เมื่อวันที่ 23 เมษายน พ.ศ. 2508 ดาวเทียมสื่อสารภายในประเทศดวงแรก "Molniya-1" ได้เปิดตัวสู่วงโคจรรูปไข่สูงซึ่งเป็นจุดเริ่มต้นของการสื่อสารทางวิทยุผ่านดาวเทียมในประเทศของเรา เกือบพร้อมๆ กัน ดาวเทียมสื่อสารเชิงพาณิชย์ดวงแรก Intelsat-1 ได้เปิดตัวสู่วงโคจรค้างฟ้าในสหรัฐอเมริกา
ดังนั้นแนวคิดของการเพิ่มช่วงการสื่อสารทางวิทยุอย่างรวดเร็วจึงเกิดขึ้นเนื่องจากตำแหน่งของทวนสูงเหนือพื้นผิวโลกซึ่งทำให้สามารถให้การมองเห็นวิทยุพร้อมกันของสถานีวิทยุที่จุดต่าง ๆ ของอาณาเขตอันกว้างใหญ่ . ข้อดีของระบบสื่อสารผ่านดาวเทียม (SS) คือ แบนด์วิธสูง ใช้งานได้ทั่วโลก และ คุณภาพสูงการสื่อสาร.
การกำหนดค่าของระบบ SS ขึ้นอยู่กับประเภทของดาวเทียมโลกเทียม (AES) ประเภทของการสื่อสารและพารามิเตอร์ของสถานีภาคพื้นดิน สำหรับการก่อสร้างระบบ SS ส่วนใหญ่จะใช้ ดาวเทียมสามประเภท(รูปที่ 9.1) - ในวงโคจรวงรีสูง (HEO) วงโคจรค้างฟ้า (GSO) และวงโคจรระดับความสูงต่ำ (LVO) ดาวเทียมแต่ละประเภทมีข้อดีและข้อเสียของตัวเอง
ดาวเทียมในประเทศประเภท "Molniya" ที่มีระยะเวลาการโคจร 12 ชั่วโมงความเอียง 63 °ความสูงสุดยอดเหนือซีกโลกเหนือ 40,000 กม. สามารถเป็นตัวอย่างของดาวเทียมที่มี HEO การเคลื่อนที่ของดาวเทียมในบริเวณจุดสุดยอดจะช้าลง ในขณะที่ระยะการมองเห็นวิทยุคือ 6 ... 8 ชั่วโมง ประเภทนี้ AES คือ ขนาดใหญ่พื้นที่ให้บริการครอบคลุมพื้นที่ส่วนใหญ่ของซีกโลกเหนือ ข้อเสียของ HEO คือความจำเป็นในการติดตามเสาอากาศสำหรับดาวเทียมที่ลอยช้าๆ และเปลี่ยนทิศทางจากดาวเทียมขาเข้าไปยังด้านบน
วงโคจรที่ไม่เหมือนใครคือ GSO ซึ่งเป็นวงโคจรวงกลมที่มีระยะเวลาโคจรรอบดาวเทียม 24 ชั่วโมง ซึ่งอยู่ในระนาบเส้นศูนย์สูตร ด้วยระดับความสูง 35875 กม. จากพื้นผิวโลก วงโคจรจะซิงโครนัสกับการหมุนของโลก ดังนั้นดาวเทียมจึงปรากฏว่าไม่อยู่กับที่เมื่อเทียบกับ พื้นผิวโลก... ข้อดีของ GSO: พื้นที่ให้บริการประมาณหนึ่งในสามของพื้นผิวโลก ดาวเทียมสามดวงเพียงพอสำหรับการสื่อสารเกือบทั่วโลก เสาอากาศสถานีภาคพื้นดินแทบไม่ต้องใช้ระบบติดตาม อย่างไรก็ตาม ในละติจูดเหนือ ดาวเทียมจะมองเห็นได้ในมุมเล็กๆ จนถึงขอบฟ้า และมองไม่เห็นเลยในบริเวณวงแหวน
ระนาบของวงโคจรระดับความสูงต่ำเอียงไปทางระนาบเส้นศูนย์สูตร (วงโคจรของขั้วโลกและกึ่งขั้วโลก) ด้วยระดับความสูงประมาณ 200..2000 กม. เหนือพื้นผิวโลก การปล่อยดาวเทียมแบบเบาขึ้นสู่วงโคจรต่ำสามารถทำได้โดยใช้ปืนกลราคาไม่แพง
หลักการทำงานของระบบสื่อสารโดยใช้ดาวเทียมดินเทียมดังแสดงในรูปที่ 9.2 ที่นี่ผ่าน a และ b สถานีภาคพื้นดิน (ES) ถูกกำหนดไว้ระหว่างที่มีการสร้างการสื่อสารและเส้นตรงและสัมผัสพื้นผิวโลกที่จุด a และ b เป็นเส้นขอบฟ้าของจุดเหล่านี้ ดังนั้น ดาวเทียม AES 1 ที่เคลื่อนที่ในวงโคจร MN สามารถสังเกตได้พร้อมกันจากสถานี a และ b เมื่อมันเคลื่อนที่ไปตามส่วนของวงโคจร u ดังนั้นการสั่นของคลื่นแม่เหล็กไฟฟ้าที่ปล่อยออกมาจากระบบเสาอากาศ ZP ที่จุด a ในทิศทางของ AES 1 สามารถรับได้โดยอุปกรณ์วิทยุออนบอร์ดของดาวเทียมและหลังจากการขยายและการแปลงความถี่จะมุ่งสู่โลกซึ่งจะได้รับ โดยเสาอากาศ ZP ที่จุด b. เสาอากาศ AP ควรหันไปทางดาวเทียมเสมอ ดังนั้นเมื่อดาวเทียมเคลื่อนที่ เสาอากาศจะต้องหมุน ดำเนินการ "ติดตาม" ของการเคลื่อนที่ของดาวเทียมในอวกาศอย่างต่อเนื่อง

ระบบวิทยุสื่อสารพร้อมอุปกรณ์ออนบอร์ดเรียกว่า ระบบที่มีรีเลย์สัญญาณแอ็คทีฟหรือระบบที่มีดาวเทียมแบบแอ็คทีฟ.
ให้เราพิจารณาแผนภาพโครงสร้างของการสื่อสารแบบดูเพล็กซ์ระหว่าง ES ซึ่งอยู่ที่จุด a และ b ที่มีการส่งสัญญาณซ้ำแบบแอ็คทีฟ (รูปที่ 9.3) ที่นี่ข้อความ C 1 ถูกส่งไปยังโมดูเลเตอร์ M ของสถานี 3S a ซึ่งเป็นผลมาจากการปรับการสั่นด้วยความถี่พาหะ f 1 การสั่นสะเทือนจากเครื่องส่งสัญญาณ P เหล่านี้จะถูกป้อนไปยังเสาอากาศ A a1 และแผ่ไปยังดาวเทียม โดยที่เสาอากาศ A ของตัวทวนสัญญาณจะรับไว้ จากนั้นการแกว่งที่มีความถี่ f 1 จะถูกป้อนไปยังตัวกรองครอสโอเวอร์ (RF) ซึ่งขยายโดยเครื่องรับ Pr 1 แปลงเป็นความถี่ f 2 และป้อนไปยังเครื่องส่งสัญญาณ P 1 จากเอาต์พุตของเครื่องส่งสัญญาณ การสั่นที่มีความถี่ f 2 จะถูกป้อนผ่าน RF ไปยังเสาอากาศ A ในตัว และแผ่ไปยังพื้นโลก การสั่นเหล่านี้ได้รับจากเสาอากาศ A b2 โดยสถานี ZS b ซึ่งส่งไปยังเครื่องรับ (Pr) และเครื่องตรวจจับ (Det) ที่เอาต์พุตซึ่งมีการจัดสรรข้อความ C 1 การส่งจาก ZS b ไปยังสถานี ZS a ของข้อความ C 2 เกิดขึ้นที่ความถี่ f 3 ในลักษณะเดียวกัน และตัวทวนสัญญาณออนบอร์ดจะแปลงการสั่นด้วยความถี่พาหะ f 3 เป็นการสั่นด้วยความถี่ f 4
สามารถเสนอวิธีอื่นในการส่งข้อความซึ่งไม่มีอุปกรณ์วิทยุบนดาวเทียม ในกรณีนี้ สัญญาณที่ส่งจากจุด A จะถูกสะท้อนโดยพื้นผิวของดาวเทียม 1 สู่พื้นโลก (รวมถึงจุด b) โดยไม่มีการขยายสัญญาณเบื้องต้น ดังนั้นสัญญาณที่ได้รับจากสถานี b จะอ่อนแอกว่าเมื่อมีอุปกรณ์ออนบอร์ดอยู่มาก เนื่องจากดาวเทียมแบบพาสซีฟสามารถใช้เป็นตัวสะท้อนแสงพิเศษในรูปทรงต่างๆ (ในรูปของบอลลูนทรงกลม รูปทรงหลายเหลี่ยมปริมาตร และอื่นๆ) และดาวเทียมธรรมชาติของโลก - ดวงจันทร์ ความสามารถของระบบสื่อสารดังกล่าวในระดับเทคโนโลยีปัจจุบันไม่เกินสองหรือสามข้อความทางโทรศัพท์
ในกรณีที่ดาวเทียม 2 AES เคลื่อนที่ในวงโคจร m – n (รูปที่ 9.2) ด้วยระดับความสูงที่ต่ำจนไม่สามารถสังเกตได้จากเสาอากาศของสถานี ZS a และ ZS b (ความสูงของวงโคจรอยู่ต่ำกว่าจุดตัดของเส้นขอบฟ้า) สายและ) ดังนั้นสัญญาณที่ได้รับบนอุปกรณ์บน AES 2 จึงไม่สามารถส่งไปยังสถานี b ได้ทันที การทำงานของระบบในกรณีนี้สามารถจัดโครงสร้างได้ดังนี้: AES 2 ที่บินผ่าน ZS และรับข้อความที่ป้อนไปยังอุปกรณ์หน่วยความจำบอท (เช่น บันทึกไว้ในเครื่องบันทึกเทป) หลังจากขยายสัญญาณแล้ว จากนั้น เมื่อ AES 2 บินผ่าน ZS b มันจะเชื่อมต่อกับตัวส่งสัญญาณบอทและข้อมูลที่ได้รับจาก ZS a จะถูกส่งต่อ สามารถเปิดเครื่องส่งโดยใช้สัญญาณคำสั่งพิเศษที่ปล่อยออกมาจาก ZS b ในขณะที่ดาวเทียมปรากฏในโซนการมองเห็นของสถานีนี้ หรือด้วยความช่วยเหลือของอุปกรณ์ซอฟต์แวร์บอทที่คำนึงถึงความเร็วของดาวเทียมใน วงโคจร ความสูง และระยะห่างระหว่างสถานี ระบบดังกล่าวเรียกว่าระบบสื่อสารหน่วยความจำหรือระบบรีเลย์ล่าช้า ระบบที่มีการถ่ายทอดสัญญาณแบบแอ็คทีฟ ขึ้นอยู่กับระดับความสูงของวงโคจรและระยะห่างระหว่างสถานี สามารถใช้เป็นระบบที่มีการถ่ายทอดสัญญาณทันที (ไม่ล่าช้า) (ระบบเรียลไทม์) และเป็นระบบที่มีการถ่ายทอดสัญญาณล่าช้า
สิ่งที่น่าสนใจเป็นพิเศษคือวงโคจรค้างฟ้า - วงโคจรวงกลมที่ตั้งอยู่ในระนาบเส้นศูนย์สูตร (i = 0) และอยู่ห่างจากพื้นผิวโลกประมาณ 36,000 กม. ในกรณีที่ทิศทางการเคลื่อนที่ของดาวเทียมในวงโคจรดังกล่าวตรงกับทิศทางการหมุนของโลก ดาวเทียมจะอยู่กับที่เมื่อเทียบกับผู้สังเกตการณ์ภาคพื้นดิน (ดาวเทียม geostationary) คุณลักษณะนี้ เช่นเดียวกับความจริงที่ว่าดาวเทียมอยู่ห่างจากโลกมาก นำไปสู่ข้อดีที่สำคัญของการสื่อสารผ่านดาวเทียม geostationary ดังต่อไปนี้: ขั้นแรก เป็นไปได้ที่จะส่งและรับสัญญาณโดยใช้ระบบเสาอากาศคงที่ (ที่ คือง่ายกว่าและถูกกว่ามือถือ) และประการที่สองการดำเนินการสื่อสารต่อเนื่องตลอด 24 ชั่วโมงในพื้นที่เท่ากับประมาณหนึ่งในสามของพื้นผิวโลก อย่างไรก็ตาม ผ่านดาวเทียม geostationary เป็นการยากที่จะสื่อสารกับบริเวณ circumpolar ซึ่งตั้งอยู่ที่ละติจูดเหนือ 75º… 78º เนื่องจากสิ่งนี้จะเพิ่มสัญญาณรบกวนที่อินพุตของเครื่องรับภาคพื้นดินอย่างมีนัยสำคัญ
ในประเทศของเรา ดาวเทียมสื่อสารเช่น "Raduga" และ "Horizon" ถูกนำเข้าสู่วงโคจรค้างฟ้า
เมื่อดาวเทียมเคลื่อนที่ไปตามวงโคจรอื่น (ไม่ใช่ geostationary) ดาวเทียมจะเคลื่อนที่สัมพันธ์กับผู้สังเกตการณ์ภาคพื้นดิน ในกรณีนี้ จำเป็นต้องใช้อุปกรณ์เสาอากาศเคลื่อนที่และอุปกรณ์พิเศษในการติดตามและกำหนดทิศทางเสาอากาศไปยังดาวเทียมที่กำลังเคลื่อนที่ ระบบการสื่อสารด้วยดาวเทียมเคลื่อนที่พร้อมตัวเลือกวงโคจรที่เหมาะสม ทำให้สามารถสื่อสารกับภูมิภาคต่างๆ ได้ โลกรวมทั้งขั้วโลก เมื่อใช้ดาวเทียมเคลื่อนที่ การสื่อสารระหว่างสถานีที่อยู่ในจุด a และ b (รูปที่ 9.2) สามารถทำได้เฉพาะในช่วงเวลาที่ดาวเทียมเคลื่อนที่ไปตามวงโคจรเท่านั้น
การสื่อสารอย่างต่อเนื่องในระยะยาวในวงโคจรที่ค่อนข้างต่ำจะทำได้ก็ต่อเมื่อเพิ่มจำนวนดาวเทียม (รูปที่ 9.4, a) ในกรณีนี้ ควรติดตั้งเสาอากาศสองเสา (A1 และ A2) ในแต่ละสถานีภาคพื้นดินซึ่งสามารถส่งสัญญาณได้ และรับสัญญาณโดยใช้ดาวเทียมดวงใดดวงหนึ่ง เช่น AES 1 ซึ่งอยู่ในโซนการสื่อสารระหว่างกัน เมื่อ AES 1 ออกจากบริเวณนี้ การสื่อสารจะเกิดขึ้นผ่าน AES 2 โดยใช้เสาอากาศ A 2 เมื่อ AES 2 ออกจากโซน การส่งและรับสัญญาณควรทำโดยใช้ AES 3 และเสาอากาศ A 1 ที่ส่งไปยังดาวเทียมดวงนี้ เป็นต้น เพื่อให้ได้การสื่อสารอย่างต่อเนื่องระหว่างสถานี a และ b ระยะห่างระหว่างดาวเทียมข้างเคียงต้องน้อยกว่าโซน จำนวนดาวเทียมด้วยวิธีนี้ขึ้นอยู่กับระยะห่างระหว่างจุดสื่อสารและพารามิเตอร์ของวงโคจร
เมื่อใช้ดาวเทียม สัญญาณสามารถถ่ายทอดได้ไม่เพียงแค่ทางเดียว แต่ยังส่งผ่านดาวเทียมหลายดวงด้วย ในกรณีนี้ ในกรณีของวงโคจรต่ำ สำหรับการส่งสัญญาณต่อเนื่องที่สถานีภาคพื้นดิน จำเป็นต้องมีเสาอากาศสองเสา
รูปที่ 9.4 b แสดงดาวเทียมที่เคลื่อนที่ตามเข็มนาฬิกาตามวงโคจรต่ำๆ ดวงหนึ่ง ซึ่งส่วนหนึ่งจะแสดงเป็น arc mn สัญญาณจากสถานี A ผ่านเสาอากาศ A1 เข้าสู่ AES 4 และส่งสัญญาณซ้ำผ่าน AES 3, AES 2, AES 1 ไปยังเสาอากาศรับ A 1 ของสถานี b ดังนั้น ในกรณีนี้ เสาอากาศ A1 และส่วนโคจรที่มี AES 4 - AES 1 จะใช้สำหรับการส่งสัญญาณซ้ำ เมื่อ AES 4 ออกจากโซนทางด้านซ้ายของเส้นขอบฟ้า การส่งและรับสัญญาณจะดำเนินการผ่านเสาอากาศ A 2 และส่วนที่มี AES 5 - AES 2 จากนั้นการส่งและรับสัญญาณจะดำเนินการโดยเสาอากาศ A1 และส่วนที่ประกอบด้วยดาวเทียม AES 6 - AES 3 เป็นต้น
รูปที่ 9.4. ระบบสื่อสารด้วยดาวเทียมหลายดวง
การใช้ดาวเทียมเคลื่อนที่ในวงโคจรระดับความสูงต่ำทำให้อุปกรณ์ของสถานีภาคพื้นดินง่ายขึ้น เนื่องจากในกรณีนี้ เป็นไปได้ที่จะลดเกนของเสาอากาศลงดิน พลังของเครื่องส่งสัญญาณ และการทำงานกับเครื่องรับที่มีอุณหภูมิเสียงเทียบเท่าที่สูงกว่าเล็กน้อย กรณีดาวเทียมค้างฟ้า อย่างไรก็ตาม ในกรณีนี้ จำนวนดาวเทียมจะเพิ่มขึ้น และจำเป็นต้องมีการควบคุมการเคลื่อนที่ในวงโคจร
กรณีการใช้งานอื่นสำหรับการถ่ายทอดสัญญาณจากดาวเทียมหลายดวงแสดงในรูปที่ 9.4, c. ในกรณีนี้ จากดาวเทียมกลุ่มหนึ่งที่เคลื่อนที่ในวงโคจรเดียวกัน เช่น AES 4 สัญญาณที่ปล่อยออกมาจาก A 1 ของสถานี "a" จะถูกส่งไปยังดาวเทียม geostationary ของ AES d และจากนั้นได้รับโดยเสาอากาศ A ของ สถานี "ข" เมื่อ AES 4 ออกจากพื้นที่ทางด้านซ้ายของเส้นขอบฟ้า การสื่อสารอย่างต่อเนื่องระหว่างสถานี "a" และ AES r จะดำเนินการผ่านเสาอากาศ A2 และ AES 5 จากนั้นผ่าน A1 และ AES 6 เป็นต้น ในกรณีนี้ที่สถานี "b" ก็เพียงพอที่จะมีเสาอากาศเพียงตัวเดียวที่ส่งไปยังดาวเทียมของเมืองมอสโก
เนื่องจากสามารถสังเกตดาวเทียมได้จากพื้นที่ขนาดใหญ่บนพื้นผิวโลก จึงเป็นไปได้ที่จะทำการสื่อสารระหว่าง ES หลายตัวผ่านดาวเทียมธรรมดาดวงเดียว ในกรณีนี้ ดาวเทียมจะ "พร้อมใช้งาน" สำหรับสถานีภาคพื้นดินหลายแห่ง ดังนั้นระบบนี้จึงเรียกว่าระบบ Multiple Access (MD) ในระบบ MD สามารถจัดระเบียบทั้งการสื่อสารแบบวงกลมระหว่างสถานี (การส่งข้อความจากสถานีหนึ่งไปยังหลายสถานี) และการสื่อสารดูเพล็กซ์พร้อมกันระหว่าง ES ทั้งหมดโดยใช้ทวนสัญญาณออนบอร์ดทั่วไปหนึ่งตัวที่อยู่บนดาวเทียม ระบบสื่อสารผ่านดาวเทียมกับ MD ประกอบด้วยสถานีภาคพื้นดินหลายแห่งตั้งอยู่ในโซนการสื่อสารซึ่งกันและกันผ่านดาวเทียมและใช้ตัวทำซ้ำร่วมกันบนดาวเทียมเพื่อการสื่อสารระหว่างกันหรือเพื่อการสื่อสารของสถานีเดียวกับหลายสถานีรวมกัน (รูปที่ 9.5) โปรดทราบว่าในระบบที่มี MD การสื่อสารพร้อมกันสามารถจัดระเบียบได้ไม่ใช่กับทุกสถานี แต่เฉพาะกับกลุ่มสถานีเท่านั้น ในกรณีนี้ ขอแนะนำให้ใช้เสาอากาศแบบออนบอร์ดที่มีรูปแบบการแผ่รังสีที่แคบ (อัตราขยายสูง) เสาอากาศดังกล่าวถูกควบคุมจากพื้นดินและสามารถนำไปยังกลุ่มสถานีที่ต้องการได้ อีกรุ่นหนึ่งของระบบนี้คือการเปลี่ยนอุปกรณ์ออนบอร์ดเป็นเสาอากาศออนบอร์ดหนึ่งหรือหลายเสาอากาศซึ่งมีทิศทางคงที่ไปยังจุดบางจุดบนพื้นผิวโลก ช่องทางการสื่อสารที่จัดผ่านดาวเทียมระหว่างสถานีภาคพื้นดินของระบบ MD สามารถแบ่งออกเป็นสองกลุ่ม:
- ช่องสัญญาณถาวร (คงที่) สำหรับการสื่อสารระหว่างสถานีภาคพื้นดินที่ระบุเท่านั้น
- ช่องสัญญาณไม่ถาวร (ไม่คงที่) จัดเรียงชั่วคราวระหว่างสถานีต่างๆ ขึ้นอยู่กับความต้องการของผู้บริโภค
เห็นได้ชัดว่าช่องทางของกลุ่มแรกช่วยให้สามารถสื่อสารได้ตลอดเวลา ช่องทางของกลุ่มที่สองสำหรับองค์กรของการสื่อสารต้องมีขั้นตอนบางอย่าง คล้ายกับช่องทางทั่วไปสำหรับการสื่อสารทางโทรศัพท์ในเมืองทั่วไป ก่อนถ่ายโอนข้อความผ่านช่องทางของกลุ่มที่สอง จำเป็น: เพื่อรับข้อมูลเกี่ยวกับการมีอยู่ของช่องสัญญาณฟรีในระบบ (นั่นคือเพื่อได้รับการยืนยันการเข้าถึงระบบการสื่อสาร - ใน PBX สิ่งนี้สอดคล้องกับ เสียงยาว); กดที่อยู่ (หมายเลข) ของผู้ติดต่อที่ต้องการ ตรวจสอบให้แน่ใจว่าช่องนั้นว่างสำหรับนักข่าว (นั่นคือ เพื่อเข้าถึงนักข่าว)
แน่นอน ในระบบที่มีช่องสัญญาณคงที่ เนื่องจากบางช่องจะถูกใช้ในช่วงเวลาหนึ่ง จำนวนช่องทั้งหมดควรมากกว่าในระบบที่มีช่องฟรี ดังนั้นระบบที่มีช่องสัญญาณที่ไม่คงที่จะมีประสิทธิภาพมากกว่า แต่ก็มีข้อเสีย: ประการแรกต้องใช้เวลาเพิ่มเติมเพื่อสร้างการสื่อสาร (คุณต้องค้นหาช่องฟรีและใช้สัญญาณการโทรและที่อยู่เพื่อดำเนินการเปลี่ยนที่จำเป็น) และประการที่สอง เป็นไปได้ที่จะปฏิเสธที่จะสร้างการเชื่อมต่อทันทีกับระบบ
ด้วยช่องทางการสื่อสารประเภทใดก็ได้ (คงที่หรือไม่คงที่) สามารถสร้างข้อความหลายผู้รับ unicast และผสมและลำต้นได้
ในการสร้างข้อความมัลติคาสต์ สถานีภาคพื้นดินแต่ละแห่งจะส่งเสียงแตรหนึ่งลำ ซึ่งข้อความมัลติคาสต์ถูกส่ง ซึ่งมีไว้สำหรับการรับโดยสถานีภาคพื้นดินทั้งหมด ลำต้นที่ปล่อยออกมาจาก ES ทั้งหมด เมื่อผ่านทวนสัญญาณออนบอร์ด จะได้รับที่ ES แต่ละรายการ หลังจากการ demodulation ส่วนต่างๆ ของข้อความกลุ่มที่มีไว้สำหรับ ES นี้เท่านั้นจะถูกดึงออกจากแต่ละ trunk การจัดสรรนี้ดำเนินการตามที่อยู่ของสถานีนี้ซึ่งถูกส่งก่อนข้อความ (ด้วยช่องสัญญาณที่ไม่คงที่) หรือโดยข้อตกลงล่วงหน้าเกี่ยวกับตำแหน่งของช่องสำหรับ ES นี้ในข้อความกลุ่มที่ส่ง (พร้อมช่องสัญญาณคงที่)
เห็นได้ชัดว่า ด้วยการสร้างข้อความกลุ่มแบบหลายผู้รับใน HF trunks ES แต่ละตัวจะต้องได้รับ n-1 trunk โดยที่ n คือจำนวนของ ES ดังนั้นในกรณีนี้จึงได้อุปกรณ์ส่งสัญญาณที่ค่อนข้างง่าย แต่อุปกรณ์รับสัญญาณของ ES นั้นซับซ้อนมาก
ในกรณีของการสร้างแบบ unicast ES แต่ละตัวจะสร้างข้อความกลุ่มของตัวเองและ HF trunk ของตัวเอง ซึ่งแต่ละสถานีส่งสัญญาณจะใช้จำนวนช่องสัญญาณที่สอดคล้องกัน ดังนั้นแต่ละสถานีจึงใช้ช่องสัญญาณจำนวนหนึ่งในลำต้น n-1 ที่ผ่านทวนสัญญาณซึ่งแต่ละสถานีมีไว้สำหรับสถานีภาคพื้นดินเพียงแห่งเดียวเท่านั้น ในกรณีนี้ ในแต่ละสถานี จำเป็นต้องรับและดีมอดูเลตเพียงสเตมเดียวสำหรับสถานีนั้น เห็นได้ชัดว่าอุปกรณ์ส่งสัญญาณมีความซับซ้อนกว่าอุปกรณ์รับ
ด้วยการสร้างรูปทรงแบบผสม การปรับรูปร่างของเพลาแบบหลายผู้รับจะดำเนินการที่สถานีต่อสายดินแต่ละสถานี และการเปลี่ยนจากการสร้างแบบหลายผู้รับไปเป็นการสร้างแบบ unicast ของเพลานั้นดำเนินการบนตัวทวนสัญญาณ กล่าวคือ มีการจัดเรียงช่องสัญญาณใหม่ ดังนั้นด้วยโครงสร้างแบบผสมของลำต้นทำให้ได้ความเรียบง่ายของอุปกรณ์รับและส่งสัญญาณของสถานีภาคพื้นดิน แต่อุปกรณ์ของทวนกลับกลายเป็นเรื่องที่ซับซ้อนมากขึ้น
มีสามวิธีหลักในการแบ่งช่องสัญญาณการสื่อสารทั่วไป: ในความถี่ (PD) ในเวลา (BP) และโดยสัญญาณที่มีรูปร่างแตกต่างกัน (การแบ่งรหัสของช่องสัญญาณ)
รูปที่ 9.6 การเข้าถึงหลายครั้งด้วยการแบ่งความถี่ (a) และเวลา (b)
การเข้าถึงหลายส่วนความถี่ (FDMA).
