู่ชั้นบรรยากาศ ไอของออกซิไดเซอร์จะถูกทำให้เป็นกลางทางเคมี และไอของเชื้อเพลิงจะถูกเผาไหม้
RSC Zenit สามารถทำการยิงโดยไม่ต้องมีส่วนร่วมของมนุษย์โดยตรง เช่น มันถูกสร้างขึ้นตามแนวคิดของ "การปล่อยไร้คนขับ" (รูปที่ 6 และ 7) การขนส่ง ILV จาก TC ไปยัง SK, การติดตั้ง ILV บน PU, การเชื่อมต่อการสื่อสารแบบไฮดรอลิก นิวแมติก และไฟฟ้าจะดำเนินการโดยอัตโนมัติ ในแง่ของระบบอัตโนมัติและความปลอดภัย RSC Zenit ไม่มีระบบอะนาล็อกในโลก
รับข้อความฉบับเต็มยานปล่อย Start ถูกปล่อยจากเครื่องยิงอัตตาจร (รูปที่ 9) ซึ่งติดตั้งอยู่บนแชสซีแบบล้อหลายเพลา
การออกแบบตัวเรียกใช้งานและตัวเรียกใช้งานช่วยให้มั่นใจได้ว่าการบำรุงรักษาในระยะยาวในตำแหน่งแนวนอน เมื่อได้รับคำสั่งปล่อยตัว ตู้ขนส่งและปล่อยจรวดพร้อมเครื่องยิงจรวดจะถูกถ่ายโอนจากตำแหน่งแนวนอนไปเป็นแนวตั้งภายใน 40-50 วินาทีโดยใช้กระบอกสูบไฮดรอลิก จากนั้นจึงใช้เครื่องสะสมแรงดันผง (PAA) ซึ่งอยู่ใน ด้านล่างของ TPK จัดให้มี "การยิงด้วยปูน" เช่น PAD ปล่อยเครื่องยิงจรวดด้วยความเร็ว 70-80 กม./ชม. จาก TPK - ที่ระดับความสูง 25-30 เมตร จากพื้นผิวโลก เครื่องยนต์ขับเคลื่อน ของเวทีเปิดตัวแล้ว การสตาร์ทเครื่องยนต์หลักที่ระดับความสูงเกือบจะกำจัดผลกระทบของก๊าซเครื่องยนต์ที่มีอุณหภูมิสูงบนตัวเรียกใช้งานได้เกือบทั้งหมด ซึ่งจะช่วยลดต้นทุนของงานซ่อมแซมและฟื้นฟูหลังการเปิดตัวได้อย่างมาก

รูปที่ 7 - การติดตั้งยานยิงเซนิตบนตัวเรียกใช้งาน:
1 - รองรับไฮดรอลิก TUA; 2 - บูม TUA; 3 - เสาสายเคเบิล; 4 - กระบอกไฮดรอลิกสำหรับยกบูม TUA; 5 - ท่อระบบทำความเย็น
เนื่องจากอัตราส่วนแรงขับต่อน้ำหนักของจรวดอวกาศอยู่ในช่วง 1.4-1.8 พวกมันจึงค่อย ๆ ออกจากตัวเรียกใช้งาน ดังนั้นไอพ่นก๊าซอุณหภูมิสูงจากระบบขับเคลื่อนจึงส่งผลกระทบต่อตัวเรียกใช้งานเป็นเวลานาน เพื่อลดภาระความร้อน เสียง และเครื่องกลบนท่อก๊าซและองค์ประกอบต่างๆ ดีไซน์ PU สร้างม่านน้ำบริเวณเปลวไฟ ที่ เอสซี อาร์เคเค
“โปรตอน” และ “ซีนิธ” ได้รับการปกป้องกลไกการเชื่อมต่อด้วยประตูหุ้มเกราะ
 |
1 – บอร์ด LV ออนบอร์ด; 2 – บล็อกเชื่อมต่อเสาสายเคเบิล 3 – เสาสายเคเบิล; 4 – อุปกรณ์เชื่อมต่อสำหรับการสื่อสารสำหรับการเติมเชื้อเพลิง SRT, ฮีเลียมและการควบคุมอุณหภูมิของส่วนท้าย LV; 5 – ถ่วง KM