ในกรณีนี้ ความถี่พาหะที่แน่นอน (f 1, f 2, ..., f n) จะถูกจัดสรรสำหรับแต่ละลำตัว (นั่นคือ สำหรับแต่ละสถานี) ระยะห่างระหว่างคู่ของพาหะที่อยู่ติดกันนั้นถูกเลือกเพื่อไม่ให้เกิดความเป็นไปได้ของการซ้อนทับกันของสเปกตรัมในระหว่างการมอดูเลต (รูปที่ 9.6, a) โปรดทราบว่า FDMA นั้นใช้งานได้ง่ายที่สุดเมื่อทำการมอดูเลตความถี่ของการแกว่งที่สถานีภาคพื้นดินด้วยข้อความหลายช่องสัญญาณที่มีการแบ่งความถี่ของช่องสัญญาณโทรศัพท์ (ย่อว่าระบบ FDF FM FDMA) ดังนั้น ในระบบนี้ สัญญาณที่ซับซ้อนมาถึงอินพุตของทวนสัญญาณ ซึ่งเป็นระบบของสัญญาณฮาร์มอนิกที่มอดูเลตความถี่ n ซึ่งเป็นความถี่พาหะของ ES ทั้งหมด การส่งผ่านสัญญาณที่ซับซ้อนดังกล่าวผ่านทวนสัญญาณออนบอร์ดทั่วไป ซึ่งเป็นอุปกรณ์ที่ไม่เป็นเชิงเส้น นำไปสู่ปรากฏการณ์ที่ไม่พึงประสงค์ดังต่อไปนี้:
1) การเกิดขึ้นของ crosstalk;
2) การปราบปรามสัญญาณของสถานีภาคพื้นดินเหล่านั้น (นั่นคือลำต้นเหล่านั้น) ระดับที่อินพุตของตัวทำซ้ำด้วยเหตุผลบางประการ (เช่นเนื่องจากการซีดจาง) จะต่ำกว่าระดับสัญญาณของสถานีอื่น . การปราบปรามนี้สามารถสูงถึง 6 dB เพื่อขจัดปรากฏการณ์นี้ จำเป็นต้องมีการตรวจสอบและปรับระดับสัญญาณที่ปล่อยออกมาจากสถานีภาคพื้นดินอย่างเหมาะสม การปรับดังกล่าวสามารถทำได้โดยอัตโนมัติโดยการเปรียบเทียบระดับสัญญาณที่ได้รับจากทรานสปอนเดอร์จากเพลาต่างๆ (สถานี;
3) การเกิดขึ้นของ crosstalk ระหว่างลำต้นและการลดลงของกำลังขับของเครื่องทวนสัญญาณเนื่องจากความไม่เป็นเชิงเส้นของลักษณะแอมพลิจูดของสเตจทวนสัญญาณเหล่านั้นซึ่งเป็นเรื่องธรรมดาสำหรับลำต้นทั้งหมดที่ได้รับจากสถานีภาคพื้นดิน กำลังขับที่ลดลงเกิดจากการที่ผลิตภัณฑ์ไม่เชิงเส้นซึ่งกินพลังงานทวนสัญญาณส่วนหนึ่ง
ปรากฏการณ์ที่ระบุไว้นำไปสู่ความจริงที่ว่าด้วยค่าสัญญาณรบกวนชั่วคราวในช่องโทรศัพท์ที่มีการเพิ่มจำนวนสถานีภาคพื้นดินนั่นคือเมื่อจำนวนลำต้น (ผู้ให้บริการ) เพิ่มขึ้นพร้อมกันโดยทวนสัญญาณ จำเป็นต้องลดจำนวนข้อความทางโทรศัพท์ที่ส่งไปยังผู้ให้บริการแต่ละราย ดังนั้น ยิ่งรวมสถานีในระบบ FDMA มากเท่าใด ข้อความทางโทรศัพท์ก็จะยิ่งส่งน้อยลงเท่านั้น การคำนวณและทดสอบระบบจริงแสดงให้เห็นว่าเครื่องทวนสัญญาณสามารถส่งช่องสัญญาณโทรศัพท์ได้ 700 ช่องต่อผู้ให้บริการรายเดียวที่ FM FM ในกรณีของ 8 สถานีที่ทำงานในระบบ FM FM FDMA สามารถส่งได้ 30 ช่องต่อผู้ให้บริการแต่ละรายนั่นคือไม่มาก มากกว่า 8 30 = 240 ช่อง (ลดปริมาณงานลงเกือบ 3 เท่า) เมื่อใช้งาน 16 สถานีในระบบ PD คือ FM FDMA ผู้ให้บริการแต่ละรายจะส่งข้อความทางโทรศัพท์ได้ไม่เกินสิบข้อความ ดังนั้น เมื่อเทียบกับปริมาณงานเดิมคือ 23% อย่างไรก็ตาม ด้วยโหมดการทำงานนี้ เมื่อใช้คุณสมบัติทางสถิติของข้อความโทรศัพท์ที่ส่งไปยังผู้ให้บริการที่แตกต่างกัน จะมีโอกาสใหม่ในการเพิ่มปริมาณงานของเครื่องทวนสัญญาณ หากระหว่างการหยุดชั่วคราวระหว่างคำ วลี และระหว่างความเงียบของสมาชิกในระบบดังกล่าว ให้ระงับการแผ่รังสีของเครื่องส่งสัญญาณภาคพื้นดินที่ความถี่พาหะ ซึ่งจะช่วยลดภาระของเครื่องทวนสัญญาณและจะเพิ่มปริมาณงานได้ 3 ... 4 เท่า โปรดจำไว้ว่าการปราบปรามของผู้ให้บริการดังกล่าวใช้ในการสร้างอุปกรณ์สำหรับการแยกความถี่: ที่เอาต์พุตของคอนเวอร์เตอร์แต่ละตัว ระดับของการแกว่งที่มีซับแคริเออร์มักจะมีขนาดเล็กที่สุด
วิธี FDMA ที่ถูกระงับใช้ในระบบ Spade ที่ใช้งานในระบบระหว่างประเทศของ Intelsat ในระบบนี้ ข้อความโทรศัพท์แต่ละข้อความจะถูกแปลงเป็นสัญญาณ PCM แปดบิต (64 kbps) และส่งผ่านผู้ให้บริการ RF ที่แยกจากกันโดยใช้วิธี PM แบบสี่เฟส ย่านความถี่ที่ใช้โดยช่องสัญญาณโทรศัพท์หนึ่งช่องคือ 38 kHz ช่วงป้องกัน Δf prote = 7 kHz (รูปที่ 9.6, a) ระบบที่อธิบายนี้ให้การส่งสัญญาณในถังเดียวที่มีความกว้าง 36 MHz จาก 800 ช่องสัญญาณที่ไม่คงที่
อุปกรณ์ในประเทศ "Gradient N" ยังใช้ FDMA ซึ่งข้อความโทรศัพท์แต่ละข้อความจะถูกส่งไปยังผู้ให้บริการที่แยกจากกันโดย FM โดยมีค่าเบี่ยงเบนความถี่สูงสุดที่สอดคล้องกับระดับการวัดเท่ากับ 30 kHz จำนวนพาหะในลำตัวคือ 200 ระยะห่างระหว่างพาหะที่อยู่ติดกันคือ 160 kHz ในอุปกรณ์ภายในประเทศ "กลุ่ม" จำนวนผู้ให้บริการคือ 24; ระยะห่างระหว่างพวกเขาคือ 1.35 MHz การมอดูเลตความถี่ในอุปกรณ์รุ่นนี้ดำเนินการโดยกลุ่ม 12 ช่องสัญญาณมาตรฐาน (สเปกตรัม 12..60 kHz) โดยมีค่าเบี่ยงเบนความถี่ที่มีประสิทธิภาพ 125 kHz ดังนั้นจำนวนข้อความทางโทรศัพท์ที่ส่งคือ 24 · 12 = 288
การเข้าถึงหลายส่วนตามเวลา (TDMA).
ในกรณีนี้การทำงานของสถานีภาคพื้นดินผ่านทวนสัญญาณจะดำเนินการในทางกลับกัน ดังนั้น ทุกสถานีสามารถทำงานบนความถี่พาหะเดียวกัน และต้องมีระบบซิงโครไนซ์ร่วมที่รับรองการเปิดและปิดเครื่องส่งสัญญาณตามลำดับอย่างเคร่งครัด
รูปที่ 9.6 b แสดงวงจรการทำงานของระบบ TDMA ซึ่งประกอบด้วยสามสถานี - 1, 2 และ 3 ในช่วงเวลา τ ซึ่งเรียกว่าเฟรมของสถานี แต่ละสถานีปล่อยคลื่นความถี่พาหะที่มอดูเลตโดยข้อความที่มาจากอุปกรณ์แยก ; ผ่าน τ 3 ช่วงเวลาป้องกันจะถูกระบุซึ่งป้องกันการเปิดใช้งานพร้อมกันของสถานีภาคพื้นดินสองแห่งและผ่าน T c - รอบการส่ง ตัวแปรที่อธิบายไว้หมายถึงกรณีของการทำงานแบบซิงโครนัสของสถานีภาคพื้นดิน ระบบซิงโครไนซ์ซึ่งสามารถทำได้โดยใช้โทนเสียงนำควรคำนึงถึงความแตกต่างของระยะห่างระหว่างสถานีดาวเทียมและสถานีภาคพื้นดินแต่ละแห่ง โดยปกติ ระบบ TDMA จะทำงานกับดาวเทียม geostationary เนื่องจากเป็นการยากที่จะซิงโครไนซ์เมื่อใช้ดาวเทียมเคลื่อนที่ เนื่องจากในกรณีนี้ ระยะห่างระหว่างดาวเทียมกับสถานีภาคพื้นดินจะแปรผัน ในกรณีของ TDMA ตัวเลือกที่เป็นไปได้มากที่สุดคือการใช้ PCM กับการปรับเฟสของพาหะ (ย่อมาจาก PCM PM FDMA) รูปที่ 9.7 แสดงวงจรโดยละเอียดของระบบ TDMA เป็นตัวอย่าง จากรูปที่ในแต่ละเฟรมไม่เพียง แต่ข้อความที่ส่งผ่านโทรศัพท์และช่องทางการสื่อสารบริการเท่านั้นที่ถูกส่งจากสถานี แต่ยังส่งสัญญาณพิเศษอีกหลายอย่าง ซึ่งรวมถึง: การซิงโครไนซ์ สัญญาณการโทรและการสลับ (SViK) สัญญาณที่อยู่ (CA) และสัญญาณนำร่อง (PS) โปรดทราบว่า SViK ประกอบด้วยสัญญาณซิงโครไนซ์ของออสซิลเลเตอร์อ้างอิงที่มีการรับสัญญาณที่สอดคล้องกัน (SCS) สัญญาณการซิงโครไนซ์เฟรม (DS) สัญญาณที่จำเป็นในระบบที่มี PCM สำหรับการซิงโครไนซ์นาฬิกา (TC) และสัญญาณที่ให้การเรียกสมาชิกและการสลับวงจร (ซีซี) ...

ส่วนที่ให้ข้อมูลของเฟรมอยู่ที่ประมาณ 85 ... 90% ของความยาวเต็มของเฟรม
ระบบที่มี TDMA มีข้อได้เปรียบเหนือ FDMA หลายประการ:
1) กำลังพัลส์ของอุปกรณ์ส่งสัญญาณของสถานีที่กำหนดไม่ขึ้นอยู่กับสภาพการทำงานของสถานีอื่นและไม่ต้องการการปรับเปลี่ยนเนื่องจากไม่มีการระงับสัญญาณร่วมกัน
2) สถานีส่งสัญญาณภาคพื้นดินทั้งหมดสามารถทำงานบนความถี่พาหะหนึ่ง และรับสัญญาณในอีกความถี่หนึ่ง ซึ่งทำให้การสร้างสถานีง่ายขึ้น
3) เครื่องส่งสัญญาณทวนทำงานในโหมดพลังงานสูงสุด ในเวลาเดียวกันไม่มีการรบกวนระหว่างสัญญาณรีเลย์
ข้อเสียของระบบที่มี TDMA รวมถึงความซับซ้อนของระบบการซิงโครไนซ์สถานีและการรบกวนเมื่อการซิงโครไนซ์การทำงานของสถานีอย่างน้อยหนึ่งสถานีถูกรบกวน
การเปรียบเทียบ MD ประเภทต่างๆ ในแง่ของปริมาณงานสำหรับค่าสัญญาณรบกวนที่กำหนดที่เอาต์พุตของช่องสัญญาณ และกำลังการทวนสัญญาณที่จำกัดแสดงให้เห็นว่า TDMA มีข้อได้เปรียบที่ชัดเจนเหนือ FDMA
หลักการของ MDVR ถูกนำมาใช้ในอุปกรณ์ภายในประเทศ MDVU-40 ซึ่งทำให้สามารถดำเนินการอัตราการส่งข้อมูลแบบสตรีมแบบดิจิทัลในลำตัว AES เท่ากับ 40 Mbit / s ระบบนี้ใช้ OFM-4
9.2. คุณสมบัติของการส่งสัญญาณในอวกาศ
สัญญาณล่าช้า
ระยะทางไกลของสายสื่อสารระหว่างสถานีภาคพื้นดินกับเครื่องทวนสัญญาณบนดาวเทียมทำให้เกิดความล่าช้าของสัญญาณ สิ่งนี้พิจารณาจากข้อเท็จจริงที่ว่ามันต้องใช้เวลาในการเคลื่อนที่ของสัญญาณ m:
โดยที่ความยาวของสายสื่อสารจาก ES อยู่ที่จุด "a" ผ่าน IZS ไปยัง ES ซึ่งอยู่ที่จุด "b" (รูปที่ 4.1.2) s = 3 · 10 8 m / s - ความเร็วของแสง H คือระยะทางจากดาวเทียมถึงพื้นผิวโลก จากนี้ไป ที่ H = 36000 กม. (นั่นคือ ในกรณีของดาวเทียม geostationary) ความล่าช้าจะอยู่ที่ประมาณ 250 ms ความล่าช้าของสัญญาณระหว่างการส่งการสนทนาทางโทรศัพท์แบบดูเพล็กซ์ทำให้เกิดการหยุดชะงักในการสนทนาทำให้สูญเสีย "การติดต่อ" ระหว่างสมาชิกซึ่งก็คือการจำกัดความเป็นธรรมชาติของการสนทนา
เสียงสะท้อน
ความล่าช้าของสัญญาณนำไปสู่การปรากฏตัวของสัญญาณสะท้อนที่สังเกตได้สำหรับสมาชิกซึ่งเกิดขึ้นระหว่างการเปลี่ยนจากวงจรสื่อสารสี่สายไปเป็นวงจรสองสายเนื่องจากความไม่สมบูรณ์ของระบบดิฟเฟอเรนเชียล สัญญาณสะท้อนปรากฏในรูปแบบของการฟังโดยสมาชิกของการสนทนาของเขา ล่าช้าไปหนึ่งเท่าของเวลาการแพร่กระจายของสัญญาณระหว่างสมาชิก โดยคำนึงถึง (9.1)
สัญญาณสะท้อนจะสังเกตเห็นได้ชัดเจนเป็นพิเศษที่ค่า t echo มาก สำหรับระบบการสื่อสารที่ใช้ดาวเทียมเคลื่อนที่ในวงโคจรด้วยกม. (นั่นคือ สำหรับดาวเทียมค้างฟ้า) t echo ≈ 500 ms ในกรณีเหล่านี้ การลดทอนของสัญญาณก้องควรทำให้แน่ใจว่ามีค่าเท่ากับ 60 เดซิเบลที่สัมพันธ์กับระดับของสัญญาณที่ต้องการ การลดทอนสัญญาณสะท้อนที่จำเป็นจะดำเนินการโดยใช้ตัวป้องกันเสียงสะท้อน
เอฟเฟกต์ดอปเปลอร์
ลักษณะเด่นของระบบสื่อสารผ่านดาวเทียมประการหนึ่งคือการเกิดขึ้น ดอปเปลอร์เอฟเฟกต์เกิดจากการเคลื่อนตัวของดาวเทียมสัมพันธ์กับ ES ให้เราแสดงด้วย ν r ว่าองค์ประกอบของความเร็วของการเคลื่อนที่ AES ซึ่งตรงกับสายการสื่อสารทางวิทยุ AES - ZP และเราตกลงที่จะพิจารณาค่าของ ν r เชิงลบในกรณีที่ระยะห่างระหว่าง AES ลดลง และ ZP และบวกกับระยะที่เพิ่มขึ้นนี้
เป็นที่ทราบกันว่าเมื่อแหล่งสัญญาณเคลื่อนที่ด้วยความเร็ว ± ν r ความถี่ของการแกว่งที่ได้รับ f จะสัมพันธ์กับความถี่ของการแผ่รังสี f 0 ตามอัตราส่วน
![]() . (9.3)
. (9.3)
โดยที่ c คือความเร็วแสง
โดยปกติเงื่อนไข ν r / c<< 1, поэтому при движении источника сигнала в сторону приемника
![]() ... ดังนั้นความถี่ที่เปลี่ยนแปลงเกิดจากปรากฏการณ์ดอปเปลอร์
... ดังนั้นความถี่ที่เปลี่ยนแปลงเกิดจากปรากฏการณ์ดอปเปลอร์
เอฟเฟกต์ดอปเปลอร์จะเด่นชัดที่สุดในระบบการสื่อสารโดยใช้วงโคจรที่ไม่อยู่นิ่ง (ในระบบโมลนิยาในส่วนการทำงานของวงโคจร) ในระบบการสื่อสารกับดาวเทียม geostationary เอฟเฟกต์ Doppler สามารถเกิดขึ้นได้เมื่อแก้ไขตำแหน่งของดาวเทียมในวงโคจร
โปรดทราบว่า ตาม (9.4) ผลกระทบไม่เพียงแต่นำไปสู่การเปลี่ยนแปลงในความถี่ของการสั่นที่ปล่อยออกมา และด้วยเหตุนี้ความถี่พาหะ แต่ยังทำให้เกิดความผิดปกติของสเปกตรัมของข้อความที่ส่ง ดังนั้น หากการมอดูเลตกระทำโดยการแกว่งด้วยความถี่ F การสั่นที่ได้รับที่เอาต์พุตของเครื่องตรวจจับโดยคำนึงถึงผลกระทบของดอปเปลอร์จะมีความถี่ ![]() ... ดังนั้นเมื่อมอดูเลตโดยการสั่นด้วยความถี่ F 1 = 1 kHz และ F 2 = 10 4 kHz ที่เอาต์พุตของเครื่องตรวจจับที่เราได้รับความถี่ Hz และ Hz ตามลำดับ ประการแรก ความถี่บนในสเปกตรัมข้อความจะเปลี่ยนแปลงเป็นจำนวนมาก และประการที่สอง ความกว้างของสเปกตรัมของการสั่นสะเทือนที่ได้รับจะแตกต่างจากความกว้างของสเปกตรัมของการสั่นสะเทือนแบบมอดูเลต (ในตัวอย่างที่กำหนด โดยเกือบ 100 Hz)
... ดังนั้นเมื่อมอดูเลตโดยการสั่นด้วยความถี่ F 1 = 1 kHz และ F 2 = 10 4 kHz ที่เอาต์พุตของเครื่องตรวจจับที่เราได้รับความถี่ Hz และ Hz ตามลำดับ ประการแรก ความถี่บนในสเปกตรัมข้อความจะเปลี่ยนแปลงเป็นจำนวนมาก และประการที่สอง ความกว้างของสเปกตรัมของการสั่นสะเทือนที่ได้รับจะแตกต่างจากความกว้างของสเปกตรัมของการสั่นสะเทือนแบบมอดูเลต (ในตัวอย่างที่กำหนด โดยเกือบ 100 Hz)
ช่วงความถี่ปฏิบัติการของระบบสื่อสารผ่านดาวเทียม การเลือกย่านความถี่ที่จัดสรรสำหรับการทำงานของระบบสื่อสารผ่านดาวเทียมนั้นพิจารณาจากเงื่อนไขพื้นฐานดังต่อไปนี้:
ลักษณะเฉพาะของการแพร่กระจายของคลื่นแม่เหล็กไฟฟ้าผ่านชั้นบรรยากาศ
ความเข้มของเสียงที่เกิดจากการปล่อยคลื่นวิทยุจากแหล่งภายนอกต่างๆ (ดวงอาทิตย์ ดวงจันทร์ ดาวเคราะห์ บรรยากาศของโลก และอื่นๆ)
ความสามารถในการใช้งานระบบสื่อสารผ่านดาวเทียมในแถบความถี่ที่จัดสรรไว้ร่วมกับบริการวิทยุอื่น ๆ ที่ค่าการรบกวนทางวิทยุที่ยอมรับได้
ตามข้อบังคับของวิทยุ สำหรับภูมิภาค 1 (ยุโรป RF มองโกเลีย แอฟริกา) บริการดาวเทียมแบบประจำที่ ซึ่งรวมถึงระบบการสื่อสารผ่านดาวเทียม ถูกกำหนดคลื่นความถี่ต่อไปนี้ (ในช่วงสูงถึง 40 GHz):
สำหรับการส่งข้อความในส่วนของข้อความ Earth-AES 5.725 ... 7.075; 7.9 ... 8.4; 12.5 ... 13.25; 14.0 ... 14.8; 27.5 ... 31.0 GHz;
สำหรับการส่งข้อความในส่วนข้อความ AES - Earth 3.4 ... 4.2; 4.5 ... 4.8; 7.25 ... 7.75; 10.7 ... 11.7; 12.5 ... 12.75; 17.7 ... 21.2; 37.5 ... 40.5 กิกะเฮิร์ตซ์.
ควรสังเกตว่าแถบความถี่ที่ดีที่สุดสำหรับระบบสื่อสารผ่านดาวเทียมคือความถี่ในช่วง 2 ... 8 GHz
สัญญาณที่อินพุตของอุปกรณ์รับ ความแรงของสัญญาณที่อินพุตของเครื่องรับสามารถกำหนดได้โดยสูตร:
 . (9.5)
. (9.5)
โดยที่ ∑ คือการลดทอนสัญญาณทั้งหมดในส่วนระหว่างเสาอากาศ V (t) - ปัจจัยการลดทอนไม่เกินในช่วงเวลา t (%); A p และ A pr - กำหนดลักษณะตามลำดับการลดทอน (การลดทอน) ของสัญญาณในตัวกรองที่อยู่ระหว่างเอาต์พุตของเครื่องส่งสัญญาณและเสาอากาศและเอาต์พุตของตัวรับสัญญาณและเสาอากาศ ชั้น K - ค่าของการสูญเสียโพลาไรซ์เนื่องจากทั้งการไม่ระบุลักษณะโพลาไรซ์ของเสาอากาศและการเปลี่ยนแปลงในระนาบโพลาไรซ์ที่เกิดจากผลกระทบของฟาราเดย์
การประชุมเชิงปฏิบัติการ
ค้นหากำลังสัญญาณที่อินพุตของเครื่องรับของสถานีภาคพื้นดินที่: P ต่อ = 15 W; G เลน = 25 เดซิเบล; G pr = 47db; เลน f = 30 GHz การสูญเสียพลังงานในชั้นโทรโพสเฟียร์ A = 190 dB การสูญเสียโพลาไรซ์ K ชั้น = 7 dB ดาวเทียมอยู่นิ่ง
ในการแก้ปัญหาดังกล่าวให้ใช้สูตร (9.5) โดยที่ V = 1 ไม่มีการสูญเสีย Ap และ Ap ค่าทั้งหมดจะถูกป้อนลงในสูตรในหน่วย
ค่าของ A ∑ ถูกกำหนดโดยการลดทอนสัญญาณในพื้นที่ว่าง A b0 และการดูดกลืนในบรรยากาศที่มุมเงย β ในกรณีที่ไม่มีการตกตะกอน A a (β) ดังนั้น,
![]() . (9.6)
. (9.6)
ปริมาณ А а (β) η ขึ้นอยู่กับความยาวของเส้นทางของคลื่นวิทยุในชั้นบรรยากาศ ซึ่งสามารถระบุได้ด้วยมุมเงย β เส้นทางและการดูดกลืนจะน้อยที่สุดที่ β = 90º เมื่อคลื่นวิทยุข้ามบรรยากาศที่มุมฉาก และสูงสุดที่ β → 0 ในการพิจารณาการลดทอน ความสูงของสถานีเหนือระดับน้ำทะเลก็มีบทบาทเช่นกันตั้งแต่ เป็นลักษณะความยาวของเส้นทางลำแสงในบรรยากาศ ...