บล็อกเทคโนโลยี ออกแบบเพื่อรองรับอุปกรณ์ทดสอบและสตาร์ท ระบบควบคุมระยะไกลสำหรับการเติมน้ำมัน LVส่วนประกอบของเชื้อเพลิงจรวดและก๊าซอัด ตลอดจนเพื่อรองรับลูกเรือด้านซ้ายของตำแหน่งควบคุมการปล่อยตัว
สถานที่จัดเก็บเครื่องเขียน KRT - โครงสร้างที่ใช้บรรจุถังเก็บ CRT ระบบจ่ายและควบคุมอุณหภูมิ CRT ระบบดับเพลิง และอุปกรณ์อื่นๆ
จรวดอวกาศซึ่ง 90-95% ของมวลการปล่อยซึ่งประกอบด้วย SRT ที่ยิงและระเบิดเป็นเป้าหมายที่มีความเสี่ยงเพิ่มขึ้นในกิจการร่วมค้า มากถึง 20-25% ของมวลรวมของ MCT สามารถมีส่วนร่วมในการก่อตัวของการระเบิด MCT ที่เหลือกระจัดกระจายโดยคลื่นระเบิด
|
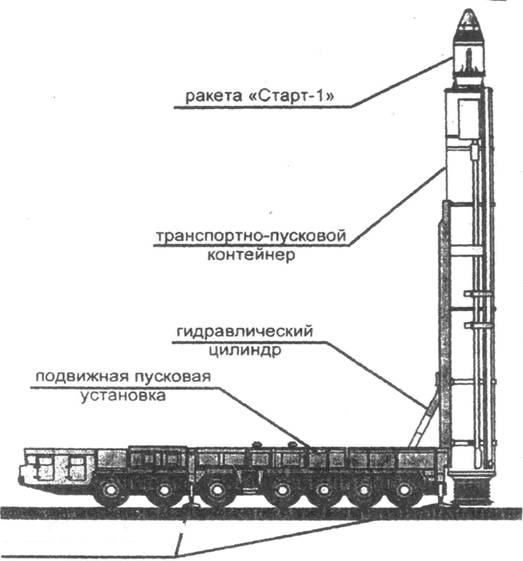
ระยะทางที่สำคัญและก่อให้เกิดเขตเพลิงไหม้ ดังนั้น การระเบิดของยานปล่อยที่มีน้ำหนักการปล่อย 100 ตันจึงเทียบเท่ากับพลังการระเบิดของทีเอ็นที ~ 20 ตัน และยานปล่อยที่มีน้ำหนักการเปิดตัว 700 ตันจะเทียบเท่ากับ ~ 70 ตันของทีเอ็นที
เมื่อเปิดตัว RLV ในพื้นที่ตำแหน่ง RKK จะมีการจัดตั้งโซนความปลอดภัย 3-4 โซน และจะมีการจัดเตรียมการรักษาความปลอดภัย ขึ้นอยู่กับลักษณะและระดับความเสี่ยงในแต่ละโซน ระบอบการปกครองที่เข้มงวดการเข้าถึงงานและมีมาตรการความปลอดภัยที่เหมาะสม
ลักษณะของโซนปลอดภัยระหว่างการปล่อยยานปล่อยคลาส Energia ที่มีน้ำหนักมากเป็นพิเศษ:
1) โซนที่มีรัศมี 2 กม. พร้อมระดับเสียงสูงสุด 13 5 dB; การอพยพบุคลากร 2 ชั่วโมงก่อนการปล่อยตัว
2) พื้นที่ที่มีรัศมี 5 กม. โดยมีระดับเสียงน้อยกว่า 120 เดซิเบล การอพยพ 8 ชั่วโมงก่อนการเปิดตัว
3) โซนที่มีรัศมี 8.5 กม. การอพยพ 4 ชั่วโมงก่อนการเปิดตัว
4) โซนที่มีรัศมี 15 กม. การอพยพ 4 ชั่วโมงก่อนการปล่อยตัว
เขตบริหารและเศรษฐกิจของ RKK มีไว้สำหรับที่พักและบริการด้านวัฒนธรรมและสวัสดิการสำหรับบุคลากรของหน่วยยิงจรวดตลอดจนการจัดวางวิธีการทางเทคนิคที่มีวัตถุประสงค์เพื่อจัดเตรียมอาคารและโครงสร้างของตำแหน่งทางเทคนิคด้วยไฟฟ้าความร้อนและน้ำ (รูปที่ 10)
4 ลักษณะของโหลดที่กระทำต่อระบบการยกของผู้ติดตั้ง
4.1 ประเภทของโหลด
ในบรรดาการปฏิบัติการทั้งหมดที่ดำเนินการเมื่อติดตั้งจรวดบนแท่นปล่อยจรวด สิ่งที่ต้องใช้แรงงานมากและใช้เวลานานที่สุดคือการถ่ายโอนจรวดจากตำแหน่งแนวนอนไปเป็นแนวตั้ง โดยใช้กลไกการยกบูม (รูปที่ 1) จากด้านข้างของตัวจรวด ระบบการยก (LS) โดยที่เราหมายถึงบูมด้วยจรวดหรือบูมด้วยรถเข็นขนส่งและติดตั้งด้วยจรวดโมเมนต์การต้านทานที่สร้างขึ้นโดย