ในการคำนวณ А а (β) μ สามารถใช้เส้นโค้งที่แสดงในรูปที่ 9.8 โดยที่ค่าของการลดทอน а а а (β) δБ จะถูกพล็อตตามแกน abscissa นั่นคือ а а = 10 · lg А а ( บี)
ตัวคูณการลดทอนในระบบสื่อสารผ่านดาวเทียม
ปัจจัยการลดทอน V 2 (t) ถูกกำหนดโดยการดูดซับพลังงานแม่เหล็กไฟฟ้าในการตกตะกอนเท่านั้น (ฝน เมฆ และหมอก):
![]() . (9.7)
. (9.7)
โดยที่ g คือการลดทอนสัญญาณต่อความยาวหน่วย dB บนเส้นทาง 1 กม. R g คือความยาวของแทร็กกม. ซึ่งสังเกตการตกตะกอน ค่าของ g สำหรับฝนที่มีความเข้มต่างกันจะพิจารณาจากกราฟ
ค่าของ R g ซึ่งรวมอยู่ใน (9.7) กำหนดความยาวของเส้นทางที่ค่าสัมประสิทธิ์การลดทอน a g มีค่าคงที่โดยประมาณ สำหรับเส้นทางแนวตั้ง (β = 90º) สามารถสมมติค่า R g = 3 ... 4 กม. สำหรับแนวนอน (β = 0º) - ค่าของ R g ขึ้นอยู่กับความเข้มของฝน ที่ความเข้มหยาดน้ำฟ้า 1<10 мм/ч величина R g может доходить до нескольких сотен километров; при I=10 мм/ч R g =45…55 км; при I=25…30 мм/ч R g =30…35 км; в случае I ≥ 100 мм/ч R g =8…12 км.
ที่ความถี่ต่ำกว่า 8 GHz ค่าของ d จะน้อย ดังนั้นตาม (9.7) เราจะได้ V 2 (t) = 1 ดังนั้น ในระบบการสื่อสารผ่านดาวเทียมที่ความถี่ต่ำกว่า 8 GHz การซีดจางของสัญญาณสามารถละเลยได้ นี่เป็นข้อได้เปรียบที่สำคัญของระบบการสื่อสารเหล่านี้เมื่อเปรียบเทียบกับระบบ RRL และ TRL
ค่าของฟิลด์ K ที่รวมอยู่ใน (9.5) จะถูกกำหนดโดยลักษณะโพลาไรซ์ที่ไม่ตรงกันของเสาอากาศรับและส่งสัญญาณเท่านั้น เพื่อป้องกันการลดลงของค่า K field ในระบบสื่อสารผ่านดาวเทียม เสาอากาศที่มีโพลาไรซ์แบบวงกลมมักใช้ ซึ่งหากเสาอากาศได้รับการผลิตอย่างไม่ถูกต้อง สามารถเปลี่ยนเป็นรูปไข่ได้ เมื่อใช้เสาอากาศรับและส่งสัญญาณที่มีโพลาไรซ์เดียวกัน (เชิงเส้นหรือวงกลม) สามารถรับค่าของฟิลด์ K = 1 หากเสาอากาศทั้งสองมีโพลาไรซ์เชิงเส้นในระนาบมุมฉากร่วมกัน กล่าวคือ หากเสาอากาศหนึ่งได้รับการออกแบบสำหรับการแกว่ง ด้วยโพลาไรซ์แนวนอนและอื่น ๆ - ด้วยค่าแนวตั้งค่าของสนาม K = 0 นั่นคือไม่มีการเชื่อมต่อระหว่างเสาอากาศ ถ้าเสาอากาศตัวใดตัวหนึ่งมีโพลาไรซ์แบบวงกลม และอีกอันเป็นแบบเส้นตรง ค่า Kpol = 0.5 ซึ่งสอดคล้องกับกำลังรับที่ลดลง 2 เท่า
เสียงรบกวนที่อินพุตของอุปกรณ์รับ
ในระบบการสื่อสารผ่านดาวเทียม ซึ่งแตกต่างจากสายรีเลย์วิทยุในแนวสายตา จะใช้เครื่องรับที่มีสัญญาณรบกวนภายในที่ต่ำกว่าอย่างเห็นได้ชัด ดังนั้นกำลังรวมของสัญญาณรบกวนที่อ้างอิงถึงอินพุตของอุปกรณ์รับจะถูกกำหนดทั้งโดยขนาดของสัญญาณรบกวนจากความร้อนของตัวรับเอง Pt.in และโดยความเข้มของสัญญาณรบกวนจากแหล่งและวงจรต่างๆ ภายนอกไปยังตัวรับ แหล่งที่มาของเสียงรบกวนภายนอกอาจรวมถึง: การปล่อยคลื่นวิทยุจากบรรยากาศ เสียงโลกและเสาอากาศ ตลอดจนสัญญาณรบกวนจากความร้อนที่เกิดจากวงจรต่างๆ ที่เชื่อมต่อกับอินพุตของเครื่องรับ (ตัวป้อน ตัวกรอง และอื่นๆ) นอกจากนี้ ระดับเสียงรบกวนที่สำคัญที่อินพุตของเครื่องรับสามารถสร้างขึ้นได้จากแหล่งกำเนิดจากต่างดาว - การปล่อยคลื่นวิทยุจากดวงอาทิตย์ ดวงจันทร์ ดาวเคราะห์ และแหล่งกำเนิดวิทยุในอวกาศ ดังนั้นกำลังเสียงทั้งหมดที่อ้างถึงอินพุตของเครื่องรับคือ
ที่นี่ Р твх - พลังของเสียงของผู้รับเอง РФ - พลังของเสียงที่เกิดจากตัวป้อนและวงจรอื่น ๆ ที่อ้างถึงอินพุตของเครื่องรับ РАคือพลังของเสียงเสาอากาศโดยคำนึงถึงเสียงความร้อนของบรรยากาศและเสียงของโลกซึ่งอ้างอิงถึงอินพุตเสาอากาศ P k - พลังของเสียงที่เกิดจากการปล่อยคลื่นวิทยุจากดวงอาทิตย์, ดวงจันทร์, ดาวเคราะห์และแหล่งกำเนิดอวกาศซึ่งอ้างถึงทางเข้าเสาอากาศ η - ประสิทธิภาพของตัวป้อนและตัวกรอง ตั้งอยู่ระหว่างอินพุตเสาอากาศและอินพุตตัวรับสัญญาณ
โดยคำนึงถึงพลังงานเสียงที่เกี่ยวข้องกับอุณหภูมิเสียงที่เทียบเท่า T e การพึ่งพา
R w = kT อี P e, (9.9)
โดยที่ k คือค่าคงที่ Boltzmann และ P e คือแบนด์วิดท์ของเครื่องรับ นิพจน์ (4.2.8) สามารถเขียนใหม่เป็น
พิจารณาคำจำกัดความของปริมาณที่รวมอยู่ใน (9.10) สัญญาณรบกวนที่แท้จริงของเครื่องรับซึ่งอ้างอิงถึงอินพุตนั้น มักจะมีลักษณะเฉพาะด้วยสัญญาณรบกวน W หรืออุณหภูมิเสียงที่เทียบเท่า T e.pr. พารามิเตอร์เหล่านี้สัมพันธ์กันโดยความสัมพันธ์
T e.pr = T 0 (W-1),
โดยที่ T 0 = 290 K.
ค่าของ T e.pr และ W ถูกกำหนดโดยพารามิเตอร์ของขั้นตอนแรกของผู้รับเป็นหลัก ตัวรับที่มีแอมพลิฟายเออร์อินพุตสัญญาณรบกวนต่ำนั้นยากต่อการผลิตและใช้งาน ดังนั้น การเลือกอุปกรณ์รับสัญญาณ เช่น แอมพลิฟายเออร์อินพุตทางกลแบบควอนตัม ควรนำหน้าด้วยการเปรียบเทียบทางเทคนิคและเศรษฐกิจอย่างละเอียดของตัวแปรนี้ในการสร้างอุปกรณ์รับสัญญาณกับตัวเลือกอื่นๆ ที่เป็นไปได้ นอกจากนี้ การเลือกรูปแบบของอุปกรณ์รับอินพุตควรกำหนดโดยการเพิ่มมูลค่าของเสียงทั้งหมด ดังนั้นการเปรียบเทียบแอมพลิฟายเออร์ควอนตัมและพาราเมตริกจึงแสดงให้เห็นถึงความเหนือกว่าแบบไม่มีเงื่อนไขของรุ่นก่อนในแง่ของลักษณะเสียง อย่างไรก็ตาม แอมพลิฟายเออร์ควอนตัมต้องการพืชที่อุณหภูมิสูงกว่าด้วยฮีเลียมเหลวที่มีราคาแพงกว่า นอกจากนี้ยังมีโครงสร้างที่ซับซ้อนมากขึ้นเนื่องจากจำเป็นต้องสร้างสนามแม่เหล็กคงที่ แอมพลิฟายเออร์ทั้งสองมีค่าเท่ากันในเกนและแบนด์วิดท์ หากตัวป้อน (หรือองค์ประกอบเพิ่มเติม) อยู่ที่อุณหภูมิ T f = 290 ° K มีการลดทอน 0.1 dB (η = 0.977) อุณหภูมิเสียงที่เทียบเท่าจะอ้างอิงถึงเอาต์พุต (นั่นคือไปยังอินพุตของ ตัวรับ) T ef = 6.7 K ดังนั้นทุก ๆ สิบของเดซิเบลของการลดทอนของตัวป้อน (องค์ประกอบเพิ่มเติม) จะทำให้อุณหภูมิรวมที่อ้างอิงถึงอินพุตของเครื่องรับเพิ่มขึ้นประมาณ 7 K ดังนั้นความได้เปรียบของ การลดความยาวของตัวป้อนระหว่างตัวป้อนเสาอากาศและตัวรับ นั่นคือ การติดตั้งเครื่องขยายสัญญาณรับสัญญาณรบกวนต่ำอินพุตในบริเวณใกล้เคียงกับตัวป้อนเสาอากาศ
อุณหภูมิเสียงที่เท่ากันของเสาอากาศถูกกำหนดโดยผลกระทบจากการแผ่รังสีความร้อนของโลก การแผ่รังสีความร้อนของบรรยากาศ และเสียงที่แท้จริงของเสาอากาศที่เกิดจากการสูญเสียองค์ประกอบ โดยปกติ ความสูญเสียเหล่านี้มีขนาดเล็กมาก ดังนั้นจึงสามารถมองข้ามสัญญาณรบกวนภายในของเสาอากาศได้ ดังนั้นอุณหภูมิของเสาอากาศที่เทียบเท่ากันซึ่งคำนวณใหม่เป็นอินพุตคือ
![]() , (9.11)
, (9.11)
β - มุมเงย; T e.z, T e.a - อุณหภูมิเทียบเท่าของโลกและชั้นบรรยากาศตามลำดับ ซึ่งอ้างอิงถึงอินพุตเสาอากาศ
รูปที่ 9.9 แสดงเส้นโค้งที่กำหนดความขึ้นต่อกันของอุณหภูมิบรรยากาศที่เทียบเท่ากัน ลดลงเหลือเสาอากาศ T e.a บนความถี่ f และมุมเงย β กราฟเดียวกันนี้แสดงช่วงการเปลี่ยนแปลงโดยประมาณในอุณหภูมิที่เท่ากันของเสียงคอสมิก
รูปที่ 9.9 การพึ่งพาอุณหภูมิเสียงที่เท่ากันของแหล่งกำเนิดในอวกาศและบรรยากาศกับความถี่และมุมเงย
การตรวจสอบเส้นโค้งในรูปที่ 9.9 แสดงให้เห็นว่าเมื่อค่า β ลดลง ค่าของ Тe.а จะเพิ่มขึ้นอย่างรวดเร็วจนการใช้ค่า β<5º нецелесообразно. Следует отметить, что при малых β увеличивается вероятность от наземных радиотехнических средств и промышленных объектов. Максимумы на частотах 22.23 и 60 ГГц объясняются поглощением в водяных парах и кислороде атмосферы соответственно.
เส้นโค้ง (รูปที่ 9.9) หมายถึงสภาวะปกติของบรรยากาศในกรณีที่ไม่มีฝน ในกรณีที่ฝนตก T e.a จะเพิ่มขึ้น รูปที่ 9.10 แสดงผลการทดลองที่ความถี่ 6 GHz ที่มีความเข้มของฝนต่างๆ Curve 2 เกิดขึ้นพร้อมกับการพึ่งพาของ T e.a ในมุม β ที่แสดงในรูปที่ 9.9 สำหรับ 6 GHz
รูปที่ 9.10 - อุณหภูมิเสียงรบกวนของบรรยากาศ: 1 - ฝน 6.35 mm / g; 2 - เมฆฝนไม่มีฝน ไอน้ำ 5g / cm3
พิจารณาคำจำกัดความของอุณหภูมิที่เท่ากันของโลกซึ่งอ้างถึงอินพุตเสาอากาศ T e.z. ในระบบสื่อสารผ่านดาวเทียม ใช้เสาอากาศภาคพื้นดินที่มีอัตราขยายสูง โดยมีความกว้างของลำแสงประมาณหนึ่งองศาหรือน้อยกว่า เสาอากาศดังกล่าว ดังรูปที่ 9.9 ใช้ที่ β> 5… 7º เพื่อลดอุณหภูมิเทียบเท่าของสัญญาณรบกวนในบรรยากาศ ดังนั้นจึงสามารถสันนิษฐานได้ว่าการแผ่รังสีวิทยุจากพื้นโลก (เสียงดิน) จะได้รับผ่านกลีบด้านข้างของรูปแบบเสาอากาศภาคพื้นดินเท่านั้น สามารถอธิบายได้โดยใช้เส้นโค้งในรูปที่ 9.10 รูปแสดงการพึ่งพาของอุณหภูมิเสียงเสาอากาศที่ความถี่ 2 GHz ในมุมเงยสำหรับการฉายรังสีสองรูปแบบของกระจกเสาอากาศ (ตัวสะท้อนแสง) และแสดงค่าสัมพัทธ์ของสัญญาณรบกวนที่ตกลงมาบนกลีบหลักของไดอะแกรม และกลีบด้านข้างของซีกหน้าและซีกหลัง "น้ำหนัก" ที่สุดคือเสียงที่มาจากกลีบด้านข้าง และนี่คือเสียงที่กำหนดพื้นเสียงของเสาอากาศ เสียงเหล่านี้ส่วนใหญ่ขึ้นอยู่กับวิธีการฉายรังสีของกระจกเสาอากาศ: ด้วยการฉายรังสีที่คมชัดขึ้นที่ขอบของเสาอากาศกลีบด้านข้างมีขนาดเล็กลงและทำให้อุณหภูมิเสียงลดลง ควรสังเกตว่าในเวลาเดียวกันการใช้พื้นผิวเสาอากาศลดลงซึ่งนำไปสู่การลดขนาดที่เท่ากันของกระจกเสาอากาศ
เนื่องจากในทางปฏิบัติการตกของรังสีที่ขอบกระจกมักจะเท่ากับ 10 เดซิเบล ตามรูปที่ 9.11 สามารถสันนิษฐานได้คร่าวๆ ว่าเนื่องจากกลีบด้านข้าง อุณหภูมิเทียบเท่าโลก (K) หมายถึงอินพุต ของเสาอากาศของโลกคือ
ที่นี่ β กำหนดมุมเงยเป็นองศา
|
|
|
ดังนั้น ตามสูตร (9.11) และ (9.12) สำหรับเสาอากาศรับของสถานีภาคพื้นดิน
โดยที่ T e.a (β) ถูกกำหนดจากเส้นโค้งในรูปที่ 9.9 สำหรับค่าที่กำหนด β และความถี่ f
สำหรับเสาอากาศออนบอร์ดของดาวเทียมสื่อสารที่มุ่งสู่โลก สามารถสันนิษฐานได้ว่า Ω A> Ω s และ T s> T; ที่นี่ Ω A คือมุมทึบของกลีบหลักของเสาอากาศออนบอร์ด (sterad); Ω s คือมุมทึบของโลก "สังเกต" จากดาวเทียม (sterad); T z = 290º คืออุณหภูมิที่เท่ากันของโลก T คืออุณหภูมิที่เท่ากันของสภาพแวดล้อมและวัตถุที่ใกล้ที่สุดที่อยู่รอบเสาอากาศในตัว โดยพิจารณาว่านอกจากการแผ่รังสีจากโลกแล้วเสาอากาศบนเครื่องบินจะได้รับผลกระทบจากรังสีจากชั้นบรรยากาศที่ล้อมรอบโลกด้วย
ที่นี่ค่าของ Тe.а (90º) ถูกกำหนดตามเส้นโค้งในรูปที่ 9.9 สำหรับค่า β = 90º และความถี่ f
ในการจำแนกลักษณะการปล่อยคลื่นวิทยุจากแหล่งกำเนิดในอวกาศ มักใช้แนวคิดเรื่องอุณหภูมิความสว่าง T i ของแหล่งกำเนิด ซึ่งหมายถึงอุณหภูมิของวัตถุสีดำสนิท (K) ซึ่งมีความสว่างเท่ากันที่ความถี่ที่กำหนดและใน กำหนดทิศทางเป็นแหล่งที่พิจารณา
ในกรณีที่อุณหภูมิ สิ่งแวดล้อมในทิศทางที่แตกต่างจากเสาอากาศไม่เหมือนกันและโดดเด่นด้วยอุณหภูมิความสว่าง T i (β 0, ψ 0) โดยที่ β 0, ψ 0 เป็นพิกัดในระบบทรงกลมเพื่อกำหนด T ek จำเป็นต้องคูณ ค่าของ T i (β 0, ψ 0) บนเสาอากาศขยายในทิศทางที่สอดคล้องกัน G (β 0, ψ 0) และหาค่าเฉลี่ยทั่วทั้งทรงกลม ดังนั้นในทางปฏิบัติมักพบสองกรณีต่อไปนี้:
1. ค่าของ TI (β 0, ψ 0) เป็นค่าคงที่หรือเปลี่ยนแปลงเพียงเล็กน้อยภายในกลีบหลักของรูปแบบทิศทางของเสาอากาศ และรังสีที่ได้รับจากกลีบด้านข้างสามารถละเลยได้ สิ่งนี้ใช้เมื่อ Ω และ> Ω A โดยที่ Ω A คือความกว้างของเสาอากาศ ในกรณีนี้ T ek = T i
2. ขนาดเชิงมุมของแหล่งกำเนิดรังสี Ω และมีขนาดเล็กเมื่อเปรียบเทียบกับความกว้างของรูปแบบการแผ่รังสีของเสาอากาศ Ω A (นั่นคือ Ω และ< Ω з). При этом можно считать, что в пределах Ω и усиление G (β 0 ,ψ 0) = G max и потому
 . (9.15)
. (9.15)
การพึ่งพา T cp สำหรับดวงอาทิตย์และดาวเคราะห์ต่าง ๆ ตามความยาวคลื่นแสดงในรูปที่ 9.12
ขนาดของเส้นผ่านศูนย์กลางเชิงมุมของดวงอาทิตย์สำหรับผู้สังเกตการณ์ "ภาคพื้นดิน" คือและเส้นผ่านศูนย์กลางเชิงมุมของดวงจันทร์ที่ขอบรอบและจุดสุดยอดตามลำดับ ดังนั้น ความน่าจะเป็นที่จะชี้นำเสาอากาศรับไปยังดาวเคราะห์ดวงหนึ่งหรืออีกดวงหนึ่งเท่านั้น มีขนาดเล็ก แต่อย่างไรก็ตามด้วยสิ่งนี้รวมถึงความเป็นไปได้ที่จะได้รับรังสีจากเสาอากาศด้านข้างควรพิจารณา
อุณหภูมิความสว่างเฉลี่ยของการแผ่รังสีพื้นหลังจากอวกาศ ซึ่งอ้างถึงอินพุตของเสาอากาศ แสดงเป็นเส้นประสองเส้นในรูปที่ 9.9 บรรทัดบนแสดงถึงค่าสูงสุดและค่าต่ำสุดคือค่าอุณหภูมิต่ำสุด
จากที่กล่าวข้างต้น การคำนวณค่า T eq จำนวนหนึ่งร้อยรายการซึ่งรวมอยู่ในนิพจน์ (4.2.10) จะดำเนินการตามนิพจน์ (9.15) และการกำหนดลักษณะแผนภูมิที่แสดงในรูปที่ 9.9 ในกรณีที่เสาอากาศรับสัญญาณไม่ได้มุ่งตรงไปยังดวงอาทิตย์ ดวงจันทร์ ดาวเคราะห์ และแหล่งกำเนิดในอวกาศที่ไม่ต่อเนื่อง ค่า
T eq =, (9.16)
และถูกกำหนดตามภาพที่ 9.9
9.3. คุณสมบัติของฮาร์ดแวร์
อุปกรณ์ส่งสัญญาณสถานีโลก.
อุปกรณ์เหล่านี้คล้ายกับเครื่องส่งสายสื่อสารแบบโทรโพสเฟียร์ การมอดูเลตความถี่หรือเฟสของการแกว่งนั้นกระทำโดยวิธีที่ใช้ในสายรีเลย์วิทยุในแนวสายตาและในสายสื่อสารโทรโพสเฟียร์
รูปที่ 9.13 แสดงบล็อกไดอะแกรมของส่วนส่งสัญญาณของอุปกรณ์ "Gradient" ซึ่งทำงานในย่านความถี่ 5975 ... 6225 MHz และติดตั้งบนลำตัวแต่ละส่วนของสถานีภาคพื้นดิน (ES) ข้อความที่ส่ง (สัญญาณโทรศัพท์หลายช่องสัญญาณหรือสัญญาณโทรทัศน์พร้อมกับข้อความเสียง) จะถูกป้อนเข้า (In) ของโมดูเลเตอร์ (M) ในที่นี้ การปรับความถี่ของการแกว่งความถี่กลางจะดำเนินการ ซึ่งป้อนไปยังตัวแปลง PR ที่เอาต์พุตของ PR การสั่นของ FM จะได้รับในแถบความถี่ด้านบนด้วยกำลัง 3 W การขยายเสียงที่ตามมา (สูงสุด 3 หรือ 10 kW) จะดำเนินการในแอมพลิฟายเออร์ทรงพลัง (MU) บน klystrons โดยมีประสิทธิภาพอย่างน้อย 25% เอาต์พุต MU เชื่อมต่อกับสวิตช์ PC ด้วยความช่วยเหลือซึ่งคุณสามารถเชื่อมต่อ PR และ MU ชุดแรกหรือชุดที่สองกับอุปกรณ์เพิ่มเติม (US) และทำให้บล็อกเหล่านี้ซ้ำซ้อน (สลับเวลาเพื่อสำรอง ไม่เกิน 200 มิลลิวินาที) โปรดทราบว่าโดยสหรัฐอเมริกา อุปกรณ์ชุดเดียวกันหลายชุดสามารถเชื่อมต่อกับระบบเสาอากาศได้ กล่าวคือ เพื่อส่งผ่านเสาอากาศหลายลำผ่านเสาอากาศเดียว ซึ่งแต่ละสายกินพื้นที่ครึ่ง 34 เมกะเฮิรตซ์ ควบคุมงานดำเนินการโดยบล็อกเค
รูปที่ 9.13 บล็อกไดอะแกรมของอุปกรณ์ส่งสัญญาณ "Gradient"
อุปกรณ์ส่งสัญญาณของระบบสื่อสารผ่านดาวเทียมแตกต่างจากอุปกรณ์ส่งสัญญาณของระบบสื่อสารอื่น ๆ ที่กล่าวถึงในบทก่อนหน้านี้ โดยมีข้อ จำกัด ด้านพลังงานในอุปกรณ์เหล่านี้และแนะนำสัญญาณการกระจายพิเศษ
เครื่องรับสถานีภาคพื้นดิน.
หนึ่งในคุณสมบัติหลักของเครื่องรับสถานีภาคพื้นดินคือการใช้เครื่องขยายสัญญาณรบกวนต่ำที่อินพุตและเสาอากาศที่มีอัตราขยายสูงถึง 52 ... 60 dB
ให้เราพิจารณาบล็อกไดอะแกรมของอุปกรณ์รับ Orbit-2 (รูปที่ 9.14) ซึ่งคำนวณสำหรับการใช้งานในย่านความถี่ 3400 ... 3900 MHz การสั่นที่ได้รับจากเสาอากาศจะผ่านสวิตช์ของชุด P และป้อนอินพุตของแอมพลิฟายเออร์พาราเมตริกที่มีสัญญาณรบกวนต่ำ (LNA) ตัวใดตัวหนึ่ง จากนั้น - ไปยังอินพุตของคอนเวอร์เตอร์และพรีแอมพลิฟายเออร์ IF (PR; PUPCH) จากเอาต์พุตของ PUPCH การแกว่งจะถูกป้อนไปยัง IFA หลักและตัวตรวจจับความถี่ ซึ่งอยู่ในชั้นวาง P (St. P) ที่เอาต์พุตของชั้นวางนี้ ขึ้นอยู่กับชนิดของสัญญาณที่ได้รับ คุณสามารถรับข้อความโทรศัพท์แบบหลายช่องสัญญาณหรือสัญญาณภาพพร้อมเสียงได้ การแยกส่วนหลังดำเนินการโดยตัวกรอง F. รูปที่ 9.14 แสดงให้เห็นว่า LNA, PR และ PUPCH นั้นซ้ำซ้อนอย่างสมบูรณ์ การเปลี่ยนไปใช้สำรองจะดำเนินการโดยอัตโนมัติโดยสวิตช์ P โดยใช้อุปกรณ์ตรวจสอบและสำรอง (RR ) ภายใน 250 มิลลิวินาที พารามิเตอร์หลักของอุปกรณ์รับสัญญาณที่อธิบาย ได้แก่ อุณหภูมิเสียงรบกวนที่อ้างอิงถึงอินพุต - 80 ... 90 K; ปัจจัยการขยาย; LNA - 40 dB, PUPCH - 23 dB, เครื่องขยายเสียงหลัก 55 dB. ระบบ AGC รักษาระดับเอาต์พุต IF ด้วยความแม่นยำ ± 1 dB เมื่อระดับอินพุตเปลี่ยนแปลง ± 10 dB แบนด์วิดท์เส้นทาง 1 dB IF - 34 MHz, แบนด์วิดท์ 1 dB LNA - 250 MHz
รูปที่ 9.14 บล็อกไดอะแกรมของอุปกรณ์รับ Orbit-2
อุปกรณ์ Orbita-2 ช่วยให้สามารถสร้างตัวเลือกการรับหลายลำกล้อง สำหรับสิ่งนี้ จากเอาต์พุตของ LNA ดังแสดงในรูปที่ 9.14 การแกว่งจะถูกป้อนไปยังหน่วย PR ที่เชื่อมต่อแบบขนานหลายหน่วย ปั๊ก.
เสาอากาศ
อุปกรณ์รับและส่งสัญญาณใช้ระบบเสาอากาศที่มีอัตราขยาย 50 ... 60 dB และกลีบด้านข้างขนาดเล็ก - เสาอากาศแบบฮอร์น - พาราโบลาและพาราโบลาพร้อมตัวปล่อยซ้ำ (เสาอากาศ Cassegrain) นอกจากนี้ระบบเสาอากาศยังต้องติดตามการเคลื่อนที่ของดาวเทียมอย่างต่อเนื่อง นี่เป็นสิ่งจำเป็นแม้ในขณะที่ใช้ดาวเทียม geostationary เนื่องจากมีความไม่ถูกต้องในการโคจร พวกมันมีการกระจัดบางส่วนและต้องมีการแก้ไขการเคลื่อนไหว โปรดทราบว่าข้อกำหนดที่ทันสมัยกำหนดระยะห่างที่อนุญาตของดาวเทียม geostationary ± 0.1 เมื่อเทียบกับค่าเล็กน้อยของลองจิจูด ดังนั้นระบบเสาอากาศที่มีรูปแบบการแผ่รังสีแคบจึงต้องติดตั้งอุปกรณ์หมุนที่เหมาะสมเพื่อให้มั่นใจว่าการเคลื่อนที่ของเสาอากาศในอวกาศเป็นไปตามโปรแกรมที่คอมไพล์ไว้ล่วงหน้าหรือใช้ระบบติดตามพิเศษตามค่าสูงสุดของสัญญาณที่ได้รับจาก ดาวเทียม วิธีที่สองสามารถใช้ได้โดยตรงเฉพาะกับเสาอากาศรับเท่านั้น ซึ่งข้อมูลที่กำหนดทิศทางของเสาอากาศรับไปยังดาวเทียมจะถูกส่งไปยังระบบที่ควบคุมการเคลื่อนที่ของเสาอากาศส่งสัญญาณ เมื่อส่งข้อมูลเหล่านี้ จะมีการแก้ไขที่เหมาะสม โดยคำนึงถึงทั้งการแยกอาณาเขตของเสาอากาศรับและส่งสัญญาณ และการไม่ระบุตัวตนเชิงสร้างสรรค์ของเสาอากาศ
อุปกรณ์รับส่งสัญญาณออนบอร์ด.
ข้อกำหนดหลักประการหนึ่งสำหรับคอมเพล็กซ์ทั้งหมดที่เป็นส่วนหนึ่งของอุปกรณ์ดาวเทียมออนบอร์ดคือความน่าเชื่อถือสูง ซึ่งช่วยให้มั่นใจได้ว่าอุปกรณ์จะทำงานได้อย่างไม่มีปัญหาในอวกาศเป็นเวลานาน ต้องปฏิบัติตามข้อกำหนดนี้ไม่เฉพาะเฉพาะชิ้นส่วนและส่วนประกอบที่ประกอบขึ้นเป็นอุปกรณ์เท่านั้น แต่ยังต้องปฏิบัติตามวิธีการทางเทคโนโลยีที่ใช้ในการผลิตอุปกรณ์ด้วย ทางเลือกของรูปแบบอุปกรณ์ออนบอร์ดควรพิจารณาจากน้ำหนักขั้นต่ำ ขนาด และการใช้พลังงานขั้นต่ำ
รูปที่ 9.15 แสดงบล็อกไดอะแกรมของตัวรับส่งสัญญาณระบบสื่อสาร Molniya-1 การรับและการส่งสัญญาณดำเนินการโดยเสาอากาศทั่วไป A ซึ่งเชื่อมต่อกับอินพุตของเครื่องรับและเอาต์พุตของเครื่องส่งสัญญาณผ่านตัวแยกสัญญาณ P 1 และตัวกรอง Ф 1 และ Ф 2 สัญญาณที่มีความถี่พาหะ f 1 และ f 2 ที่ได้รับจากสถานีภาคพื้นดินจะถูกป้อนไปยังตัวแยกสัญญาณ Р 2 (รูปที่ 9.15) และผ่านตัวกรอง Ф 3 และ Ф 4 จะถูกป้อนไปยังเครื่องผสม Cm, UHR และตัวจำกัด Ogr หลังจากการปรับสมดุลโดยตัวจำกัดแอมพลิจูดของสัญญาณที่ได้รับ สัญญาณหลังจะถูกป้อนไปยังมิกเซอร์ ซึ่งความถี่ระดับกลางจะถูกแปลงเป็นความถี่ไมโครเวฟ จากนั้นสัญญาณที่มีความถี่พาหะ f 2 และ f 4 ผ่านตัวกรอง F 5 และ F 6 และตัวแยกสัญญาณ P 3 จะถูกป้อนไปยังแอมพลิฟายเออร์สองขั้นตอนบน TWT TWT ถูกระบายความร้อนด้วยของเหลวที่ไหลผ่านหม้อน้ำภายนอก ซึ่งแผ่ความร้อนออกสู่อวกาศ

รูปที่ 9.15 แผนภาพโครงสร้างของตัวทำซ้ำ Molniya-1
เพื่อให้แน่ใจว่าการทำงานในระยะยาวและเพิ่มความน่าเชื่อถือของสถานีรับส่งสัญญาณออนบอร์ดจึงใช้ชุดอุปกรณ์สำรองและระบบตรวจสอบอัตโนมัติซึ่งประกอบด้วยเครื่องจำลองการสั่นด้วยความถี่พาหะของสถานีภาคพื้นดิน (INZ) อุปกรณ์ควบคุมและวัด (CIU) อุปกรณ์เวลาโปรแกรม (PVU) และสวิตช์ของคอมเพล็กซ์ (KK) เมื่อพบชุดอุปกรณ์ที่ชำรุด ชุดดังกล่าวจะถูกแทนที่ด้วยชุดสำรองชุดใดชุดหนึ่งจากสองชุด
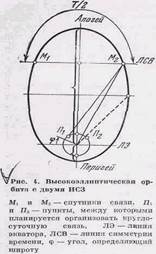
ลักษณะสำคัญของการส่งสัญญาณซ้ำของระบบสื่อสาร Molniya-1 คือ: ช่วงความถี่ - 800 ... 1,000 MHz; ความกว้างของรูปแบบทิศทางของเสาอากาศออนบอร์ดที่ระดับพลังงานครึ่งหนึ่ง - 22º; กำลังของเครื่องส่งสัญญาณออนบอร์ดเมื่อส่งสัญญาณโทรทัศน์คือ 40 W พร้อมการส่งการสนทนาทางโทรศัพท์แบบดูเพล็กซ์ 14 W ในแต่ละช่องสัญญาณความถี่สูง (ที่ความถี่ f 2 และ f 4) การเคลื่อนไหวของ AES - ในวงโคจรวงรีที่มีจุดสูงสุดประมาณ 40,000 กม. ในซีกโลกเหนือ, เส้นรอบวงประมาณ 500 กม. และความเอียงของวงโคจรประมาณ 65º; ระยะเวลาหมุนเวียนของดาวเทียมคือ 12 ชั่วโมง
ในปีพ. ศ. 2515 ดาวเทียม "Molniya-2" ได้เปิดตัวพร้อมกับทวนสัญญาณที่ทันสมัยซึ่งเครื่องส่งสัญญาณที่ทำงานในย่านความถี่ 4 GHz
คำถามควบคุม:
1. ระบุประโยชน์ของระบบสื่อสารผ่านดาวเทียม
2. ให้คำจำกัดความของวงโคจรค้างฟ้า
3. อธิบายหลักการสื่อสารโดยใช้ดาวเทียมโลกเทียม
4. ระบบใดคือระบบสื่อสารรีเลย์ล่าช้า?
5. อธิบายระบบการเข้าใช้หลายระบบ
6. อธิบายหลักการสร้างลำต้นแบบหลายผู้รับ
7. อธิบายหลักการแบ่งความถี่แบบ Multiple access
8. อธิบายหลักการแบ่งเวลาแบบ Multiple Access
9. อะไรทำให้สัญญาณล่าช้า?
10. เสียงสะท้อนสำหรับสมาชิกคืออะไร?
11. อะไรทำให้เกิดปรากฏการณ์ดอปเปลอร์?
12. อะไรเป็นตัวกำหนดทางเลือกของคลื่นความถี่ที่จัดสรรสำหรับการทำงานของระบบสื่อสารผ่านดาวเทียม?
13. ความแรงของสัญญาณที่อินพุตของเครื่องรับถูกกำหนดอย่างไร?
14. ให้สูตรสำหรับกำลังเสียงทั้งหมดที่อ้างถึงอินพุตของเครื่องรับ?
15. ให้บล็อกไดอะแกรมของอุปกรณ์ส่งสัญญาณ "Gradient"
16. ระบุคุณสมบัติหลักของทวนสัญญาณระบบสื่อสาร "Molniya-1"
( มหาวิทยาลัยเทคนิค)
คณะมนุษยศาสตร์.
บทคัดย่อในหัวข้อ:
"คุณสมบัติของดาวเทียมโลกเทียมในตัวอย่างระบบสื่อสารผ่านดาวเทียม"
เสร็จสมบูรณ์: นักศึกษากลุ่ม 10-202 Dobrotina E.G.
มอสโก 2001
วางแผน
ผม. บทนำ
II. ดาวเทียมโลกเทียมดวงแรก
สาม. ระบบสื่อสารผ่านดาวเทียม
IV. บทสรุป
ผม ... การแนะนำ
การพัฒนาอย่างรวดเร็วของนักบินอวกาศ ความก้าวหน้าในการศึกษาและการสำรวจอวกาศใกล้โลกและอวกาศระหว่างดาวเคราะห์ได้ขยายความเข้าใจของเราอย่างมากเกี่ยวกับดวงอาทิตย์และดวงจันทร์ ดาวอังคาร ดาวศุกร์ และดาวเคราะห์อื่นๆ การศึกษาชั้นบนของบรรยากาศ, ไอโอโนสเฟียร์, แมกนีโตสเฟียร์กลับกลายเป็นว่ามีประสิทธิภาพมาก ในเวลาเดียวกัน มีการใช้เทคโนโลยีอวกาศและเทคโนโลยีอวกาศใกล้โลกอย่างมีประสิทธิภาพที่สูงมากเพื่อประโยชน์ของธรณีศาสตร์หลายอย่าง .
การใช้ดาวเทียมดินเทียมสำหรับการสื่อสารและโทรทัศน์ การพยากรณ์สภาพอากาศและอุตุนิยมวิทยาในการปฏิบัติงานและในระยะยาว สำหรับการนำทางในเส้นทางเดินทะเลและเส้นทางอากาศ เพื่อให้ได้มาตรที่มีความแม่นยำสูง ศึกษาทรัพยากรธรรมชาติของโลกและติดตามถิ่นที่อยู่ กลายเป็นเรื่องธรรมดามากขึ้น ในระยะสั้นและในอนาคตอันไกลโพ้น การใช้เทคโนโลยีอวกาศและอวกาศที่หลากหลายในด้านเศรษฐกิจต่างๆ จะเพิ่มขึ้นอย่างมาก
ยุคของเรามีลักษณะเฉพาะด้วยข้อมูลที่เพิ่มขึ้นอย่างมากในทุกด้านของกิจกรรมของมนุษย์ นอกเหนือจากการพัฒนาที่ก้าวหน้าของวิธีการส่งข้อมูลแบบดั้งเดิม - โทรศัพท์, โทรเลข, วิทยุกระจายเสียง, ความจำเป็นในการสร้างรูปแบบใหม่ - โทรทัศน์, การแลกเปลี่ยนข้อมูลในระบบควบคุมอัตโนมัติและคอมพิวเตอร์, การถ่ายโอนเมทริกซ์สำหรับการพิมพ์หนังสือพิมพ์
ธรรมชาติของโลกของปัญหาเศรษฐกิจและการวิจัยทางวิทยาศาสตร์ต่างๆ การบูรณาการระหว่างรัฐในวงกว้างและความร่วมมือในการผลิต การค้า กิจกรรมการวิจัย การขยายการแลกเปลี่ยนในด้านวัฒนธรรมได้นำไปสู่การเพิ่มขึ้นอย่างมีนัยสำคัญในความสัมพันธ์ระหว่างประเทศและข้ามทวีปรวมถึงการแลกเปลี่ยนรายการโทรทัศน์
วิธีการสื่อสารแบบดั้งเดิมในแง่ของประเภท ปริมาณ ช่วง ประสิทธิภาพ และความน่าเชื่อถือของการส่งข้อมูลจะได้รับการปรับปรุงอย่างต่อเนื่อง อย่างไรก็ตาม การพัฒนาต่อไปของพวกเขาประสบปัญหามากมายทั้งในลักษณะทางเทคนิคและเศรษฐกิจ เป็นที่แน่ชัดแล้วว่าข้อกำหนดสำหรับปริมาณงาน คุณภาพ และความน่าเชื่อถือของช่องทางการสื่อสารทางไกลไม่สามารถตอบสนองได้อย่างเต็มที่ด้วยการสื่อสารทางสายและวิทยุภาคพื้นดิน
สายเคเบิลภาคพื้นดินและใต้น้ำทางไกลใช้เวลานานในการสร้าง ซับซ้อนและมีราคาแพง ไม่เพียงแต่ในการก่อสร้างเท่านั้น แต่ยังใช้งานอยู่ และสัมพันธ์กับ พัฒนาต่อไป... นอกจากนี้ สายเคเบิลทั่วไปมีแบนด์วิดท์ที่ค่อนข้างต่ำ สายเคเบิลศูนย์กลางบรอดแบนด์มีแนวโน้มดีที่สุด แต่ก็มีข้อเสียหลายประการที่จำกัดการใช้งาน
วิทยุมีแบนด์วิดท์ ช่วง และความสามารถในการสร้างใหม่สำหรับการสื่อสารประเภทต่างๆ แต่ลิงก์ทางวิทยุก็มีข้อเสียบางประการที่ทำให้ยากต่อการใช้งานในหลายกรณี
เนื่องจากช่วงที่จำกัด ระบบการสื่อสารด้วยคลื่นวิทยุคลื่นยาวพิเศษจึงมักใช้สำหรับความต้องการด้านการขนส่ง การนำทางทางอากาศ และสำหรับการสื่อสารประเภทพิเศษเท่านั้น
ลิงก์วิทยุคลื่นยาวเนื่องจากแบนด์วิดท์จำกัดและช่วงที่ค่อนข้างเล็ก ส่วนใหญ่จะใช้สำหรับการสื่อสารและการออกอากาศทางวิทยุในท้องถิ่น
ลิงค์วิทยุคลื่นสั้นมีช่วงที่เพียงพอและมีการใช้กันอย่างแพร่หลายในการสื่อสารหลายประเภทเพื่อวัตถุประสงค์ต่างๆ
วิธีใหม่ในการเอาชนะข้อบกพร่องโดยธรรมชาติของการสื่อสารทางวิทยุระยะไกลได้เปิดฉากการเปิดตัวดาวเทียมโลกเทียม (AES)
การปฏิบัติได้ยืนยันว่าการใช้ดาวเทียมเพื่อการสื่อสารโดยเฉพาะอย่างยิ่งสำหรับทางไกลระหว่างประเทศและข้ามทวีปสำหรับโทรทัศน์และ telecontrol เมื่อส่งข้อมูลจำนวนมากสามารถขจัดปัญหามากมาย นั่นคือเหตุผลที่ว่าทำไมระบบสื่อสารผ่านดาวเทียม (SSS) จึงได้รับแอปพลิเคชันที่รวดเร็ว กว้าง และหลากหลายอย่างที่ไม่เคยมีมาก่อน
II ... ดาวเทียมประดิษฐ์ดวงแรกของโลก
ความพยายามครั้งแรกในการยกประเด็นการสร้างดาวเทียมเทียมเกิดขึ้นในเดือนธันวาคม พ.ศ. 2496 ในระหว่างการเตรียมร่างมติคณะรัฐมนตรีเกี่ยวกับจรวด R-7 ได้เสนอว่า “ให้จัดแผนกวิจัยใน สอท.-88 ที่มีหน้าที่พัฒนางานที่มีปัญหาร่วมกับ Academy of Sciences ด้านการบินที่ระดับความสูงประมาณ 500 กม. ขึ้นไป ตลอดจนพัฒนาประเด็นที่เกี่ยวข้องกับการสร้าง ของดาวเทียมโลกเทียมและการศึกษาอวกาศระหว่างดาวเคราะห์โดยใช้ผลิตภัณฑ์" ...
งานนี้ได้รับการพิจารณาใน Design Bureau ไม่ใช่ครั้งเดียว แต่ด้วยความคาดหวังในการสร้างทิศทางพิเศษในการพัฒนาจรวด การกำหนดปัญหาขนาดใหญ่เช่นนี้จำเป็นต้องมีการเตรียมการเบื้องต้นเป็นจำนวนมากจนถึงการประเมิน ค่าใช้จ่ายของงานในอนาคตเกี่ยวกับการสร้างดาวเทียม
เมื่อวางแผนงานเกี่ยวกับดาวเทียม ข้อมูลเกี่ยวกับงานของสหรัฐอเมริกาในพื้นที่นี้เป็นจุดอ้างอิงบางประการ ประเด็นสำคัญยังคงเป็นข้อโต้แย้งหลักตลอดช่วงต่อๆ มาของการพัฒนาด้านอวกาศ ดังนั้นในรายงานก่อนอื่นเลยคือให้ รีวิวอย่างละเอียดสภาพการทำงานในต่างประเทศ ในเวลาเดียวกัน อาจกล่าวได้ว่าแนวคิดพื้นฐานแสดงให้เห็นว่า "AES เป็นขั้นตอนที่หลีกเลี่ยงไม่ได้ในการพัฒนาเทคโนโลยีจรวด หลังจากนั้นการสื่อสารระหว่างดาวเคราะห์จะเป็นไปได้" ให้ความสนใจกับข้อเท็จจริงที่ว่าในช่วง 2-3 ปีที่ผ่านมาความสนใจของสื่อมวลชนต่างประเทศเกี่ยวกับปัญหาการสร้างดาวเทียมและการสื่อสารระหว่างดาวเคราะห์เพิ่มขึ้น
สิ่งที่โดดเด่นที่สุดในเอกสารในหัวข้อนี้คือคำตัดสินเกี่ยวกับอนาคตของการทำงานกับดาวเทียม การพัฒนาดาวเทียมที่ง่ายที่สุดเป็นเพียงขั้นตอนแรกเท่านั้น ขั้นตอนที่สองคือการสร้างดาวเทียมที่ทำให้แน่ใจว่ามีการบินหนึ่งหรือสองคนในวงโคจร ขั้นตอนที่สาม ผลงาน - การสร้างสถานีดาวเทียมเพื่อการอยู่อาศัยระยะยาวของคนในวงโคจร เมื่อดำเนินโครงการนี้ ได้มีการเสนอให้ประกอบสถานีดาวเทียมจากส่วนต่างๆ ที่แยกจากกัน และส่งขึ้นสู่วงโคจรทีละดวง
งานเตรียมการสำหรับการปล่อยขีปนาวุธครั้งแรกดำเนินไปโดยมีปัญหาสำคัญและล่าช้ากว่ากำหนดเวลาที่กำหนดไว้ ในเวลาเดียวกัน นักออกแบบแสดงความมั่นใจว่า ด้วยการทำงานหนักในเดือนมีนาคม 2500 การยิงขีปนาวุธจะเริ่มขึ้น จรวดสามารถดัดแปลงเพื่อเปิดตัวเป็นดาวเทียม Earth เทียมซึ่งมีน้ำหนักบรรทุกเล็กน้อยในรูปแบบของเครื่องมือที่มีน้ำหนักประมาณ 25 กก. ... และภาชนะทรงกลมที่ถอดออกได้ของดาวเทียมเองที่มีขนาดเส้นผ่าศูนย์กลางประมาณ 450 มม. และน้ำหนัก 40-50 กก.
ดังนั้นในสหภาพโซเวียตจึงมีการสร้างจรวดขึ้นซึ่งสามารถพัฒนาความเร็ว8 .ได้ กม. / วินาทีเปิดตัวเมื่อวันที่ 4 ตุลาคม 2500 จรวดพุ่งขึ้นไปในแนวตั้งพร้อมกับเทียนไขทะลุสตราโตสเฟียร์ ดำเนินการโดยอุปกรณ์อัตโนมัติที่ทำงานตามโปรแกรมที่กำหนด จรวดปีนขึ้นไปกว่าสองร้อยกิโลเมตร ค่อยๆ เคลื่อนตัวในแนวนอนแล้วนอนบนเส้นทาง จำเป็นต้องทำสิ่งนี้อย่างแม่นยำมาก:
ความผิดพลาดระดับหนึ่งจะทำลายทุกสิ่ง แต่เครื่องจักรทำงานได้อย่างไม่มีที่ติ จรวดหยิบความเร็วที่ต้องการและส่งลูกบอลอลูมิเนียมอัลลอยด์แวววาวซึ่งเป็นดาวเทียมประดิษฐ์เครื่องแรกของโลกที่ผลิตในประเทศของเรา
8 กม.ต่อวินาที 28800 กม.เวลาหนึ่งนาฬิกา!