|
|||||||||||
| |
|||||||||||
| |
|||||||||||
รั้วนิรภัย
ถนนรถแล่น
รูปที่ 10 – แผนผังเขตบริหารและเศรษฐกิจของ RKK (ที่เกี่ยวข้องกับหน่วยทหาร)
น้ำหนัก ความเฉื่อย และแรงลม สมการของช่วงเวลาระหว่างการเคลื่อนที่แบบหมุนของระบบยกภายใต้การกระทำของกลไกการยกมีรูปแบบ
รับข้อความฉบับเต็ม 
หรือ
MM = MG + MB + M ใน + MT, (1)
ที่ไหน มม - ช่วงเวลาที่พัฒนาโดยกลไกการยกที่สัมพันธ์กับแกนการหมุนของบูม .
หน้า - แรงแม่แรงไฮดรอลิก
ก - แขนแม่แรงไฮดรอลิก
ฉัน - โมเมนต์ความเฉื่อยมวลของระบบยกสัมพันธ์กับแกนการหมุนของบูม
ความเร่งเชิงมุมของระบบยก
ขนาดตัวอักษร:14.0pt; ความสูงของบรรทัด:150%">И
ร ;
ј - ความเร่งเชิงเส้นของจุดศูนย์ถ่วงของระบบ
ร - รัศมีการหมุนของจุดศูนย์ถ่วง
MG, MB, M ใน, MT - โมเมนต์ที่สัมพันธ์กับแกนการหมุนของบูม ตามลำดับ จากแรงน้ำหนัก แรงเฉื่อยของระบบยกจากแรงลมที่กระทำต่อระบบ และจากแรงเสียดทานในบานพับของกลไกการยก
ในการคำนวณพารามิเตอร์หลักของกลไกการยกของบูมจำเป็นต้องมีค่าของช่วงเวลาทั้งหมดเป็นหน้าที่ของมุมการยกของบูมเช่น
M G = f 1 (φ), MB = f 2 (φ), Mv = f 3 (φ), M T = f 4 (φ)
ให้เราพิจารณาวิธีการพิจารณาการขึ้นต่อกันเหล่านี้ตามลำดับ
ขนาดตัวอักษร:14.0pt;line-height:150%;สี:สีดำ"> 4.2 ช่วงเวลาโหลด
โมเมนต์เนื่องจากแรงของน้ำหนักหรือโมเมนต์โหลดเป็นฟังก์ชันของมุม ลิฟท์ถูกกำหนดจากสำนวน
มช = จีอาร์โก้ส (
หรือ มก. = GXทีเอส ( ร่วมส(3) ม ช= ฉ 1 () เป็นเป็นคลื่นโคไซน์ ดังนั้นจึงสามารถทำได้สร้างเป็นกราฟิกโดยไม่ต้องคำนวณทีละจุด โครงการ คำจำกัดความกราฟิกม ช และวาดเส้นโค้ง ม ช= ฉ 1 ( ใช่ บี. จากแนวตั้ง เกี่ยวกับ ดี มุมหนึ่งแล้วจึงแยกมุมไว้ เอโอบีเท่ากับมุมยกบูม 900
อาร์ค เอบีแบ่งออกเป็นหลายส่วนเท่า ๆ กัน (ปกติคือ 6 หรือ 9) และเส้นแนวนอนจะถูกลากผ่านจุดแบ่ง นิ บนแกนในระดับที่ยอมรับได้จากพิกัดจากมีการวางจุดแบ่งส่วนโค้งที่สอดคล้องกัน เอบีค่านิยมขนาดตัวอักษรมุม: 15.0pt; ความสูงบรรทัด: 150%; สี:สีดำ;ระยะห่างตัวอักษร:-.15pt">สี่แยกแนวนอนที่สอดคล้องกัน
รูปที่ 3 - แผนภาพการคำนวณเพื่อกำหนดช่วงเวลาโหลด
 |
เส้นปกติและเส้นแนวตั้งเป็นจุดที่เส้นโค้งผ่านมช= ฉ 1 ( ).