หากในช่วงเวลาใดที่ดาวเทียมอยู่เหนือออสเตรเลีย หลังจากนั้น 20 นาที - เหนืออลาสก้า หลังจากนั้นอีก 12 นาที - เหนือนิวยอร์ก - อีก 10 นาที - เหนือบราซิล เป็นเวลาครึ่งชั่วโมง - เที่ยวรอบโลก, 15 รอบต่อวัน และทุกครั้งบนเส้นทางใหม่ เพราะระนาบของวงโคจรของดาวเทียมในอวกาศนั้นหยุดนิ่ง และโลกหมุนรอบแกนของมันภายในวงโคจรนี้
ดาวเทียมดวงแรกมีขนาดเล็ก: เส้นผ่านศูนย์กลาง 58 ซม.น้ำหนัก - 83.6 กิโลกรัม.เขามีหนวดสองเมตร - เสาอากาศ ข้างใน - เครื่องส่งสัญญาณวิทยุสองเครื่อง ขี่ไปทั่วทุกประเทศทั่วโลกดาวเทียมประกาศว่ายุคของการเดินทางในอวกาศได้เริ่มขึ้นแล้วและยุคนี้เปิดโดยประเทศสังคมนิยม ดาวเทียมดวงที่สองและดวงที่สามตามเขาไปทั่วโลก
"เบบี้มูน" - "ลิตเติ้ลมูน" - ชาวอเมริกันตั้งฉายาว่าดาวเคราะห์ดวงแรกของเรา สายตาและวิทยุนับพันติดตามเที่ยวบินของเขา และทุก ๆ ชั่วโมงในชีวิตของเขาสนใจนักวิทยาศาสตร์ เป็นครั้งแรกที่ร่างกายทางโลกสูงขึ้นถึง 947 กม.เป็นครั้งแรกที่เครื่องส่งวิทยุทำงานที่ความสูงดังกล่าว

สัญญาณของมันแสดงให้เห็นว่าคลื่นวิทยุผ่านชั้นบรรยากาศที่มีกระแสไฟฟ้าบนทำให้เข้าใจโครงสร้างของชั้นบรรยากาศได้ลึกซึ้งยิ่งขึ้น
การส่งวิทยุต้องใช้พลังงาน มีพลังงานอยู่ในอวกาศ มันสามารถยืมมาจากดวงอาทิตย์ ปล่อยให้มันชาร์จแบตเตอรี่ด้วยรังสีของมัน แต่ดาวเทียมดวงแรกมีแบตเตอรี่ที่ชาร์จไฟไว้บนโลก พวกมันแห้งไปชั่วขณะหนึ่ง อย่างไรก็ตาม ดาวเทียมที่ปิดเสียงยังคงให้บริการวิทยาศาสตร์ต่อไป ที่ระดับความสูงที่สูงซึ่งเส้นทางของเขาวิ่งไปนั้นแทบจะไม่มีอากาศเลย ... แต่ก็ยัง "เกือบไม่" และไม่ใช่ "ไม่เลย" แม้ความหนาแน่นต่ำ อากาศจะต้าน และความเร็วของดาวเทียมจะค่อยๆ ลดลง ด้วยเหตุนี้จึงเป็นไปได้ที่จะกำหนดความหนาแน่นของบรรยากาศที่ระดับความสูงต่างกัน
คุณลักษณะบางอย่างในการเคลื่อนที่ของดาวเทียมบ่งบอกถึงแรงโน้มถ่วงที่ไม่สม่ำเสมอของโลก สิ่งนี้ทำให้เราสามารถชี้แจงรูปร่างและโครงสร้างของโลกของเรา เพื่อค้นหามวลหนักหรือเบาที่ซ่อนอยู่ใต้โลก
ตามทฤษฎีแล้ว วัตถุที่บินเหนือโลกด้วยความเร็ว 8 กม. / วินาทีจะไม่มีวันตก แต่ดาวเทียมดวงแรกไม่สามารถบินได้ตลอดไป แรงต้านอากาศเพียงเล็กน้อยทำให้เที่ยวบินช้าลงเมื่อเวลาผ่านไป พวกเขาลงไปและบินเข้าไปในชั้นอากาศหนาแน่นถูกไฟไหม้และพังทลาย
ตอนนี้จำเป็นต้องแก้ปัญหาที่สำคัญที่สุด: can สิ่งมีชีวิตเพื่อเปลี่ยนเที่ยวบินในอวกาศหรือจะต้องพินาศนอกชั้นบรรยากาศอย่างหลีกเลี่ยงไม่ได้? ดาวเทียมเทียมโซเวียตดวงที่สองซึ่งเปิดตัวเมื่อวันที่ 3 พฤศจิกายน 2500 ควรจะตอบคำถามนี้ ขึ้นสู่อวกาศได้สูงถึง 1670 กม.นักเดินทางคนแรก สุนัขไลก้า ออกเดินทาง อุปกรณ์พิเศษตรวจสอบการหายใจ ชีพจร ความดันโลหิตของเธอ เรารู้ว่าไลก้าเริ่มต้นได้ดีและเดินทางไกลรอบโลก บนดาวเทียมดินเทียมโซเวียตดวงที่สาม มีการติดตั้งอุปกรณ์ที่หลากหลายยิ่งขึ้นเพื่อศึกษาคุณสมบัติต่างๆ ที่ขาวยิ่งขึ้น ชั้นบรรยากาศของโลก, รังสีดวงอาทิตย์ ฯลฯ มีน้ำหนัก 1.3 ตัน และพลังงานสำรองสำหรับการจ่ายพลังงานให้กับอุปกรณ์ได้รับการเติมเต็มเนื่องจากการกระทำของแสงแดดบนอุปกรณ์ที่ติดตั้ง ต่อมามีการปล่อยดาวเทียมเทียมหลายดวงในสหรัฐอเมริกา
ดาวเทียมโซเวียตดวงที่สามกลายเป็นดาวเทียมที่ทนทานและหนักที่สุด ชาวโซเวียตสามารถโยนโครงสร้างที่มั่นคงขนาดเท่ารถเข้าไปในอวกาศได้
สาม ... ระบบสื่อสารผ่านดาวเทียม
เป็นที่น่าสนใจว่าแนวคิดในการใช้ดาวเทียมโลกเทียมเพื่อการสื่อสารนั้นได้แสดงออกมาก่อนการปล่อยดาวเทียมดวงแรก ในปี 1945 นักวิทยาศาสตร์โซเวียตผู้โด่งดัง P.V. Shmakov เสนอแนวคิดในการใช้ดาวเทียมเพื่อจัดรายการโทรทัศน์โลก
หลักการของการใช้ดาวเทียมเพื่อวัตถุประสงค์ในการสื่อสารคืออะไร และเหตุใดระบบดาวเทียมจึงทำให้สามารถเอาชนะปัญหามากมายที่เกิดขึ้นเมื่อจัดระเบียบการสื่อสารโดยใช้วิธีการแบบเก่าและดั้งเดิมได้
เป็นที่ทราบกันดีอยู่แล้วว่าลูกบอลสะท้อนคลื่นแม่เหล็กไฟฟ้าอย่างสม่ำเสมอในทุกทิศทาง และพื้นผิวสะท้อนแสงที่มีประสิทธิภาพของลูกบอลนั้นแปรผันตามกำลังสองของเส้นผ่านศูนย์กลาง การเพิ่มคุณสมบัติสะท้อนแสงของลูกบอลดังกล่าวสามารถทำได้โดยการเพิ่มเส้นผ่านศูนย์กลาง บอลลูนถูกเป่าลมหลังจากที่ดาวเทียมถูกนำเข้าสู่วงโคจรโดยวิธีการระเหิด เปลือกหุ้มมีฟิล์มป้องกันและสารเคลือบโลหะพิเศษ ลูกบอลประกอบด้วยส่วนเส้นเมอริเดียนที่แยกจากกัน ส่วนที่เป็นโลหะทรงกลมที่วางทับบนทรงกลมทำให้เกิดการสัมผัสทางไฟฟ้าระหว่างส่วนเมอริเดียลทั้งหมด
แม้จะมีความเรียบง่ายที่เห็นได้ชัด ต้นทุนต่ำและข้อดีทางเทคนิคบางประการของระบบสื่อสารผ่านดาวเทียม ในไม่ช้าข้อบกพร่องร้ายแรงของระบบนี้ก็ปรากฏขึ้น เพื่อรักษาการสื่อสารที่เสถียร ต้องใช้กำลังส่งสูงและความไวสูงของอุปกรณ์ภาคพื้นดินรับ แต่ถึงแม้จะตรงตามเงื่อนไขเหล่านี้ สายวิทยุก็ทำงานได้ไม่เสถียรเพียงพอ แต่ก็ได้รับผลกระทบจากสัญญาณรบกวน อายุการใช้งานของดาวเทียมดังกล่าวเนื่องจากการเปลี่ยนแปลงรูปร่าง การบีบอัดของซองจดหมาย และการเสื่อมสภาพของคุณสมบัติการสะท้อนแสง รวมทั้งเนื่องจากการสูญเสียความสูงอย่างรวดเร็ว จึงกลายเป็นว่ามีขนาดเล็ก
อย่างไรก็ตาม ดาวเทียมเคลื่อนที่ในอวกาศอย่างต่อเนื่องและไม่สามารถอยู่ในโซนการมองเห็นร่วมกันของจุดต่างๆ ที่ต้องการการสื่อสารได้ CCC ทำงานอย่างไร หากจำเป็นต้องมีการเชื่อมต่อระยะยาว หลายชั่วโมง หรือแม้แต่ตลอด 24 ชั่วโมงระหว่างจุดที่กำหนด
วิธีแก้ปัญหาที่เป็นไปได้ประการหนึ่งสำหรับปัญหานี้คือการส่งดาวเทียมจำนวนดังกล่าวเข้าสู่วงโคจรที่เหมาะสม ทันทีที่หนึ่งในนั้นออกจากโซนการมองเห็นวิทยุร่วมของจุดที่ต้องการการสื่อสาร ดาวเทียมอีกดวงจะเข้าสู่โซนนี้ทันที . อย่างไรก็ตาม แม้จะมีดาวเทียมจำนวนมากพอสมควร หากตำแหน่งในวงโคจรเป็นแบบสุ่ม ก็เป็นไปได้ว่าจะไม่มีดาวเทียมอยู่ในโซนการมองเห็นร่วมของจุดสองจุดที่ต้องการการสื่อสาร
อะไรเป็นตัวกำหนดจำนวนดาวเทียมที่จำเป็นสำหรับการสื่อสารอย่างต่อเนื่อง? เห็นได้ชัดว่ายิ่งระดับความสูงของวงโคจรสูงขึ้นเท่าใด การมองเห็นร่วมของดาวเทียมตามจุดภาคพื้นดินก็จะยิ่งยาวขึ้น
ความเอียงเป็นเงื่อนไขที่สำคัญที่สุดสำหรับระบบสื่อสารผ่านดาวเทียมเพื่อให้ครอบคลุมพื้นที่บางส่วนของโลก ซึ่งเป็นพื้นที่ให้บริการที่กำหนด ในการเชื่อมต่อกับหลัก หนึ่งอาจกล่าวอย่างเด็ดขาด บทบาทของวงโคจร AES ในระบบการสื่อสารผ่านดาวเทียม อย่างน้อยก็เป็นเวลาสั้น ๆ ที่จะต้องอาศัยประเภทและแนวคิดหลักบางประเภท
วงโคจรเป็นวงกลมคือวงโคจรที่ระยะห่างจากดาวเทียมถึงศูนย์กลางของโลกจะคงที่โดยประมาณ วงรีวงรี - เมื่อดาวเทียมเคลื่อนที่รอบโลกในแนวโค้งใกล้กับวงรี ระยะห่างสูงสุดจากโลก (apogee) และต่ำสุด (perigee) อาจแตกต่างกันอย่างมาก รูปร่างของวงรีถูกกำหนดโดยค่าความเยื้องศูนย์กลางของมัน (อัตราส่วนของความแตกต่างในระยะทางจากศูนย์กลางของโลกถึงจุดสุดยอดและเส้นรอบวงต่อแกนหลักของวงรี) วงโคจรที่มีความเยื้องศูนย์สูงจะมีจุดสูงสุดและเรียกว่าวงรีสูง
ทางเลือกของรูปร่างของวงโคจร (วงกลม, วงรี, วงรีสูง), ความเอียง (ขั้ว, เอียงด้วยมุมเอียงที่กำหนด, เส้นศูนย์สูตร), ค่าของคาบและธรรมชาติของวงโคจรรอบโลก (ซิงโครนัส, geostationary) มีความเด็ดขาดในการออกแบบระบบสื่อสารผ่านดาวเทียมอย่างใดอย่างหนึ่งและคิวจะถูกกำหนดโดยงานของระบบที่ออกแบบ
จากการเปิดตัวครั้งแรก ดาวเทียมสื่อสารมักจะสร้างระบบขึ้นมา ไม่ค่อยใช้ระบบสื่อสารผ่านดาวเทียมเดี่ยวแบบกว้างๆ
ในระบบสื่อสารผ่านดาวเทียม มีการใช้ LEO ดาวเทียมวงรีสูงและ geostationaries
ระบบสื่อสารโดยใช้ดาวเทียมโคจรต่ำ
ดาวเทียมโคจรต่ำเป็นดาวเทียมดวงแรกที่ใช้เพื่อการสื่อสาร
โดยเฉพาะอย่างยิ่งสิ่งนี้อธิบายได้ด้วยความจริงที่ว่าการปล่อยดาวเทียมสู่วงโคจรต่ำนั้นง่ายกว่าและดำเนินการด้วยต้นทุนพลังงานต่ำที่สุด การเปิดตัวดาวเทียมสื่อสารวงโคจรต่ำครั้งแรกแสดงให้เห็นถึงความเป็นไปได้และความเป็นไปได้ของการใช้ดาวเทียมเพื่อการสื่อสาร ซึ่งยืนยันความถูกต้องของหลักการทางเทคนิคของการถ่ายทอดแบบแอคทีฟ ในเวลาเดียวกัน จากประสบการณ์ครั้งแรกของการใช้ดาวเทียมในวงโคจรต่ำ เป็นที่แน่ชัดว่าพวกเขาไม่สามารถให้วิธีแก้ไขปัญหาการสื่อสารผ่านดาวเทียมที่มีประสิทธิผลเพียงพอ
เพื่อขยายพื้นที่และเพิ่มระยะเวลาของ SSS คาดว่าจะไปตามเส้นทางการเพิ่มจำนวนดาวเทียมในระบบ อย่างไรก็ตาม ในไม่ช้ามันก็ชัดเจนขึ้นว่าระบบสื่อสารหลายดาวเทียมที่ใช้ดาวเทียม LEO ในฐานะระบบสาธารณะมีความไม่สะดวกในการปฏิบัติงานมากมายและไม่เป็นประโยชน์
ในระบบสื่อสารของ LEO ดาวเทียมสามารถวางในช่องว่างที่สัมพันธ์กันแบบสุ่มหรือเป็นระเบียบ ด้วยตำแหน่งแบบสุ่ม จะต้องใช้ดาวเทียมจำนวนมากขึ้น แต่ตำแหน่งที่ได้รับคำสั่งในอวกาศจะต้องใช้ความพยายามอย่างมากในการสร้างและรักษาตำแหน่งสัมพัทธ์ที่ให้ไว้ สิ่งนี้ต้องการการตรวจสอบตำแหน่งของดาวเทียมอย่างต่อเนื่องและการแก้ไขวงโคจรอันเนื่องมาจากวิวัฒนาการของพวกมันในระหว่างการบิน
ข้อดีของ SCS ในวงโคจรต่ำ ได้แก่ ตามที่ระบุไว้แล้ว ต้นทุนที่ค่อนข้างต่ำในการนำพวกมันเข้าสู่วงโคจรและอุปกรณ์ออนบอร์ดที่ง่ายกว่า ข้อเสียคือ ความยากลำบากในการรักษาการสื่อสารตลอด 24 ชั่วโมงอย่างต่อเนื่อง ความซับซ้อนของอุปกรณ์ภาคพื้นดิน ต่อเนื่องจากการใช้อุปกรณ์ติดตามเสาอากาศทำให้อายุยานอวกาศสั้นลง
LEO CVS มีประสิทธิภาพในกรณีที่ไม่จำเป็นต้องมีการสื่อสารแบบสองทางต่อเนื่อง (เช่น เฉพาะการส่งข้อมูลเป็นระยะเท่านั้น)
ระบบการสื่อสารกับดาวเทียมในวงโคจรวงรีสูง
เพื่อหลีกเลี่ยงข้อเสียที่มีอยู่ในระบบสื่อสารผ่านดาวเทียมในวงโคจรต่ำ จำเป็นต้องเพิ่มระดับความสูงของวงโคจร วงโคจรดังกล่าวมีสองรูปแบบคือแบบวงกลมสูงและวงรีสูง ในบางกรณี การปล่อยดาวเทียมขึ้นสู่วงโคจรวงรีสูงมีข้อดีบางประการ
เนื่องจากความสูงของวงโคจร ระยะเวลาในการสื่อสารจะเพิ่มขึ้น ยิ่งไปกว่านั้น จะเพิ่มขึ้นเพิ่มเติมเนื่องจากอัตราส่วนของเวลาในการมองเห็นของดาวเทียมที่ตั้งอยู่ใกล้กับจุดสุดยอดในเขตที่กำหนดต่อระยะเวลาของการปฏิวัติสำหรับดาวเทียมที่มีวงโคจรเป็นวงรีนั้นสูงขึ้นอย่างมาก
ตามกฎของกลศาสตร์ท้องฟ้า (กฎข้อที่สองของเคปเลอร์) เมื่อดาวเทียมเคลื่อนที่ในวงโคจรวงรี ความเร็วเชิงมุมของมันจะต่ำกว่าเมื่ออยู่ห่างจากศูนย์กลางของโลก กล่าวอีกนัยหนึ่ง ดาวเทียมเคลื่อนที่ได้ช้ากว่ามากในบริเวณจุดสุดยอดมากกว่าในภูมิภาคเพอริจี ในการพิจารณาพารามิเตอร์ที่คำนวณได้ของวงโคจรของดาวเทียมสื่อสาร แน่นอน ลักษณะพลังงานของยานยิง ความสามารถของคอสโมโดรมและคอมเพล็กซ์คำสั่งและการวัด และปัจจัยอื่น ๆ ที่กำหนดการปล่อยดาวเทียมสู่วงโคจรและการควบคุม ในเที่ยวบินจะถูกนำมาพิจารณาด้วย
ดาวเทียมที่มีวงโคจรเป็นวงรี ได้แก่ ดาวเทียมสื่อสาร American Telstar (perigee ประมาณ 1,000 กม. จุดสุดยอดประมาณ 11 พันกิโลเมตร)
ดาวเทียมสื่อสารของโซเวียตประเภท Molniya เป็นตัวอย่างที่ดีของดาวเทียมที่มีวงโคจรเป็นวงรีสูง สำหรับดาวเทียมของคลาสนี้เลือกวงโคจรที่มีจุดสุดยอดเหนือซีกโลกเหนือประมาณ 40,000 กม. และระยะทางประมาณ 500 กม. โดยมีความเอียง 65 °และระยะเวลาการโคจร 12 ชั่วโมง มอสโกและ ตะวันออกไกลภายใน 8-9 ชั่วโมงในหนึ่งวง
โครงสร้างการโคจรของระบบสื่อสารผ่านดาวเทียม (จำนวนดาวเทียม โคจร และตำแหน่งสัมพัทธ์ในอวกาศ) ถูกกำหนดโดยข้อกำหนดของความน่าเชื่อถือ ความต่อเนื่อง ช่วงการสื่อสาร มุมระดับความสูงต่ำสุดที่อนุญาตซึ่งสถานีภาคพื้นดินทำงาน และปัจจัยอื่นๆ
ระบบที่มีดาวเทียม geostationary
ระบบสื่อสารผ่านดาวเทียมที่มีดาวเทียม geostationary มักเรียกว่า SISS (ดาวเทียมอยู่กับที่) กำลังแพร่หลายมากขึ้นเรื่อยๆ ใช้สำหรับการสื่อสารทางโทรศัพท์และโทรเลข วิทยุและโทรทัศน์ ยานอวกาศค้างฟ้าประเภทบูรณาการถูกสร้างขึ้นเพื่อจุดประสงค์ด้านอุตุนิยมวิทยา ศึกษาทรัพยากรธรรมชาติของโลก ติดตามที่อยู่อาศัย และปฏิบัติงานอื่น ๆ
ข้อได้เปรียบที่สำคัญที่สุดของดาวเทียม geostationary คือการก่อตัวของโซนการมองเห็นคงที่ขนาดใหญ่สำหรับจุดต่าง ๆ บนโลก, ความครอบคลุมของดินแดนที่กว้างใหญ่, ความเป็นไปได้ในการจัดการสื่อสารในระยะไกลและด้วยจำนวนผู้สื่อข่าวที่มีนัยสำคัญ
ข้อได้เปรียบที่สำคัญของ SSS กับดาวเทียมในวงโคจร geostationary คือเมื่อใช้งาน ข้อกำหนดสำหรับระบบติดตามและการสื่อสารภาคพื้นดินจะลดลง ในขณะที่อุปกรณ์ชี้ตำแหน่งเสาอากาศบนเครื่องบินจะลดความซับซ้อนหรือลดความซับซ้อนลง ด้วยความช่วยเหลือของดาวเทียมสามดวงที่อยู่ในมุม 120 °ซึ่งสัมพันธ์กันจึงเป็นไปได้ที่จะสร้างระบบการสื่อสารระดับโลกนั่นคือระบบที่ครอบคลุมทั้งโลก

ดาวเทียมสื่อสาร geostationary ซึ่งเปรียบเปรยสามารถจินตนาการได้ว่าเป็นหอส่งสัญญาณโทรทัศน์ซึ่งสูงถึง 36,000 กม. โดยหลักการแล้วอนุญาตให้ส่งสัญญาณโดยตรงโดยไม่ต้องใช้ศูนย์โทรทัศน์ในท้องถิ่นโดยตรงไปยังเสาอากาศของสมาชิก ในปัจจุบัน ระดับพลังงานของสัญญาณโทรทัศน์ที่แผ่ออกมาจาก geostationary ยังไม่เพียงพอสำหรับการรับสัญญาณจากเสาอากาศแบบสมาชิกทั่วไป ดังนั้นจึงจำเป็นต้องใช้เสาอากาศพิเศษขนาดเล็กสำหรับใช้งานเป็นกลุ่ม สำหรับการออกอากาศทางวิทยุสามารถรับได้จากเสาอากาศภายนอกที่มีขนาดเล็กมาก
เมื่อพูดถึงข้อได้เปรียบที่ไม่อาจปฏิเสธได้ของ SISZ เราไม่ควรมองข้ามความจริงที่ว่าการปล่อยยานพาหนะเข้าสู่วงโคจรอยู่กับที่นั้นยากกว่าการขึ้นลงต่ำหรือแม้แต่วงรีสูง การส่งมอบน้ำหนักบรรทุก 1 กิโลกรัมไปยังวงโคจรค้างฟ้านั้นแพงกว่ามาก เพื่อให้ SISZ อยู่ที่จุด "ยืน" ที่กำหนดที่ลองจิจูดที่ต้องการ จำเป็นต้องมีการปรับวงโคจรเป็นประจำโดยใช้ไมโครมอเตอร์ และบนดาวเทียม จำเป็นต้องมีการสำรองน้ำมันเชื้อเพลิงเพื่อวัตถุประสงค์เหล่านี้ การควบคุมบนเครื่องบินมีความซับซ้อนมากขึ้น อย่างไรก็ตาม การพัฒนาด้านอวกาศทำให้สามารถพึ่งพาการเอาชนะปัญหาทั้งหมดที่เกิดขึ้นในการสร้างและการทำงานของระบบสื่อสารผ่านดาวเทียมในพื้นที่พิภพได้อย่างรวดเร็วและประสบความสำเร็จ
ดาวเทียมแพร่ภาพดาวเทียมและดาวเทียมแพร่ภาพทางโทรทัศน์ของสหภาพโซเวียตเช่น "Raduga", "Ekran", "Gorizont" ประสบความสำเร็จในการดำเนินงาน
ดาวเทียมสื่อสารต่างประเทศ เช่น Intelsat, Domsat (USA), Telesat (แคนาดา) และอื่นๆ กำลังทำงานอยู่
แม้จะมีข้อดีของมัน แต่ geostationaries ก็ไม่ได้เปรียบเสมอไปจากมุมมองทางเทคนิคและเศรษฐกิจ ภายใต้เงื่อนไขบางประการ มีเหตุผลมากกว่าที่จะใช้ดาวเทียมในวงโคจรวงรีสูง เช่น ประเภท "โมลนิยา"
VI ... บทสรุป
ความสามารถในการรับส่งข้อมูล การแตกแขนงของระบบ ความน่าเชื่อถือ และประสิทธิภาพของ CCS กำลังเติบโตอย่างต่อเนื่อง ภูมิภาคใหม่ทั้งหมด รวมถึงมุมที่ห่างไกลที่สุดของรัสเซีย ค่อยๆ ครอบคลุมโดยรายการโทรทัศน์หลายรายการ ความสำคัญของ CCS ในการจัดการภาคส่วนต่างๆ ของเศรษฐกิจของประเทศ ในระบบการศึกษามวลชน การแจ้งเตือนปรากฏการณ์ทางธรรมชาติประเภทต่างๆ ดูแลรักษาทางการแพทย์... การสื่อสารผ่านดาวเทียมเคลื่อนที่เป็นที่แพร่หลาย ทำให้สามารถจัดระเบียบการสื่อสารโดยใช้ดาวเทียมได้อย่างรวดเร็วและในทางปฏิบัติในทุกภูมิภาคของประเทศ
ความร่วมมือระหว่างประเทศในการใช้ระบบสื่อสารผ่านดาวเทียมได้ขยายออกไปอย่างมาก ระบบ Intersputnik และ Stationar ได้พัฒนามากยิ่งขึ้น การโต้ตอบกับ Intel-sat, Inmarsat และระบบ CCS อื่น ๆ จากประเทศต่างๆ ทั่วโลกเพิ่มขึ้น
ผู้คนนับล้านมีโอกาสใช้ CCC โดยตรงสำหรับการสื่อสารรายบุคคลกับผู้สมัครสมาชิกรายใดก็ได้ในโลกโดยใช้อุปกรณ์ส่งและรับขนาดเล็กมาก (โทรศัพท์มือถือ) แอปพลิเคชั่น CCC ที่สมจริงสำหรับ "อีเมล" (อินเทอร์เน็ต) นอกจากนี้ยังสามารถใช้ดาวเทียมเพื่อระบุตำแหน่งของพวกมันได้ทุกที่ในโลก สันนิษฐานว่าผู้ใช้จะมีอุปกรณ์นำทางส่วนบุคคลขนาดเล็กและราคาถูกเช่นทรานซิสเตอร์ขนาดเล็ก
ทุกปีระบบสื่อสารผ่านดาวเทียมจะกลายเป็นส่วนสำคัญของ Unified Communication System องค์ประกอบที่สำคัญระบบสื่อสารทั่วโลก พวกเขายังคงมีบทบาทสำคัญในการปรับปรุงการสื่อสารและความเข้าใจร่วมกันระหว่างประเทศ และเมื่อเวลาผ่านไปบทบาทนี้จะเพิ่มมากขึ้น
บรรณานุกรม:
1. Academy of Sciences ของสำนักพิมพ์ "Cosmos-Earth" ของสหภาพโซเวียต "วิทยาศาสตร์" มอสโก 2524
2. สารานุกรมเด็ก เล่ม 2 ก. "สถาบันการศึกษาวิทยาศาสตร์การสอนของ RSFSR" มอสโก 2505
3. Talyzin N.V. "ดาวเทียมสื่อสาร - โลกและจักรวาล", 1977
ค้นหาข้อความแบบเต็ม:
หน้าแรก> บทคัดย่อ> ดาราศาสตร์
หน่วยงานสื่อสารกลาง
สถาบันการศึกษาของรัฐ
มหาวิทยาลัยแห่งรัฐไซบีเรีย
โทรคมนาคมและสารสนเทศ "
ภาควิชาวิทยุกระจายเสียงและโทรทัศน์
เรียงความ
เรื่องพื้นฐานโทรคมนาคม
หัวข้อ: "วิทยุสื่อสารผ่านดาวเทียม".
สำเร็จแล้ว: นักศึกษาชั้นปีที่ 1
Leonov N.I.
ตรวจสอบโดย: จี.พี. กะทูนิน
โนโวซีบีสค์-2009
1. ดาวเทียมโลกประดิษฐ์เป็นตัวทำซ้ำสำหรับระบบ
การเชื่อมต่อ ………………………………………………………………. …………. ………… .3
2. หลักการก่อสร้างและคุณสมบัติของ CCS …………………………………… .7
3. แนวโน้มเทคโนโลยี ……………………………………………… .. ……… 11
4. สถานีอวกาศ …………………………………………………………………… 12
5. สถานีภาคพื้นดิน ……………………………………………………………… .16
1. ดาวเทียมโลกประดิษฐ์เป็นตัวทำซ้ำสำหรับระบบสื่อสาร
การเพิ่มช่วงและความสามารถของระบบสื่อสารเป็นปัญหาพื้นฐานในศิลปวิทยาการเสมอมา น่าเสียดายที่คุณสมบัติที่เกี่ยวข้องตามกฎกลายเป็นทางเลือก: มาตรการเพื่อเพิ่มความจุนำไปสู่การลดช่วงและในทางกลับกัน โดยเฉพาะอย่างยิ่ง การเพิ่มแบนด์วิดธ์จำเป็นต้องเปลี่ยนไปเป็นช่วงคลื่นความถี่ที่สูงกว่าที่เคย สัญญาณนั้นสามารถส่งได้โดยตรงในทางปฏิบัติเฉพาะในระยะทางแนวสายตาเท่านั้น
ความสำเร็จในการพัฒนาด้านอวกาศทำให้สามารถใช้ดาวเทียมเป็นตัวทำซ้ำได้ เนื่องจากพวกมันสามารถตั้งอยู่สูงเหนือพื้นโลกได้ตามอำเภอใจ พื้นที่ให้บริการของพวกมันจึงไม่เพียงแต่ครอบคลุมเฉพาะประเทศหรือทะเลเท่านั้น แต่ยังครอบคลุมทั่วทั้งทวีปและมหาสมุทรด้วย ในกรณีทั่วไป ดาวเทียมจะเคลื่อนที่เป็นวงรี ซึ่งเป็นจุดโฟกัสจุดใดจุดหนึ่งที่ศูนย์กลางของโลกตั้งอยู่ ดาวเทียมเคลื่อนที่สัมพันธ์กับผู้สังเกตการณ์ภาคพื้นดิน และพื้นที่ให้บริการเคลื่อนที่ไปตามพื้นผิวที่มืด ด้วยเหตุนี้ เราจึงควรเพิ่มจำนวนดาวเทียมในระบบ หรือตกลงว่าจะไม่มีการสื่อสารตลอด 24 ชั่วโมง
การปรับปรุงสถานการณ์สามารถทำได้หากเลือกวงโคจรของดาวเทียมเพื่อให้ระยะเวลาของการปฏิวัติดาวเทียมทั่วโลกอยู่ในอัตราส่วนที่เรียบง่ายกับระยะเวลาของการหมุนรอบแกนของมัน (วงโคจรแบบซิงโครนัส) การใช้วงโคจรดังกล่าวนำไปสู่กำหนดการคงที่ของเซสชันการสื่อสารที่เป็นไปได้ เนื่องจากสำหรับผู้สังเกตการณ์ภาคพื้นดิน ดาวเทียมถ่ายทอด (SR) จะปรากฏขึ้นที่จุดที่กำหนดในทรงกลมท้องฟ้าเป็นระยะ ๆ ตลอดเวลาในเวลาเดียวกัน
การทำให้ระบบสื่อสารผ่านดาวเทียมง่ายขึ้นหาก:
วงโคจรของดาวเทียมเป็นวงกลมและอยู่ในระนาบเส้นศูนย์สูตร
คาบการโคจรของดาวเทียมคือหนึ่งวันพอดี โดยทั่วไปแล้วดาวเทียมดังกล่าวจะยังคงอยู่กับที่เมื่อเทียบกับผู้สังเกตการณ์ภาคพื้นดิน วงโคจรที่สอดคล้องกันเรียกว่า ค้างฟ้า(GSO) และดาวเทียมเคลื่อนที่ไปตามนั้น - เครื่องเขียน. GSO มีรัศมีประมาณ 42.3 พันกม. เป็นเอกลักษณ์และมีเพียงแห่งเดียวดังนั้นการจัดวางดาวเทียมบนนั้นจึงถูกควบคุมโดยองค์กรระหว่างประเทศที่นำโดยผู้อุปถัมภ์ของสหประชาชาติในปัจจุบันคือสหภาพโทรคมนาคมระหว่างประเทศ (ITU) องค์กรเดียวกันได้รับความไว้วางใจให้ประสานงานระหว่างประเทศของระบบสื่อสารผ่านดาวเทียมอื่น ๆ เพื่อจำกัดอิทธิพลซึ่งกันและกันระหว่างกันอย่างมีเหตุผล
แม้ว่าในปัจจุบัน SR ที่ใช้อย่างล้นหลามจะอยู่นิ่งและไม่ได้ไร้ข้อบกพร่องที่มีนัยสำคัญ ดาวเทียมเหล่านี้เหมาะที่สุดสำหรับการให้บริการในเขตร้อนและกึ่งเขตร้อน เมื่อผู้สังเกตเคลื่อนตัวบนพื้นผิวโลกจากจุดดาวเทียมย่อยตามเส้นเมอริเดียนไปยังขั้วของโลก มุมสูงของทิศทางไปยังยานอวกาศที่หยุดนิ่ง (SC) จะลดลง แตะระดับศูนย์สำหรับละติจูดที่ 82 (เหนือหรือใต้) สำหรับจุดเส้นเมริเดียนย่อยของดาวเทียมที่ใกล้กับเสามากขึ้น ทัศนวิสัยของดาวเทียมโดยทั่วไปจะไม่ปรากฏ เข้าใจได้ง่ายว่าขอบเขตการมองเห็นทางเรขาคณิตของยานอวกาศที่หยุดนิ่ง เมื่อผู้สังเกตเบี่ยงเบนจากเส้นเมริเดียนย่อยของดาวเทียมลงมาทางเส้นศูนย์สูตร นอกจากนี้ การทำงานของสายวิทยุในทิศทางที่มีมุมสูงมักจะทำได้ยาก ทั้งเนื่องจากการรับสัญญาณที่สะท้อนจากพื้นโลก และจากผลของการป้องกันจากระดับความสูงต่างๆ ป่าไม้ อาคาร หรือสิ่งกีดขวางอื่นๆ ดังนั้นยานอวกาศที่อยู่นิ่งจึงไม่สามารถให้บริการในพื้นที่ที่อยู่ทางเหนือของวงกลมขั้วโลกเหนือและใต้ได้ ในขณะเดียวกัน ดินแดนเหล่านี้มักเป็นที่สนใจอย่างมาก ตัวอย่างเช่น สำหรับรัสเซีย แม้แต่อาณาเขตของขั้วโลกเหนือก็มีความสนใจอย่างมาก สาเหตุหลักมาจากความจริงที่ว่าเส้นทางที่ทำกำไรได้มากที่สุดของสายการบินที่สำคัญที่สุดจำนวนหนึ่งวิ่งผ่าน
สามารถเลือกวงโคจร SR เพื่อให้บริการพิเศษกับบางภูมิภาคบนพื้นผิวโลก ดังนั้น รัสเซียจึงได้รับวงโคจรเป็นวงรีซึ่งได้รับการดัดแปลงเป็นพิเศษสำหรับการให้บริการ ภาคเหนือโลกของเรา. จุดสุดยอดของวงโคจรนี้ตั้งอยู่เหนือซีกโลกเหนือ ห่างจากพื้นผิวโลกประมาณ 40,000 กม. และเส้นรอบวงนั้นอยู่ที่ระดับความสูงหลายร้อยกิโลเมตรเหนือซีกโลกใต้ ระนาบการโคจรเอียงไปที่เส้นศูนย์สูตรประมาณ 65 ° คาบการโคจรของดาวเทียมในวงโคจรนี้คือครึ่งวัน จึงเป็นดาวเทียมแบบซิงโครนัส ในหนึ่งวันเขาทำสองลูป "อันแรกเรียกว่า หลัก,ถึงจุดสุดยอดเหนือไซบีเรีย ( ณ จุดที่มีพิกัดทางภูมิศาสตร์ 63 "5 ° N และ 81 ° E) และที่สอง - คอนจูเกต - ที่จุดที่มีละติจูดเดียวกัน แต่เปลี่ยนลองจิจูด 180 °เช่น ... 99 ° ว (เหนือแคนาดา). พารามิเตอร์ของวงโคจรนี้ถูกเลือกเพื่อให้ & ของส่วนหนึ่งของวงโคจรที่อยู่ติดกับจุดสุดยอด ความเร็วของการเคลื่อนที่เชิงมุมของดาวเทียมในทิศทาง "ตะวันออก-ตะวันตก" เกิดขึ้นพร้อมกับโลก เงื่อนไขนี้จะเกิดขึ้นจริงโดยประมาณทั่วทั้งส่วนการทำงานทั้งหมดของวงโคจร (ตั้งแต่สามถึงสี่ชั่วโมงก่อนจะถึงจุดสุดยอดถึงสามถึงสี่ชั่วโมงหลังจากผ่านไป) และทำให้แน่ใจว่าดาวเทียมจะไม่เคลื่อนที่สัมพันธ์กับผู้สังเกตใดๆ บนโลกทางทิศตะวันออก - ทิศตะวันตก
ในส่วนการทำงานของวงโคจร การกระจัดในทิศทาง "เหนือ-ใต้" ก็ค่อนข้างเล็กเช่นกัน วงโคจรรูปวงรีให้บริการแก่ซีกโลกเหนือของโลก รวมถึงบริเวณขั้วโลกเหนือที่มีมุมสูงพอสมควร ข้อเสียคือต้องใช้ระบบดาวเทียมสามหรือสี่ดวงเพื่อรักษาความต่อเนื่องของการสื่อสารในระหว่างวัน ซึ่งจะทำให้ต้นทุนของส่วนพื้นที่ของระบบเพิ่มขึ้น เป็นสิ่งสำคัญเช่นกันที่เมื่อใช้ดาวเทียมรูปไข่ที่ ES จำเป็นต้องจัดเตรียมการติดตามการเคลื่อนไหวของยานอวกาศด้วยเสาอากาศซึ่งจะเป็นการเพิ่มต้นทุนของระบบที่ซับซ้อนบนบก
ดาวเทียมทวนสัญญาณ (SR) จะต้องรับสัญญาณจากสถานีภาคพื้นดิน (ES) ของระบบสื่อสาร ขยายสัญญาณและส่งสัญญาณอีกครั้งไปยัง ES ที่ต้องการใช้ดวงตา ดังนั้น CP จึงประกอบด้วยอุปกรณ์รับและส่งสัญญาณสำหรับการถ่ายทอดสัญญาณ
เนื่องจากอัตราขยายจากต้นทางถึงปลายทางของเส้นทางของตัวรับส่งสัญญาณ SR ต้องมีขนาดใหญ่เพียงพอ จึงจำเป็นต้องรับและส่งที่ความถี่ต่างกัน (ไม่เช่นนั้นจะไม่สามารถหลีกเลี่ยงเส้นทางที่กระตุ้นตัวเองได้) ดังนั้นตัวแปลงความถี่จึงเป็นองค์ประกอบที่ขาดไม่ได้ของเส้นทางการส่งสัญญาณซ้ำ
ลักษณะเฉพาะของผู้ทำซ้ำบริการกระจายเสียงคือสำหรับพวกเขาเส้นทางหลักคือเส้นทางส่งสัญญาณซึ่งจะดำเนินการแขวนจริง อุปกรณ์รับยังติดตั้งอยู่บนระบบกระจายเสียง ซึ่งใช้สำหรับรับรายการออกอากาศที่จัดมาให้บนเครื่อง ลิงก์วิทยุออนบอร์ดเรียกว่า ตัวป้อน
ดาวเทียมรีเลย์ เช่นเดียวกับยานอวกาศที่ใช้งานอยู่ ยกเว้นเส้นทางรีเลย์เอง ที่อ้างอิงถึงอุปกรณ์นี้ น้ำหนักบรรทุก(PN) ยังประกอบด้วยระบบเสริมจำนวนหนึ่ง เช่น ระบบจ่ายไฟ ระบบการวางแนวและการรักษาเสถียรภาพ ระบบควบคุมความร้อนและระบบควบคุม หลังรวมถึงระบบสำหรับการสร้างและส่งข้อมูลทางไกล ยานอวกาศลบน้ำหนักบรรทุกเรียกว่า แพลตฟอร์มอวกาศ(เคพี). แพลตฟอร์มดังกล่าวสามารถใช้ร่วมกับยานพาหนะการบินต่างๆ เพื่อสร้างยานอวกาศที่แตกต่างกันจำนวนหนึ่ง
ปัจจุบัน SRs แบบอยู่กับที่มักใช้เพื่อประโยชน์ของบริการคงที่และกระจายเสียง พารามิเตอร์ทั่วไปของแพลตฟอร์มดาวเทียมดังกล่าว:
อัตราส่วนกำลังต่อน้ำหนักสูงสุด 5-7 kW และ 1.5-2 kW ถูกจัดสรรเพื่อจ่ายพลังงานให้กับน้ำหนักบรรทุก
น้ำหนักคำสั่ง 2-3 ตันรวมน้ำหนักบรรทุก 0.5-0.8 กรัม
การวางแนวและความแม่นยำในการรักษาเสถียรภาพของคำสั่ง 0.1;
ระยะเวลาของการดำรงอยู่คือ 12-15 ปี
นอกจากยานอวกาศมาตรฐานแล้ว ปัจจุบันถือว่าใช้ยานอวกาศขนาดเล็ก (SSC) เพื่อประโยชน์ในการบริการประจำที่ด้วยมวล 500-800 กก. (รวม PS ที่ 100-200 กก.) และอัตราส่วนกำลังต่อน้ำหนัก ขนาด 1.8-2.5 กิโลวัตต์ ข้อดีของยานอวกาศขนาดเล็กคือความเป็นไปได้ของการเปิดตัวแบบกลุ่มหรือตาม (ร่วมกับยานอวกาศมาตรฐาน) ซึ่งช่วยลดต้นทุนในการเปิดตัวได้อย่างมาก สามารถเปิดตัว SSC ได้ที่จุดที่มี SR อื่นอยู่แล้วและให้การเพิ่มถังปฏิบัติการที่จำเป็นหรือเปลี่ยนถังที่ไม่ได้สั่ง พวกเขายังสามารถใช้เพื่อสร้างระบบสื่อสารผ่านดาวเทียมระดับชาติของประเทศที่ค่อนข้างเล็กหรือยากจน
ขึ้นอยู่กับองค์ประกอบของผู้ใช้ SRs แบ่งออกเป็นระดับสากลและระดับชาติ SRs ระหว่างประเทศที่มีชื่อเสียงที่สุดของบริการคงที่คือ Intelsat และ Eutelsat บริษัท Intersputnik ระหว่างประเทศก็เป็นเจ้าของทรัพยากรที่สำคัญเช่นกัน SR Eutelsat ยังมีลำต้นที่ประเทศในยุโรปใช้บ่อยที่สุดสำหรับการออกอากาศทางโทรทัศน์ ระบบดาวเทียม Astra ใช้เพื่อวัตถุประสงค์เหล่านี้โดยเฉพาะ
ระบบประจำชาติของบริการคงที่ผ่านดาวเทียมของรัสเซียปัจจุบันใช้ SR ประเภท Express รวมถึง Yamal ของการดัดแปลงต่างๆ
2. หลักการสร้างและคุณสมบัติของ CCC
ประเภทวงโคจร ดาวเทียมสื่อสารสามารถอยู่ในวงโคจรเป็นวงกลมหรือวงรี ดังนั้นศูนย์กลางของโลกจึงเกิดขึ้นพร้อมกับศูนย์กลางของวงโคจรเป็นวงกลมหรือกับจุดโฟกัสหนึ่งของวงโคจรวงรี (รูปที่ 1)
ฉีด ผม ระหว่างระนาบของวงโคจรกับระนาบของเส้นศูนย์สูตรเรียกว่าความเอียง ที่ ผม=0 วงโคจรเรียกว่าเส้นศูนย์สูตรเมื่อ ผม= 90 ° - ขั้วส่วนที่เหลือ - เฉียง วงโคจรเป็นวงกลมมีความเอียงและความสูง H 3 เหนือพื้นผิวโลกต่างกัน วงรีวงรี - โดยความเอียงและความสูงของจุดสุดยอด A และเส้นรอบวง P เหนือพื้นผิวโลก เส้นที่เชื่อมระหว่าง apogee และ perigee เรียกว่า apse line สนามโน้มถ่วงของดวงจันทร์ ดวงอาทิตย์ ดาวเคราะห์ สนามแม่เหล็กโลก ความไม่มีทรงกลมของโลก และปัจจัยรบกวนอื่นๆ ทำให้เกิดการเปลี่ยนแปลงในพารามิเตอร์ของวงโคจรเมื่อเวลาผ่านไป สำหรับวงโคจรวงรีเอียง การเปลี่ยนแปลงเหล่านี้จะน้อยมากหากเราเลือก ผม= 63.4 °
พบวงโคจรสองประเภทใน SSS: ประเภทวงรีสูง "Molniya" และวงโคจร geostationary คนแรกได้ชื่อมาจากดาวเทียมสื่อสารของสหภาพโซเวียต "Molniya" พารามิเตอร์: ความสูงสูงสุดประมาณ 40,000 กม., ความสูงประมาณ 500 กม., i≈63.4 ° จุดสุดยอดของวงโคจรอยู่เหนือซีกโลกเหนือ ระยะเวลาโคจรของดาวเทียมคือ 12 ชั่วโมง ดาวเทียมทำสองรอบต่อวัน ดังนั้นทุกวันจึงมองเห็นได้ในภูมิภาคเดียวกันของโลกในเวลาเดียวกัน วงโคจรที่คาบการโคจรของดาวเทียมเป็นพหุคูณของวันโลกเรียกว่า subsynchronous ตามกฎข้อที่สองของเคปเลอร์ ในบริเวณจุดสูงสุดของวงโคจรวงรีสูง ดาวเทียมจะเคลื่อนที่ช้ากว่าที่จุดเพอริจีมาก เซสชั่นการสื่อสารจะดำเนินการเมื่อดาวเทียมเคลื่อนที่ไปตามส่วนของวงโคจรที่อยู่ติดกับจุดสุดยอด มันสามารถอยู่ได้ประมาณ 8 ชั่วโมง เนื่องจากในช่วงเวลานี้ ดาวเทียมในวงโคจรประเภท Molniya นั้นมองเห็นได้ทั่วสหภาพโซเวียต การวางดาวเทียมสามดวงในวงโคจรทำให้สามารถสื่อสารได้ตลอดเวลา ดาวเทียมเหล่านี้เคลื่อนที่สัมพันธ์กับ ES ดังนั้นในระยะหลังจึงจำเป็นต้องติดตั้งเสาอากาศเคลื่อนที่ที่ติดตามดาวเทียม
วงโคจรค้างฟ้า(GO) เป็นวงโคจรวงกลมเส้นศูนย์สูตรซึ่ง H 3 = 35786 กม. ดาวเทียมที่เคลื่อนที่ในวงโคจรนี้เรียกว่า ค้างอยู่มันหมุนด้วยความเร็วเชิงมุมเท่ากับโลก ดังนั้นผู้สังเกตการณ์บนโลกจึงดูเหมือนไม่มีการเคลื่อนไหว จุดบนพื้นผิวโลกซึ่งอยู่เหนือดาวเทียมถึงจุดสุดยอด เรียกว่า ดาวเทียมย่อย สำหรับดาวเทียมค้างฟ้า วิถีโคจรของจุดดาวเทียมย่อยจะเสื่อมลงเป็นจุดบนเส้นศูนย์สูตร เส้นแวงของจุดนี้กำหนดตำแหน่งของดาวเทียมค้างฟ้า การสื่อสารผ่านดาวเทียมดังกล่าวสามารถรักษาได้โดยใช้เสาอากาศคงที่ของ ES ในความเป็นจริง บ่อยครั้งจำเป็นต้องคำนึงถึงความผันผวนที่ค่อนข้างเล็กในตำแหน่งของดาวเทียมที่เกิดจากปัจจัยรบกวนข้างต้น ภายใต้อิทธิพลของมัน จุดย่อยของดาวเทียมเริ่มสั่นด้วยความถี่รายวัน หลังจากนั้นไม่นาน วิถีการเคลื่อนที่ของจุดดาวเทียมย่อยในหนึ่งวันจะอยู่ในรูปของ "รูปที่แปด" ซึ่งทอดยาวไปในแนวเหนือ-ใต้ โดยมีจุดศูนย์กลางอยู่ที่เส้นศูนย์สูตร ในหนึ่งปี ช่วงของตัวเลขแปดนี้จะอยู่ที่ประมาณ ± 1 ° ด้วยเหตุนี้ จึงจำเป็นต้องแก้ไขตำแหน่งของดาวเทียมในวงโคจรเป็นระยะ
การสื่อสารผ่านดาวเทียม ……………………………………………… ..4 1.1 ประวัติ ดาวเทียมการสื่อสาร ……………………………………………… .4 1.2 องค์กร ดาวเทียมลำต้น ………………………………………… ..5 ... ประชุมผู้บริหาร on วิทยุสื่อสาร(WARC-92), ...