รูปที่ 4 – กราฟกราฟของกราฟโมเมนต์โหลด
มช เปลี่ยนเครื่องหมายและจากช่วงเวลาที่ป้องกันไม่ให้ระบบเพิ่มขึ้นกลายเป็นช่วงเวลาที่ส่งเสริมการเคลื่อนไหวต่อไป ภายใต้อิทธิพลของช่วงเวลานี้ ระบบมีแนวโน้มที่จะเอียงไปทางลิฟต์ และเพื่อป้องกันสิ่งนี้ ต้องใช้แรงต้านช่วงเวลาหนึ่งกับระบบที่ยกขึ้น เพื่อรักษาสมดุลของโมเมนต์โหลด เพื่อให้แน่ใจว่าการปรับหลักของระบบไปยังตำแหน่งแนวตั้ง
5 การรายงานทางห้องปฏิบัติการ
เพื่อปกป้องงานในห้องปฏิบัติการ นักศึกษาจะต้องส่งรายงานที่ครบถ้วนตาม ESKD ปริมาณของรายงานควรอยู่ในรูปแบบ A4 ประมาณ 10 แผ่น โดยในรูปแบบกราฟิกสามารถทำได้ด้วยมือหรือบนเครื่องพิมพ์
รายงานจะต้องนำเสนอ:
หน้าชื่อเรื่อง;
การแนะนำ;
- เนื้อหา (ส่วนการคำนวณของภาคปฏิบัติ);
บทสรุป;
- บรรณานุกรม.
คำถามควบคุม
1 จุดประสงค์ของ RKK คืออะไร?
2 โครงสร้าง RKK มีอะไรบ้าง?
3 การจำแนกประเภทของ RKK คืออะไร?
4 พื้นที่ตำแหน่ง RKK คืออะไร?
5 ตำแหน่งทางเทคนิคของ RKK คืออะไร และโครงสร้างของมันคืออะไร?
6 โครงสร้างของอาคารติดตั้งและทดสอบเป็นอย่างไร?
7 ตำแหน่งเริ่มต้นของ RKK คืออะไร และองค์ประกอบคืออะไร?
8 คอมเพล็กซ์เริ่มต้นคืออะไรและมีองค์ประกอบอย่างไร?
รายชื่อแหล่งที่มาที่ใช้
1 คอสโมโดรม / ทั่วไป เอ็ด . – อ.: โวนิซดาท, 1977. –
312 หน้า: ป่วย.
ลูกกลิ้งวัดระดับ - ม.: วิศวกรรมเครื่องกล, 2520.
3 ชาวอูมานเป็นเจ้าของภาษา คอสโมโดรม เอ็ด
ม., สำนักพิมพ์ Restart+, 2001. – 216 หน้า: ป่วย
4 การดำเนินงานของจรวดและอวกาศ: บรรยายขั้นพื้นฐาน
/ภายใต้ทั่วไป เอ็ด . – เซนต์ปีเตอร์สเบิร์ก: VIKU im. ,
พ.ศ. 2544 – 496 หน้า: ป่วย
5 ระบบอัตโนมัติ Karpin สำหรับการวัดและการตวง
มวลชน. - ม.: วิศวกรรมเครื่องกล, 2514.
6 เป็นต้น การวัดมวล ปริมาตร และ
ความหนาแน่น – อ.: สำนักพิมพ์. มาตรฐาน พ.ศ. 2515