ดาวเทียมโลกประดิษฐ์ (AES) - อวกาศ อากาศยานที่โคจรรอบโลกในวงโคจรแบบ geocentric ในการโคจรรอบโลก อุปกรณ์ต้องมีความเร็วเริ่มต้นเท่ากับหรือมากกว่าความเร็วจักรวาลแรก เที่ยวบิน AES ดำเนินการที่ระดับความสูงหลายแสนกิโลเมตร ขีดจำกัดล่างของระดับความสูงของเที่ยวบิน AES ถูกกำหนดโดยความจำเป็นในการหลีกเลี่ยงกระบวนการลดความเร็วอย่างรวดเร็วในชั้นบรรยากาศ คาบการโคจรของดาวเทียม ขึ้นอยู่กับระดับความสูงของเที่ยวบินโดยเฉลี่ย สามารถอยู่ในช่วงตั้งแต่หนึ่งชั่วโมงครึ่งจนถึงหลายปี ดาวเทียมที่มีความสำคัญเป็นพิเศษในวงโคจรค้างฟ้าซึ่งมีคาบการโคจรเท่ากับวันอย่างเคร่งครัด ดังนั้นสำหรับผู้สังเกตการณ์ภาคพื้นดิน ดาวเทียมเหล่านี้จึง "แขวน" โดยไม่เคลื่อนไหวบนท้องฟ้า ซึ่งทำให้สามารถกำจัดอุปกรณ์โรตารี่ในเสาอากาศได้
ตามข้อตกลงระหว่างประเทศ ยานอวกาศจะเรียกว่าดาวเทียม หากยานอวกาศได้ทำการปฏิวัติรอบโลกอย่างน้อยหนึ่งครั้ง มิเช่นนั้นจะถือเป็นโพรบขีปนาวุธที่วัดตามแนววิถีขีปนาวุธและไม่ได้ลงทะเบียนเป็นดาวเทียม ขึ้นอยู่กับงานที่แก้ไขด้วยความช่วยเหลือของดาวเทียม พวกมันจะถูกแบ่งออกเป็นงานวิจัยทางวิทยาศาสตร์และงานประยุกต์ หากดาวเทียมติดตั้งเครื่องส่งสัญญาณวิทยุ อุปกรณ์วัดอย่างใดอย่างหนึ่งหรืออย่างอื่น ไฟแฟลชสำหรับส่งสัญญาณแสง ฯลฯ จะเรียกว่าใช้งานอยู่ ดาวเทียมแบบพาสซีฟมักจะมีไว้สำหรับการสังเกตการณ์จากพื้นผิวโลกเมื่อแก้ไขปัญหาทางวิทยาศาสตร์บางอย่าง (ดาวเทียมดังกล่าวรวมถึงดาวเทียมบอลลูนซึ่งมีเส้นผ่านศูนย์กลางหลายสิบเมตร) ดาวเทียมวิจัยใช้ในการสำรวจโลก เทห์ฟากฟ้า อวกาศ เหล่านี้รวมถึงโดยเฉพาะอย่างยิ่งดาวเทียมธรณีฟิสิกส์ (ดูดาวเทียมธรณีฟิสิกส์) ดาวเทียม geodetic หอดูดาวดาราศาสตร์ที่โคจรรอบ ฯลฯ ดาวเทียมประยุกต์ ได้แก่ ดาวเทียมสื่อสาร ดาวเทียมอุตุนิยมวิทยา (ดู ดาวเทียมอุตุนิยมวิทยา) ดาวเทียมเพื่อการศึกษาทรัพยากรโลก ดาวเทียมนำทาง ( ดูการนำทาง ดาวเทียม) ดาวเทียมเพื่อวัตถุประสงค์ทางเทคนิค (เพื่อศึกษาผลกระทบของสภาพพื้นที่ต่อวัสดุ สำหรับการทดสอบและการทำงานของระบบออนบอร์ด) และดาวเทียมอื่น ๆ ที่มีไว้สำหรับการบินของมนุษย์เรียกว่าเรือดาวเทียมบรรจุคน AES ในวงโคจรเส้นศูนย์สูตรที่วางอยู่ใกล้ระนาบของเส้นศูนย์สูตรเรียกว่าเส้นศูนย์สูตร ดาวเทียมในวงโคจรขั้ว (หรือ circumpolar) ที่โคจรใกล้ขั้วโลกเรียกว่าขั้ว AES ถูกปล่อยเข้าสู่วงโคจรเส้นศูนย์สูตรทรงกลม ซึ่งอยู่ห่างจากพื้นผิวโลก 35860 กม. และเคลื่อนที่ไปในทิศทางที่สอดคล้องกับทิศทางการหมุนของโลก "แขวน" โดยไม่เคลื่อนไหวเหนือจุดหนึ่งของพื้นผิวโลก ดาวเทียมดังกล่าวเรียกว่านิ่ง
ดาวเทียมดวงแรก "สปุตนิก"
เปิดตัวภายใต้โครงการ IGY (ปีธรณีฟิสิกส์สากล) ในช่วงกิจกรรมสุริยะสูงสุด (2500-2501) มวลของดาวเทียมคือ 83.6 กก. ตัวเรือน - เส้นผ่านศูนย์กลางทรงกลม 0.58 ม. อายุการใช้งาน 92 วัน
ดาวเทียมดวงแรกที่มีสัตว์ ("สปุตนิก-2" กับสุนัขไลก้า)
ดาวเทียมไม่ได้ถูกแยกออกจากกันและเป็นตัวแทนของขั้นตอนที่สองทั้งหมด - บล็อกกลางของจรวด น้ำหนักบรรทุก 503.8 กก. วันที่เปิดตัว 11/03/1957
ดาวเทียมสื่อสารดวงแรก - ทวนสัญญาณที่ใช้งานอยู่ ("Atlas-Speed")
ภาษาอังกฤษ Atlas-Score, Atlas จากยานยิงและ SCORE จาก Signal Communications Orbit Relay Experiment - การทดลองเพื่อถ่ายทอดสัญญาณการสื่อสารจากวงโคจร วันที่เปิดตัว 12/18/1958
ดาวเทียมอุตุนิยมวิทยาดวงแรก "TIROS-1"
("TIROS" ย่อมาจาก Television Infra-Red Observation Satellite เป็นดาวเทียมสังเกตการณ์ที่มีโทรทัศน์และอุปกรณ์อินฟราเรดสำหรับรับภาพเมฆปกคลุมและวัดการแผ่รังสีความร้อนของโลก) น้ำหนัก 120 กก. ตัวเรือน - ปริซึม 18 ด้าน (สูง 0.5 ม. ความกว้างด้านข้างสูงสุด ~ 1 ม.) วันที่เปิดตัว 04/01/1960
เครื่องบินลาดตระเวนดาวเทียมโซเวียตลำแรก (Zenit-2)
ชื่อทางการคือ "คอสมอส-4" สร้างขึ้นบนพื้นฐานของสถานีคอมเพรสเซอร์ Vostok 2K มีแคปซูลโคตรสำหรับการส่งคืนอุปกรณ์วิทยาศาสตร์และฟิล์มภาพถ่ายสู่โลก วันที่เปิดตัว 04/26/1962
20. สถานีอวกาศอัตโนมัติ: เป้าหมายและวัตถุประสงค์ของการใช้งาน, ตัวอย่างของการนำไปปฏิบัติ
สถานีอวกาศอัตโนมัติ (AMS) เป็นยานอวกาศไร้คนขับที่ออกแบบมาสำหรับการบินในอวกาศระหว่างดาวเคราะห์ (ไม่อยู่ในวงโคจร geocentric) โดยใช้งานตามภารกิจที่ได้รับมอบหมายต่างๆ แม้ว่าจะมีหลายสิบประเทศที่มีดาวเทียมใกล้โลก แต่มีเพียงไม่กี่ประเทศเท่านั้นที่เข้าใจเทคโนโลยีที่ซับซ้อนของสถานีอวกาศ - สหภาพโซเวียต / รัสเซีย, สหรัฐอเมริกา, ยุโรป / ESA, ญี่ปุ่น, จีน, อินเดีย ในเวลาเดียวกัน มีเพียงสี่กลุ่มแรกที่ถูกส่งไปยังดาวอังคาร ดาวศุกร์ และดาวหาง ไปยังดาวเคราะห์น้อย - เฉพาะสหรัฐอเมริกา ยุโรป และญี่ปุ่น ไปยังดาวพุธ ดาวยูเรนัส และดาวเนปจูน - เฉพาะสหรัฐอเมริกา ไปยังดาวพฤหัสบดีและดาวเสาร์ - สหรัฐอเมริกา ซึ่ง AMS สองแห่งที่มีส่วนร่วมของ ESA ด้วยค่าใช้จ่ายที่สำคัญและความซับซ้อนสูงของเที่ยวบินระหว่างดาวเคราะห์ โครงการระหว่างประเทศในพื้นที่นี้มีแนวโน้มที่ดี ตัวอย่างเช่น มีการวางแผนโพรบรุ่นใหม่สำหรับการสำรวจระบบดาวพฤหัสบดีโดยมีส่วนร่วมของ NASA, ESA, Roscosmos และ JAXA โดยปกติ บบส. ได้รับการออกแบบเพื่อดำเนินงานต่าง ๆ ตั้งแต่โครงการวิจัยไปจนถึงการสาธิตทางการเมือง วัตถุทั่วไปสำหรับงานวิจัยคือดาวเคราะห์ดวงอื่น บริวารธรรมชาติ ดาวหาง และวัตถุอื่นๆ ระบบสุริยะ... ในกรณีนี้ โดยปกติการถ่ายภาพ การสแกนบรรเทาทุกข์ พารามิเตอร์ปัจจุบันของสนามแม่เหล็กการแผ่รังสีอุณหภูมิ องค์ประกอบทางเคมีบรรยากาศของดาวเคราะห์ดวงอื่น ดิน และอวกาศใกล้โลก มีการตรวจสอบลักษณะคลื่นไหวสะเทือนของดาวเคราะห์ การวัดที่สะสมจะถูกส่งไปยังพื้นโลกเป็นระยะโดยใช้การสื่อสารทางวิทยุ AMC ส่วนใหญ่มีการสื่อสารทางวิทยุแบบสองทิศทางกับโลก ซึ่งทำให้สามารถใช้เป็นอุปกรณ์ควบคุมจากระยะไกลได้ วี ช่วงเวลานี้ความถี่ในช่วงวิทยุใช้เป็นช่องสัญญาณสำหรับการส่งข้อมูล อนาคตของการใช้เลเซอร์ในการสื่อสารระหว่างดาวเคราะห์กำลังอยู่ในระหว่างการตรวจสอบ ระยะทางไกลทำให้เกิดความล่าช้าอย่างมากในการแลกเปลี่ยนข้อมูล ดังนั้นจึงต้องการเพิ่มระดับของระบบอัตโนมัติของ AMC
ดาวเทียมเทียมดวงแรกของดวงจันทร์ (ISL "Luna-10")
เวลาดำรงอยู่ 56 วัน เสร็จสิ้น 460 รอบรอบดวงจันทร์ เปิดตัวเมื่อ 03/31/1966 โคจรรอบดวงจันทร์เมื่อวันที่ 04/03/1966
ดาวเทียมประดิษฐ์ดวงแรกของ Mars ISM ("Mariner-9")
มวลของยานอวกาศคือ 998 กก. รวม 450 กก. KTDU, แรงขับ 1.3 kN. ถ่ายโอนภาพดาวอังคาร 7329 ภาพ (ความละเอียดสูงสุด 0.1 ม.) ดาวเทียม Deimos และ Phobos บนพื้นฐานของภาพ แผนที่ของดาวเคราะห์ถูกรวบรวม และเลือกพื้นที่ลงจอดของโมดูลการลงจอดของยานอวกาศ Viking-1 และ Viking-2 ซึ่งลงจอดบนดาวอังคารเมื่อวันที่ 20.07 และ 04.09. พ.ศ. 2519 ที่ระยะทาง 6400 กม. จากกัน เปิดตัวเมื่อ 05/30/1971; สรุปโคจรรอบดาวอังคาร 14/11/1971
โซเวียตคนแรก ดาวเทียมประดิษฐ์ Mars ISM ("Mars-2", "Mars-3")
มวลยานอวกาศลำละ 4650 กก. มีช่องโคจรและยานลง หลังจากการแยกตัวออกจากกัน ISM เบรกในชั้นบรรยากาศ ยานอวกาศร่อนลงมาและร่อนลงบนพื้นผิวดาวอังคารอย่างนุ่มนวล ทำหน้าที่เป็นตัวทำซ้ำสำหรับการส่งข้อมูลจากยานอวกาศไปยังโลก ISM มีอุปกรณ์ทางวิทยาศาสตร์และกล้องโทรทัศน์ภาพสองตัวที่มีทางยาวโฟกัสต่างกันสำหรับการถ่ายภาพพื้นผิวดาวอังคาร เปิดตัวเมื่อ 05/19/1971; เข้าสู่วงโคจรรอบดาวอังคารในวันที่ 27 พฤศจิกายน และ 2 ธันวาคม พ.ศ. 2514
ดาวเทียมประดิษฐ์ดวงแรกของ Venus ISV (Venera-9, Venera-10)
เปิดตัวเมื่อ 08.06 และ 14.06.1975; ปล่อยโคจรรอบดาวศุกร์ในวันที่ 22.10 และ 25.10.1975
ดาวเทียมประดิษฐ์ดวงแรกของดาวเสาร์ AMS Cassini
งบประมาณโครงการมากกว่า 3 พันล้านดอลลาร์ ด้วยความช่วยเหลือของอุปกรณ์นี้ทำให้ค้นพบดาวเทียมดวงใหม่จำนวนมากของดาวเสาร์ได้รับภาพถ่ายที่เป็นเอกลักษณ์ของดาวเคราะห์และดาวเทียมของมัน มวลของ Cassini เมื่อเริ่มต้นคือ 5710 กก. รวมถึง Huygens 320 กก. เครื่องมือวิทยาศาสตร์ 336 กก. และเชื้อเพลิง 3130 กก. สถานีสูง 6.7 ม. กว้าง 4 ม. วันที่เปิดตัว 10/15/1997 โคจรรอบดาวเสาร์ 06/30/2004 ดาวเทียมเทียมดวงแรกของดาวพุธ "เมสเซนเจอร์" ที่แปลว่า "เมสเซนเจอร์" - ตัวย่อของพื้นผิวเมอร์คิวรี สิ่งแวดล้อมอวกาศ จีโอเคมี และเรนเจอร์ มวลที่ปล่อยของ AMC MESSENGER คือ ประมาณ 1100 กก. โดยมีเกือบ 600 กก. (มากกว่าครึ่งหนึ่งของมวลรวม) - เชื้อเพลิง ตัวเครื่องทำจากวัสดุกราไฟท์ผสมและมีขนาด 1.42 × 1.85 × 1.27 ม. กำลัง 450 กิโลวัตต์ วันที่เปิดตัว 03/17/2011 วงโคจรเปิดตัว 03/18/2011
x
x
(เออีเอส)
ยานอวกาศเปิดตัวสู่วงโคจรรอบโลกและออกแบบมาเพื่อแก้ปัญหาทางวิทยาศาสตร์และประยุกต์ การเปิดตัวดาวเทียมดวงแรกซึ่งกลายเป็นเทห์ฟากฟ้าเทียมดวงแรกที่มนุษย์สร้างขึ้นได้ดำเนินการในสหภาพโซเวียตเมื่อวันที่ 4 ตุลาคม 2500 และเป็นผลมาจากความก้าวหน้าในเทคโนโลยีจรวด อิเล็กทรอนิกส์ การควบคุมอัตโนมัติ เทคโนโลยีคอมพิวเตอร์ กลศาสตร์ท้องฟ้า และสาขาวิทยาศาสตร์และเทคโนโลยีอื่นๆ ด้วยความช่วยเหลือของดาวเทียมดวงนี้ ความหนาแน่นของบรรยากาศชั้นบนถูกวัดเป็นครั้งแรก (จากการเปลี่ยนแปลงในวงโคจรของมัน) ได้มีการตรวจสอบคุณสมบัติของการแพร่กระจายของสัญญาณวิทยุในบรรยากาศรอบนอก การคำนวณเชิงทฤษฎีและการแก้ปัญหาทางเทคนิคหลักที่เกี่ยวข้องกับ มีการตรวจสอบการปล่อยดาวเทียมเทียมขึ้นสู่วงโคจร เมื่อวันที่ 1 กุมภาพันธ์ พ.ศ. 2501 ดาวเทียม "Explorer-1" ของอเมริกาดวงแรกได้เปิดตัวสู่วงโคจรและอีกไม่นานประเทศอื่น ๆ ก็ได้เปิดตัวดาวเทียมโดยอิสระ: 26 พฤศจิกายน 2508 - ฝรั่งเศส (ดาวเทียม "A-1") พฤศจิกายน 29, 1967 - ออสเตรเลีย ("VRESAT- 1 "), 11 กุมภาพันธ์ 1970 - ญี่ปุ่น (" Osumi "), 24 เมษายน 1970 - จีน (" China-1 "), 28 ตุลาคม 1971 - บริเตนใหญ่ (" Prospero " ). ดาวเทียมบางดวงที่ผลิตในแคนาดา ฝรั่งเศส อิตาลี บริเตนใหญ่ และประเทศอื่น ๆ ได้เปิดตัว (ตั้งแต่ปี 2505) โดยใช้ยานยิงของอเมริกา ในทางปฏิบัติของการวิจัยอวกาศอย่างกว้างขวาง ความร่วมมือระหว่างประเทศ... ดังนั้นภายใต้กรอบความร่วมมือทางวิทยาศาสตร์และทางเทคนิคของประเทศสังคมนิยม จึงได้มีการปล่อยดาวเทียมจำนวนหนึ่ง ดาวเทียมดวงแรก Interkosmos-1 ถูกปล่อยสู่วงโคจรเมื่อวันที่ 14 ตุลาคม พ.ศ. 2512 ภายในปี พ.ศ. 2516 มีการปล่อยดาวเทียมประเภทต่างๆ มากกว่า 1,300 ดวง รวมทั้งโซเวียตประมาณ 600 ดวง อเมริกาและประเทศอื่นๆ อีกกว่า 700 ดวง รวมทั้งยานอวกาศ-ดาวเทียมที่มีคนควบคุม และสถานีโคจรพร้อมลูกเรือ
ข้อมูลทั่วไปเกี่ยวกับดาวเทียมตามข้อตกลงระหว่างประเทศ ยานอวกาศจะเรียกว่าดาวเทียม หากยานอวกาศได้ทำการปฏิวัติรอบโลกอย่างน้อยหนึ่งครั้ง มิเช่นนั้นจะถือเป็นโพรบขีปนาวุธที่วัดตามแนววิถีขีปนาวุธและไม่ได้ลงทะเบียนเป็นดาวเทียม ขึ้นอยู่กับงานที่แก้ไขด้วยความช่วยเหลือของดาวเทียม พวกมันจะถูกแบ่งออกเป็นงานวิจัยทางวิทยาศาสตร์และงานประยุกต์ หากดาวเทียมติดตั้งเครื่องส่งสัญญาณวิทยุ อุปกรณ์วัดอย่างใดอย่างหนึ่งหรืออย่างอื่น ไฟแฟลชสำหรับส่งสัญญาณแสง ฯลฯ จะเรียกว่าใช้งานอยู่ ดาวเทียมแบบพาสซีฟมักจะได้รับการออกแบบสำหรับการสังเกตการณ์จากพื้นผิวโลกในการแก้ปัญหาทางวิทยาศาสตร์บางอย่าง (ดาวเทียมดังกล่าวรวมถึงดาวเทียมบอลลูนถึงหลายสิบดวง ม). ดาวเทียมวิจัยใช้ในการสำรวจโลก เทห์ฟากฟ้า อวกาศ เหล่านี้รวมถึงโดยเฉพาะอย่างยิ่งดาวเทียมธรณีฟิสิกส์ (ดู) หอดูดาวดาราศาสตร์โคจร ฯลฯ ดาวเทียมประยุกต์คือดาวเทียมอุตุนิยมวิทยา (ดู) ดาวเทียมสำหรับการศึกษาทรัพยากรโลก ดาวเทียมนำทาง (ดู) ดาวเทียมเทคนิค ( สำหรับการศึกษาผลกระทบของอวกาศ เงื่อนไขของวัสดุ สำหรับการทดสอบและการทำงานของระบบบนเครื่องบิน) และดาวเทียมอื่นๆ ที่มีไว้สำหรับการบินของมนุษย์เรียกว่ายานอวกาศที่มีมนุษย์ควบคุม AES ในวงโคจรเส้นศูนย์สูตรที่วางอยู่ใกล้ระนาบของเส้นศูนย์สูตรเรียกว่าเส้นศูนย์สูตร ดาวเทียมในวงโคจรขั้ว (หรือ circumpolar) ที่โคจรใกล้ขั้วโลกเรียกว่าขั้ว AES ปล่อยสู่วงโคจรเส้นศูนย์สูตรวงกลม ตั้งอยู่ที่ 35860 กม.จากพื้นผิวโลกและเคลื่อนที่ไปในทิศทางที่สอดคล้องกับทิศทางการหมุนของโลก "แขวน" นิ่งเหนือจุดหนึ่งของพื้นผิวโลก ดาวเทียมดังกล่าวเรียกว่านิ่ง ขั้นตอนสุดท้ายของยานยิง กรวยจมูก และส่วนอื่นๆ ที่แยกออกจากดาวเทียมในระหว่างการปล่อยสู่วงโคจร เป็นวัตถุในวงโคจรรอง พวกมันมักจะไม่เรียกว่าดาวเทียม แม้ว่าพวกมันจะโคจรรอบโลกและในบางกรณีก็ใช้เป็นวัตถุสังเกตการณ์เพื่อวัตถุประสงค์ทางวิทยาศาสตร์
ตามระบบสากลของการลงทะเบียนวัตถุอวกาศ (ดาวเทียม, ยานสำรวจอวกาศ (ดู) ฯลฯ ) ภายใน องค์การระหว่างประเทศ COSPAR ในปี 1957-1962 วัตถุอวกาศถูกกำหนดโดยปีที่ปล่อยด้วยการเพิ่มตัวอักษรกรีกที่สอดคล้องกับหมายเลขลำดับของการเปิดตัวในปีที่กำหนดและตัวเลขอารบิก - จำนวนของวัตถุในวงโคจรขึ้นอยู่กับความสว่างหรือ ระดับความสำคัญทางวิทยาศาสตร์ ดังนั้น 2500α2 - การกำหนดดาวเทียมโซเวียตดวงแรกที่เปิดตัวในปี 2500 1957α1 - การกำหนดระยะสุดท้ายของยานเปิดตัวของดาวเทียมนี้ (ยานเปิดตัวนั้นสว่างกว่า) เมื่อจำนวนการเปิดตัวเพิ่มขึ้น ตั้งแต่วันที่ 1 มกราคม 1963 เป็นต้นไป วัตถุอวกาศก็เริ่มกำหนดโดยปีที่ปล่อย หมายเลขลำดับการเปิดตัวในปีนั้น และอักษรตัวพิมพ์ใหญ่ของตัวอักษรละติน (บางครั้งก็แทนที่ด้วยเลขลำดับด้วย) . ดังนั้นดาวเทียม "Interkosmos-1" จึงมีชื่อ: 1969 88A หรือ 1969 088 01 โปรแกรมระดับชาติสำหรับการวิจัยอวกาศ ดาวเทียมชุดหนึ่งมักมีชื่อเป็นของตัวเองว่า "คอสมอส" (USSR) "นักสำรวจ" (สหรัฐฯ) "ไดอาเดม" (ฝรั่งเศส) เป็นต้น ในต่างประเทศ คำว่า "ดาวเทียม" จนถึงปี พ.ศ. 2512 ใช้เฉพาะใน สัมพันธ์กับดาวเทียมโซเวียต ในปี พ.ศ. 2511-2512 ขณะเตรียมพจนานุกรมจักรวาลหลายภาษาสากล ได้มีการบรรลุข้อตกลงตามที่ใช้คำว่า "ดาวเทียม" กับดาวเทียมที่ปล่อยในประเทศใดๆ
ตามความหลากหลายของปัญหาทางวิทยาศาสตร์และประยุกต์ที่แก้ไขได้ด้วยความช่วยเหลือของดาวเทียม ดาวเทียมสามารถมีขนาด น้ำหนัก รูปแบบการออกแบบ และองค์ประกอบของอุปกรณ์บนเครื่องบินที่แตกต่างกัน ตัวอย่างเช่น มวลของดาวเทียมที่เล็กที่สุด (จากซีรี่ส์ EPC) มีค่าเพียง 0.7 กิโลกรัม; ดาวเทียมโซเวียต "Proton-4" มีมวลประมาณ 17 ตู่... มวลของสถานีโคจรสลุตที่มียานอวกาศโซยุซเทียบท่าอยู่นั้นมากกว่า 25 ตู่... มวลที่ใหญ่ที่สุดของน้ำหนักบรรทุกที่ปล่อยสู่วงโคจรโดยดาวเทียมคือประมาณ135 ตู่(ยานอวกาศอพอลโลของอเมริกากับขั้นตอนสุดท้ายของยานเปิดตัว) แยกแยะระหว่างดาวเทียมอัตโนมัติ (การวิจัยและประยุกต์) ซึ่งการทำงานของเครื่องมือและระบบทั้งหมดถูกควบคุมโดยคำสั่งที่มาจากโลกหรือจากอุปกรณ์ซอฟต์แวร์บนเรือ เรือดาวเทียมบรรจุคน และสถานีโคจรพร้อมลูกเรือ
เพื่อแก้ปัญหาทางวิทยาศาสตร์และประยุกต์ จำเป็นต้องวางดาวเทียมในลักษณะที่แน่นอนในอวกาศ และประเภทของการวางแนวจะถูกกำหนดโดยวัตถุประสงค์ของดาวเทียมหรือคุณสมบัติของอุปกรณ์ที่ติดตั้งเป็นหลัก ดังนั้นการวางแนวของวงโคจรซึ่งแกนใดแกนหนึ่งถูกชี้นำในแนวตั้งอย่างต่อเนื่องมีดาวเทียมที่มีไว้สำหรับสังเกตวัตถุบนพื้นผิวและในชั้นบรรยากาศของโลก AES สำหรับการวิจัยทางดาราศาสตร์นั้นนำโดยวัตถุท้องฟ้า: ดวงดาว, ดวงอาทิตย์ โดยคำสั่งจากภาคพื้นดินหรือโดยโปรแกรมที่กำหนด การวางแนวสามารถเปลี่ยนแปลงได้ ในบางกรณี ดาวเทียมทั้งหมดไม่ได้อยู่ในทิศทาง แต่มีองค์ประกอบบางอย่างเท่านั้น ตัวอย่างเช่น เสาอากาศที่มีทิศทางสูง - ไปยังจุดกราวด์, แบตเตอรี่พลังงานแสงอาทิตย์ - ไปยังดวงอาทิตย์ เพื่อให้ทิศทางของแกนหนึ่งของดาวเทียมยังคงไม่เปลี่ยนแปลงในอวกาศ บอกให้หมุนรอบแกนนี้ สำหรับการปฐมนิเทศยังใช้ระบบแรงโน้มถ่วงแอโรไดนามิกและแม่เหล็ก - ระบบควบคุมทัศนคติแบบพาสซีฟที่เรียกว่าและระบบที่ติดตั้งอวัยวะควบคุมปฏิกิริยาหรือเฉื่อย (โดยปกติบนดาวเทียมและยานอวกาศที่ซับซ้อน) - ระบบทัศนคติเชิงรุก AES พร้อมเครื่องยนต์เจ็ตสำหรับการเคลื่อนตัว การแก้ไขวิถีโคจร หรือการโคจรจากวงโคจร ติดตั้งระบบควบคุมการเคลื่อนไหว ซึ่งเป็นส่วนประกอบในระบบควบคุมทัศนคติ
แหล่งจ่ายไฟของอุปกรณ์ออนบอร์ดของดาวเทียมส่วนใหญ่ทำจากแผงโซลาร์เซลล์ซึ่งแผงนั้นตั้งฉากกับทิศทางของรังสีดวงอาทิตย์หรือตั้งอยู่เพื่อให้บางส่วนได้รับแสงสว่างจากดวงอาทิตย์ ณ ตำแหน่งใด ๆ ที่สัมพันธ์กับ ดาวเทียม (แผงโซลาร์เซลล์รอบทิศทางที่เรียกว่า) แผงโซลาร์เซลล์รับรองการใช้งานอุปกรณ์ออนบอร์ดในระยะยาว (นานถึงหลายปี) AES ออกแบบมาสำหรับระยะเวลาการทำงานที่จำกัด (ไม่เกิน 2-3 สัปดาห์) ใช้แหล่งพลังงานเคมีไฟฟ้า - แบตเตอรี่ เซลล์เชื้อเพลิง ดาวเทียมบางดวงมีเครื่องกำเนิดพลังงานไฟฟ้าแบบไอโซโทปอยู่บนเรือ ระบบการระบายความร้อนของดาวเทียมที่จำเป็นสำหรับการทำงานของอุปกรณ์ออนบอร์ดนั้นรองรับโดยระบบควบคุมความร้อน
ในดาวเทียมที่มีการปล่อยความร้อนอย่างมีนัยสำคัญจากอุปกรณ์และในยานอวกาศจะใช้ระบบที่มีการถ่ายเทความร้อนด้วยของเหลว บนดาวเทียมที่มีอุปกรณ์ปล่อยความร้อนต่ำในบางกรณีถูกจำกัดด้วยวิธีการควบคุมความร้อนแบบพาสซีฟ (การเลือกพื้นผิวภายนอกที่มีค่าสัมประสิทธิ์ทางแสงที่เหมาะสม ฉนวนป้องกันความร้อนของแต่ละองค์ประกอบ)
การส่งข้อมูลทางวิทยาศาสตร์และข้อมูลอื่นๆ จากดาวเทียมมายังโลกนั้นดำเนินการโดยใช้ระบบการวัดทางไกลด้วยคลื่นวิทยุ (มักมีอุปกรณ์จัดเก็บข้อมูลบนเครื่องบินสำหรับบันทึกข้อมูลในช่วงเวลาของการบินของดาวเทียมนอกโซนการมองเห็นวิทยุของสถานีภาคพื้นดิน)
เรือดาวเทียมที่มีคนขับและดาวเทียมอัตโนมัติบางลำมีพาหนะที่เคลื่อนลงมาเพื่อกลับสู่โลกของลูกเรือ เครื่องดนตรีแต่ละชิ้น ภาพยนตร์ และสัตว์ทดลอง
การเคลื่อนไหว AES AES ถูกปล่อยสู่วงโคจรโดยใช้ยานพาหนะปล่อยจรวดแบบหลายขั้นตอนแบบอัตโนมัติ ซึ่งย้ายจากจุดเริ่มต้นไปยังจุดการออกแบบที่แน่นอนในอวกาศเนื่องจากแรงขับที่พัฒนาโดยเครื่องยนต์ไอพ่น เส้นทางนี้เรียกว่าวิถีโคจรของดาวเทียมในวงโคจร หรือส่วนที่เคลื่อนไหวของจรวด มักจะมีระยะตั้งแต่หลายร้อยถึงสองหรือสามพันเมตร กม.... จรวดจะสตาร์ท เคลื่อนที่ในแนวตั้งขึ้น และเคลื่อนผ่านชั้นบรรยากาศที่หนาแน่นที่สุดของโลกด้วยความเร็วที่ค่อนข้างต่ำ (ซึ่งจะช่วยลดต้นทุนด้านพลังงานเพื่อเอาชนะแรงต้านของบรรยากาศ) เมื่อมันลอยขึ้น จรวดจะค่อยๆ หมุนไปรอบๆ และทิศทางของการเคลื่อนที่จะใกล้เคียงกับแนวนอน ในส่วนที่เกือบจะเป็นแนวนอนนี้ แรงขับของจรวดไม่ได้ถูกใช้เพื่อเอาชนะผลการเบรกของแรงโน้มถ่วงของโลกและแรงต้านของชั้นบรรยากาศ แต่ส่วนใหญ่อยู่ที่การเพิ่มความเร็ว หลังจากที่จรวดไปถึงความเร็วการออกแบบ (ในขนาดและทิศทาง) ที่ส่วนท้ายของส่วนแอคทีฟ การทำงานของเครื่องยนต์ไอพ่นจะหยุดลง นี่คือจุดที่เรียกว่าการสอดดาวเทียมเข้าไปในวงโคจร ยานอวกาศที่เปิดตัวซึ่งมีขั้นตอนสุดท้ายของจรวดจะแยกออกจากยานอวกาศโดยอัตโนมัติและเริ่มเคลื่อนที่ในวงโคจรที่สัมพันธ์กับโลกกลายเป็นวัตถุท้องฟ้าเทียม การเคลื่อนที่ขึ้นอยู่กับแรงเฉื่อย (แรงดึงดูดของโลก ดวงจันทร์ ดวงอาทิตย์ และดาวเคราะห์ดวงอื่น แรงต้านของชั้นบรรยากาศโลก ฯลฯ) และกำลังแอคทีฟ (ควบคุม) หากติดตั้งเครื่องยนต์เจ็ตพิเศษไว้บน ขึ้นยานอวกาศ ประเภทของวงโคจรเริ่มต้นของดาวเทียมที่สัมพันธ์กับโลกนั้นขึ้นอยู่กับตำแหน่งและความเร็วเมื่อสิ้นสุดส่วนการเคลื่อนที่ที่ทำงานอยู่ (ในขณะที่ดาวเทียมเข้าสู่วงโคจร) และคำนวณทางคณิตศาสตร์โดยใช้วิธีกลศาสตร์ท้องฟ้า ถ้าความเร็วนี้เท่ากับหรือเกินกว่า (แต่ไม่เกิน 1.4 เท่า) ความเร็วจักรวาลแรก (ดู) (ประมาณ 8 กม./วินาทีใกล้พื้นผิวโลก) และทิศทางของมันไม่ได้เบี่ยงเบนไปจากแนวราบอย่างรุนแรง จากนั้นยานอวกาศจะเข้าสู่วงโคจรของดาวเทียมโลก จุดที่ดาวเทียมเข้าสู่วงโคจรในกรณีนี้ตั้งอยู่ใกล้จุดสิ้นสุดของวงโคจร นอกจากนี้ยังสามารถเข้าสู่วงโคจรที่จุดอื่น ๆ ของวงโคจรได้เช่นใกล้จุดสุดยอด แต่เนื่องจากในกรณีนี้วงโคจรของดาวเทียมอยู่ด้านล่างจุดปล่อยตัวจุดปล่อยตัวจึงควรอยู่สูงพอในขณะที่ ความเร็วที่ส่วนท้ายของเซ็กเมนต์ที่ใช้งานอยู่ควรน้อยกว่าวงกลมเล็กน้อย
ในการประมาณค่าแรก วงโคจรของดาวเทียมจะเป็นวงรีที่มีจุดโฟกัสอยู่ที่ศูนย์กลางของโลก (ในบางกรณีคือวงกลม) ซึ่งจะคงตำแหน่งคงที่ในอวกาศ การเคลื่อนที่ในวงโคจรดังกล่าวเรียกว่าไม่ถูกรบกวนและสอดคล้องกับสมมติฐานที่ว่าโลกดึงดูดตามกฎของนิวตันเหมือนลูกบอลที่มีการกระจายความหนาแน่นทรงกลมและมีเพียงแรงดึงดูดของโลกเท่านั้นที่กระทำต่อดาวเทียม
ปัจจัยต่างๆ เช่น ความต้านทานของชั้นบรรยากาศของโลก การกดทับของโลก ความกดดัน รังสีดวงอาทิตย์แรงดึงดูดของดวงจันทร์และดวงอาทิตย์เป็นสาเหตุของการเบี่ยงเบนจากการเคลื่อนไหวที่ไม่ถูกรบกวน การศึกษาความเบี่ยงเบนเหล่านี้ทำให้สามารถรับข้อมูลใหม่เกี่ยวกับคุณสมบัติของชั้นบรรยากาศของโลกบนสนามโน้มถ่วงของโลกได้ เนื่องจากความต้านทานของชั้นบรรยากาศ ดาวเทียมจึงเคลื่อนที่ในวงโคจรด้วย perigee ที่ระดับความสูงหลายร้อย กม.ค่อยๆ ลดลงและตกลงสู่ชั้นบรรยากาศที่ค่อนข้างหนาแน่นที่ระดับความสูง 120-130 กม.และด้านล่างยุบและไหม้ พวกมันจึงมีช่วงชีวิตที่จำกัด ตัวอย่างเช่น ดาวเทียมโซเวียตดวงแรกอยู่ในขณะเข้าสู่วงโคจรที่ระดับความสูงประมาณ 228 กม.เหนือพื้นผิวโลกและมีความเร็วเกือบในแนวนอนประมาณ 7.97 กม./วินาทีกึ่งแกนเอกของวงโคจรวงรี (เช่น ระยะทางเฉลี่ยจากศูนย์กลางโลก) อยู่ที่ประมาณ 6950 กม., ระยะเวลาจำหน่าย 96.17 นาทีและจุดที่น้อยที่สุดและไกลที่สุดของวงโคจร (perigee และ apogee) อยู่ที่ความสูงประมาณ 228 และ 947 กม.ตามลำดับ ดาวเทียมมีอยู่จนถึงวันที่ 4 มกราคม 2501 เมื่อดาวเทียมเข้าสู่ชั้นบรรยากาศหนาแน่นเนื่องจากการรบกวนในวงโคจร
วงโคจรที่ดาวเทียมถูกปล่อยทันทีหลังจากส่วนเร่งความเร็วของจรวดบูสเตอร์นั้นบางครั้งอยู่ตรงกลางเท่านั้น ในกรณีนี้ มีเครื่องยนต์ไอพ่นอยู่บนดาวเทียม ซึ่งเปิดใช้งานในช่วงเวลาสั้น ๆ ตามคำสั่งจากพื้นโลก ทำให้ดาวเทียมมีความเร็วเพิ่มขึ้น ส่งผลให้ดาวเทียมถูกส่งไปยังวงโคจรอื่น โดยปกติแล้ว สถานีอวกาศอัตโนมัติจะถูกส่งไปยังวงโคจรของดาวเทียม Earth ก่อน จากนั้นจึงโอนโดยตรงไปยังเส้นทางการบินไปยังดวงจันทร์หรือดาวเคราะห์
การสังเกต AESการควบคุมการเคลื่อนที่ของดาวเทียมและวัตถุในวงโคจรทุติยภูมิทำได้โดยการสังเกตจากสถานีภาคพื้นดินพิเศษ จากผลการสังเกตดังกล่าว องค์ประกอบของวงโคจรของดาวเทียมจะถูกระบุและคำนวณหาค่า ephemeris สำหรับการสังเกตการณ์ที่จะเกิดขึ้น รวมทั้งเพื่อแก้ปัญหาทางวิทยาศาสตร์และประยุกต์ต่างๆ ตามอุปกรณ์สังเกตการณ์ที่ใช้ ดาวเทียมแบ่งออกเป็นวิศวกรรมแสง วิทยุ เลเซอร์; เพื่อเป้าหมายสูงสุด - สำหรับตำแหน่ง (การกำหนดทิศทางบนดาวเทียม) และการสังเกตด้วยเครื่องวัดระยะ การวัดความเร็วเชิงมุมและเชิงพื้นที่
การสังเกตตำแหน่งที่ง่ายที่สุดคือการสังเกตด้วยภาพ (ออปติคัล) ซึ่งดำเนินการโดยใช้เครื่องมือเกี่ยวกับการมองเห็นด้วยสายตา และทำให้สามารถกำหนดพิกัดท้องฟ้าของดาวเทียมได้ด้วยความแม่นยำสูงสุดหลายนาทีของส่วนโค้ง ในการแก้ปัญหาทางวิทยาศาสตร์ การสังเกตด้วยภาพถ่ายจะดำเนินการโดยใช้กล้องดาวเทียม (ดู) ซึ่งให้ความแม่นยำในการกำหนดตำแหน่งสูงสุด 1-2 "" และ 0.001 วินาทีตามเวลา. การสังเกตด้วยแสงจะเกิดขึ้นได้ก็ต่อเมื่อดาวเทียมส่องสว่างด้วยแสงแดดเท่านั้น (ยกเว้นดาวเทียม geodetic ที่ติดตั้งแหล่งกำเนิดแสงแบบพัลซิ่ง สามารถสังเกตได้ในขณะที่อยู่ในเงาของโลก) ท้องฟ้าเหนือสถานีมืดเพียงพอและสภาพอากาศเอื้ออำนวย การสังเกต เงื่อนไขเหล่านี้จำกัดความเป็นไปได้ของการสังเกตด้วยแสงอย่างมาก ขึ้นอยู่กับเงื่อนไขดังกล่าวน้อยกว่าคือวิธีการทางเทคนิคทางวิทยุสำหรับการสังเกตดาวเทียมซึ่งเป็นวิธีการหลักในการสังเกตดาวเทียมในช่วงเวลาของการทำงานของระบบวิทยุพิเศษที่ติดตั้งไว้ การสังเกตดังกล่าวประกอบด้วยการรับและวิเคราะห์สัญญาณวิทยุ ซึ่งสร้างขึ้นโดยเครื่องส่งสัญญาณวิทยุบนเครื่องบินของดาวเทียม หรือส่งจากพื้นโลกและถ่ายทอดโดยดาวเทียม การเปรียบเทียบเฟสของสัญญาณที่ได้รับจากเสาอากาศที่มีระยะห่างหลายอัน (อย่างน้อยสาม) ช่วยให้คุณสามารถกำหนดตำแหน่งของดาวเทียมในทรงกลมท้องฟ้าได้ ความแม่นยำของการสังเกตดังกล่าวอยู่ที่ประมาณ 3 "ในตำแหน่งและประมาณ 0.001 วินาทีตามเวลา. การวัดการเปลี่ยนแปลงความถี่ดอปเปลอร์ (ดู) ของสัญญาณวิทยุทำให้สามารถระบุความเร็วสัมพัทธ์ของดาวเทียม ระยะทางต่ำสุดระหว่างเส้นทางที่สังเกตได้ และช่วงเวลาที่ดาวเทียมอยู่ในระยะนี้ การสังเกตที่ดำเนินการพร้อมกันจากสามจุดทำให้สามารถคำนวณได้ ความเร็วเชิงมุมดาวเทียม.
การสังเกตการณ์ด้วยเครื่องวัดระยะทำได้โดยการวัดช่วงเวลาระหว่างการส่งสัญญาณวิทยุจากโลกและการรับสัญญาณหลังจากการส่งสัญญาณซ้ำโดยเครื่องตอบรับวิทยุดาวเทียมบนเครื่องบิน การวัดระยะทางไปยังดาวเทียมที่แม่นยำที่สุดนั้นมาจากเครื่องวัดระยะด้วยเลเซอร์ (ความแม่นยำสูงสุด 1-2 มและสูงกว่า) ระบบเรดาร์ใช้สำหรับการสังเกตการณ์ทางวิทยุเทคนิคของวัตถุอวกาศแบบพาสซีฟ
วิจัยดาวเทียมอุปกรณ์ที่ติดตั้งบนดาวเทียม รวมถึงการสังเกตการณ์ดาวเทียมจากสถานีภาคพื้นดิน ทำให้สามารถดำเนินการวิจัยทางธรณีฟิสิกส์ ดาราศาสตร์ ภูมิสารสนเทศ และอื่นๆ ได้หลากหลาย วงโคจรของดาวเทียมดังกล่าวมีหลากหลาย - จากเกือบเป็นวงกลมที่ระดับความสูง 200-300 กม.เป็นรูปวงรียาวมีความสูงยอดถึง 500 พัน กม.... ดาวเทียมวิจัยประกอบด้วยดาวเทียมโซเวียตดวงแรก, ดาวเทียมโซเวียตของซีรีส์ "", "", "" ", ดาวเทียมอเมริกันของ" Avangard "," Explorer "," OGO "," OSO "," หอดูดาวดาราศาสตร์); ดาวเทียมอังกฤษ "Ariel" ดาวเทียมฝรั่งเศส "Diadem" และอื่น ๆ ดาวเทียมวิจัยคิดเป็นประมาณครึ่งหนึ่งของดาวเทียมที่เปิดตัวทั้งหมด
ด้วยความช่วยเหลือของเครื่องมือทางวิทยาศาสตร์ที่ติดตั้งบนดาวเทียมจะทำการศึกษาองค์ประกอบที่เป็นกลางและไอออนิกของบรรยากาศชั้นบนความดันและอุณหภูมิตลอดจนการเปลี่ยนแปลงของพารามิเตอร์เหล่านี้ ความเข้มข้นของอิเล็กตรอนในไอโอโนสเฟียร์และการแปรผันได้รับการศึกษาโดยใช้ทั้งอุปกรณ์ออนบอร์ดและโดยการสังเกตการส่งสัญญาณวิทยุจากบีคอนวิทยุออนบอร์ดผ่านไอโอโนสเฟียร์ ด้วยความช่วยเหลือของ ionosondes โครงสร้างของส่วนบนของบรรยากาศรอบนอก (เหนือความเข้มข้นสูงสุดของอิเล็กตรอนหลัก) และการเปลี่ยนแปลงของความเข้มข้นของอิเล็กตรอนขึ้นอยู่กับละติจูด geomagnetic ช่วงเวลาของวัน ฯลฯ ได้รับการศึกษาอย่างละเอียด ความเข้าใจ กลไกของกระบวนการในชั้นบรรยากาศและการแก้ปัญหาในทางปฏิบัติ เช่น การพยากรณ์การสื่อสารทางวิทยุ การพยากรณ์สถานะของบรรยากาศชั้นบน เป็นต้น
ด้วยความช่วยเหลือของดาวเทียม พวกเขาถูกค้นพบและตรวจสอบ นอกจากยานสำรวจอวกาศแล้ว ดาวเทียมยังทำให้สามารถศึกษาโครงสร้างของแมกนีโตสเฟียร์ของโลก (ดู) และธรรมชาติของการไหลของมันรอบ ๆ ลมสุริยะ ตลอดจนลักษณะของลมสุริยะเอง (ดู) (ความหนาแน่นของฟลักซ์และพลังงานของ อนุภาคขนาดและธรรมชาติของสนามแม่เหล็ก "แช่แข็ง") ฯลฯ ไม่สามารถเข้าถึงได้สำหรับการสังเกตการณ์รังสีดวงอาทิตย์บนพื้นดิน - อัลตราไวโอเลตและรังสีเอกซ์ซึ่งเป็นที่สนใจอย่างมากจากมุมมองของการทำความเข้าใจความสัมพันธ์ระหว่างดวงอาทิตย์และโลก ดาวเทียมประยุกต์บางดวงยังให้ข้อมูลที่มีค่าสำหรับการวิจัยทางวิทยาศาสตร์อีกด้วย ดังนั้นผลการสำรวจดาวเทียมอุตุนิยมวิทยาจึงถูกนำมาใช้กันอย่างแพร่หลายในการศึกษาธรณีฟิสิกส์ต่างๆ
ผลการสังเกตการณ์ AES ทำให้สามารถระบุการรบกวนของวงโคจร AES ได้อย่างแม่นยำ การเปลี่ยนแปลงความหนาแน่นของบรรยากาศชั้นบน (เนื่องจากปรากฏการณ์ต่างๆ ของกิจกรรมสุริยะ) กฎการหมุนเวียนของบรรยากาศ โครงสร้างของแรงโน้มถ่วงของโลก ภาคสนาม ฯลฯ การสังเกตการณ์ดาวเทียมแบบซิงโครนัสแบบซิงโครนัสตามตำแหน่งและตัวค้นหาระยะที่จัดเป็นพิเศษ (พร้อมกันจากหลายสถานี) โดยใช้วิธีการวัดพิกัดของดาวเทียม (ดู) ช่วยให้สามารถอ้างอิงพิกัดทางภูมิศาสตร์ของจุดต่างๆ ได้หลายพันจุด กม.จากกันและกัน ศึกษาการเคลื่อนที่ของทวีป ฯลฯ
ดาวเทียมประยุกต์ดาวเทียมประยุกต์ ได้แก่ ดาวเทียมที่เปิดตัวเพื่อแก้ปัญหาด้านเทคนิค เศรษฐกิจ และการทหารต่างๆ
ดาวเทียมสื่อสารใช้เพื่อส่งสัญญาณโทรทัศน์ โทรศัพท์วิทยุ โทรเลข และการสื่อสารประเภทอื่นๆ ระหว่างสถานีภาคพื้นดิน ซึ่งอยู่ห่างจากกันไม่เกิน 10-15,000 เมตร กม.... อุปกรณ์วิทยุบนเครื่องบินของดาวเทียมดังกล่าวรับสัญญาณจากสถานีวิทยุภาคพื้นดิน ขยายสัญญาณและส่งสัญญาณซ้ำไปยังสถานีวิทยุภาคพื้นดินอื่นๆ ดาวเทียมสื่อสารจะแสดงบน วงโคจรสูง(สูงสุด 40,000. กม.). ดาวเทียมประเภทนี้ ได้แก่ ดาวเทียมโซเวียต " " , ดาวเทียมอเมริกัน "Sinkom", ดาวเทียม "Intelsat" ฯลฯ ดาวเทียมสื่อสารที่ปล่อยสู่วงโคจรคงที่นั้นตั้งอยู่เหนือพื้นที่บางส่วนของพื้นผิวโลกอย่างต่อเนื่อง
ดาวเทียมอุตุนิยมวิทยาได้รับการออกแบบสำหรับการส่งสัญญาณปกติไปยังสถานีภาคพื้นดินของภาพโทรทัศน์ที่มีเมฆมาก หิมะ และน้ำแข็งปกคลุมบนพื้นโลก ข้อมูลเกี่ยวกับการแผ่รังสีความร้อนของพื้นผิวโลกและเมฆ ฯลฯ AES ประเภทนี้จะเปิดตัวในวงโคจรใกล้กับวงกลม ด้วยระดับความสูง 500-600 กม.สูงถึง 1200-1500 กม.; แนวของพวกเขาถึง 2-3 พัน กม.... ดาวเทียมอุตุนิยมวิทยา ได้แก่ ดาวเทียมโซเวียตบางดวงในซีรีส์ Kosmos ดาวเทียม ดาวเทียมอเมริกัน Tyros, ESSA และ Nimbus กำลังดำเนินการทดลองกับการสังเกตการณ์อุตุนิยมวิทยาทั่วโลกจากระดับความสูงถึง 40,000 กม.(ดาวเทียมโซเวียต "Molniya-1", ดาวเทียมอเมริกัน "ATS")
มีแนวโน้มเป็นพิเศษในแง่ของการใช้งานใน เศรษฐกิจของประเทศเป็นดาวเทียมสำหรับการวิจัย ทรัพยากรธรรมชาติโลก. นอกจากการสังเกตการณ์ด้านอุตุนิยมวิทยา สมุทรศาสตร์ และอุทกวิทยาแล้ว ดาวเทียมดังกล่าวยังช่วยให้ได้รับข้อมูลการดำเนินงานที่จำเป็นสำหรับธรณีวิทยา เกษตรกรรม การประมง ป่าไม้ และการควบคุมมลภาวะต่อสิ่งแวดล้อม ผลลัพธ์ที่ได้จากการใช้ดาวเทียมและยานอวกาศที่มีมนุษย์ควบคุมในด้านหนึ่ง และการควบคุมการวัดจากกระบอกสูบและเครื่องบิน ในอีกทางหนึ่ง แสดงให้เห็นถึงโอกาสในการพัฒนางานวิจัยด้านนี้
ดาวเทียมนำทางซึ่งทำงานด้วยระบบสนับสนุนภาคพื้นดินพิเศษนั้นใช้สำหรับการนำทางของเรือเดินทะเลรวมถึงเรือใต้น้ำ ยานอวกาศที่รับสัญญาณวิทยุและกำหนดตำแหน่งสัมพันธ์กับดาวเทียมซึ่งทราบพิกัดในวงโคจรทุกขณะด้วยความแม่นยำสูงกำหนดตำแหน่งของมัน ดาวเทียมอเมริกัน "Transit" และ "Navsat" เป็นตัวอย่างของดาวเทียมนำทาง
เรือดาวเทียมบรรจุคนเรือดาวเทียมที่มีคนขับและสถานีโคจรที่มีคนควบคุมเป็นดาวเทียมที่มีความซับซ้อนและซับซ้อนที่สุด ตามกฎแล้วออกแบบมาเพื่อแก้ปัญหาที่หลากหลายก่อนอื่น - เพื่อดำเนินการวิจัยทางวิทยาศาสตร์ที่ครอบคลุมพัฒนาเทคโนโลยีอวกาศศึกษาทรัพยากรธรรมชาติของโลก ฯลฯ "นักบินอวกาศ Yu. A. Gagarin ทำการบินรอบโลกในวงโคจรด้วยระดับความสูง 327 กม.... เมื่อวันที่ 20 กุมภาพันธ์ พ.ศ. 2505 ยานอวกาศอเมริกันลำแรกที่มีนักบินอวกาศ J. Glenn เข้าสู่วงโคจร ขั้นตอนใหม่ในการสำรวจอวกาศด้วยความช่วยเหลือจากดาวเทียมบรรจุคนคือการบินของสถานีโคจรของโซเวียต "" ซึ่งในเดือนมิถุนายน พ.ศ. 2514 ลูกเรือของ G. T. Dobrovolsky, V. N. Volkov และ V. I. Patsaev ได้ดำเนินการโปรแกรมทางวิทยาศาสตร์และเทคนิคที่กว้างขวาง ชีวการแพทย์และ งานวิจัยอื่นๆ
ไฟ .: Aleksandrov S.G. , Fedorov R.E. , ดาวเทียมและยานอวกาศของสหภาพโซเวียต, 2nd ed., M. , 1961; Elyasberg P. Ye., บทนำสู่ทฤษฎีการบินของดาวเทียมโลกเทียม, มอสโก, 2508; Ruppé G.O., Introduction to Astronautics, ทรานส์ จากภาษาอังกฤษ t. 1, M. , 1970; Levantovsky V.I. , กลศาสตร์การบินอวกาศในการนำเสนอเบื้องต้น, M. , 1970; King-Healy D. , ทฤษฎีการโคจรของดาวเทียมเทียมในชั้นบรรยากาศ, ทรานส์. จากภาษาอังกฤษ, M. , 1966; Ryabov Yu. A. , การเคลื่อนไหวของเทห์ฟากฟ้า, M. , 1962; Meller I., ข้อมูลเบื้องต้นเกี่ยวกับ geodesy ดาวเทียม, ทรานส์. จากภาษาอังกฤษ, M., 1967. See also lit. ที่อาร์ท. ยานอวกาศ
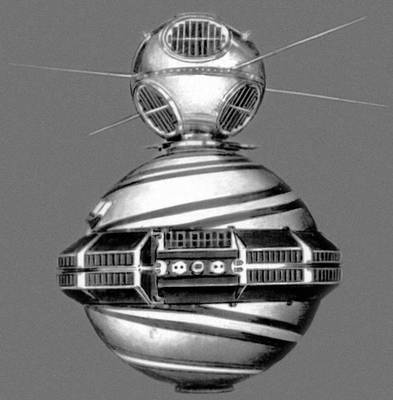
ดาวเทียมเทียมต่างประเทศของโลก "ทางผ่าน".
ดาวเทียมเทียมต่างประเทศของโลก "ออสการ์-3".
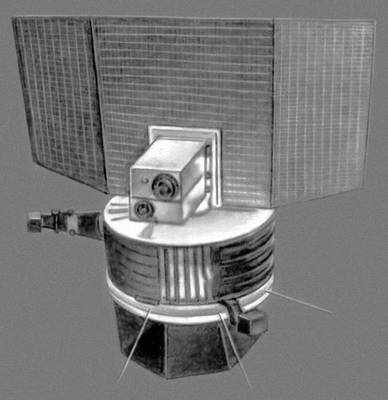
ดาวเทียมเทียมต่างประเทศของโลก "โอเอสโอ-1"
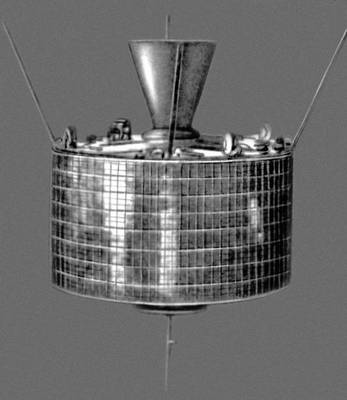
ดาวเทียมเทียมต่างประเทศของโลก "สินคำ-3".
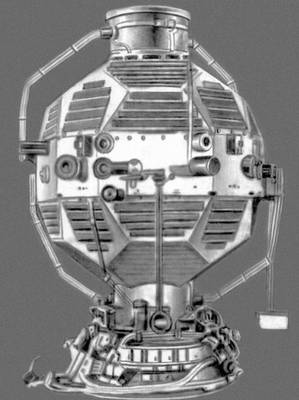
ดาวเทียมเทียมต่างประเทศของโลก "นักสำรวจ-25"