ในวงโคจรของ geostationary ดาวเทียมจะไม่เข้าใกล้โลกและไม่เคลื่อนออกจากมัน และนอกจากนี้ ในขณะที่หมุนไปพร้อมกับโลก ดาวเทียมจะตั้งอยู่เหนือจุดใดๆ บนเส้นศูนย์สูตรอย่างต่อเนื่อง ดังนั้นแรงโน้มถ่วงและแรงเหวี่ยงที่กระทำต่อดาวเทียมจะต้องสมดุลกัน ในการคำนวณความสูงของวงโคจรค้างฟ้า คุณสามารถใช้เมธอด กลศาสตร์คลาสสิกและเมื่อเปลี่ยนไปใช้กรอบอ้างอิงของดาวเทียมแล้ว ให้ดำเนินการจากสมการต่อไปนี้:
แรงเฉื่อยอยู่ที่ไหน และในกรณีนี้ แรงเหวี่ยงหนีศูนย์กลาง คือ แรงโน้มถ่วง กฎหมายกำหนดขนาดของแรงโน้มถ่วงที่กระทำต่อดาวเทียมได้ แรงโน้มถ่วงนิวตัน:
![]()
โดยที่มวลของดาวเทียมคือมวลของโลกเป็นกิโลกรัม คือค่าคงตัวโน้มถ่วง และเป็นรัศมีของวงโคจร (ระยะทางเป็นเมตรจากดาวเทียมถึงศูนย์กลางของโลก)
ขนาดของแรงเหวี่ยงหนีศูนย์กลางคือ:
โดยที่ความเร่งสู่ศูนย์กลางที่เกิดขึ้นระหว่างการเคลื่อนที่เป็นวงกลมตามวงโคจรอยู่ที่ไหน
ดังจะเห็นได้ว่ามวลของดาวเทียมมีอยู่ในนิพจน์สำหรับทั้งแรงเหวี่ยงหนีศูนย์กลางและแรงโน้มถ่วง กล่าวคือ ความสูงของวงโคจรไม่ได้ขึ้นอยู่กับมวลของดาวเทียม ซึ่งเป็นจริงสำหรับวงโคจรใดๆ และเป็นผลมาจากความเท่าเทียมกันของมวลแรงโน้มถ่วงและแรงเฉื่อย ดังนั้น วงโคจรของ geostationary ถูกกำหนดโดยความสูงที่แรงเหวี่ยงหนีศูนย์กลางจะเท่ากันในค่าสัมบูรณ์และตรงข้ามกับแรงโน้มถ่วงที่เกิดจากแรงดึงดูดของโลกที่ความสูงที่กำหนด
ความเร่งสู่ศูนย์กลางคือ:
ความเร็วเชิงมุมของดาวเทียมอยู่ที่ไหนในหน่วยเรเดียนต่อวินาที
จากความเท่าเทียมกันของแรงโน้มถ่วงและแรงเหวี่ยง เราได้รับ:
![]()
ความเร็วเชิงมุม ω
คำนวณโดยการหารมุมที่เคลื่อนที่ในหนึ่งรอบด้วยระยะเวลาของการปฏิวัติ (เวลาที่หนึ่ง เลี้ยวเต็มวงโคจร: วันดาวฤกษ์หนึ่งวันหรือ 86,164 วินาที) เราได้รับ: ![]() rad/s
rad/s
รัศมีของวงโคจรโดยประมาณคือ 42,164 กม. การลบรัศมีเส้นศูนย์สูตรของโลกคือ 6,378 กม. ทำให้ GSO มีความสูง 35,786 กม.
ความเร็วของวงโคจร
ความเร็วของการเคลื่อนที่ในวงโคจรค้างฟ้าคำนวณโดยการคูณความเร็วเชิงมุมด้วยรัศมีของวงโคจร: km/s
ซึ่งน้อยกว่าความเร็วหลบหนีแรกที่ 8 กม./วินาที ประมาณ 2.5 เท่าสำหรับวงโคจรใกล้โลก (ด้วยรัศมี 6400 กม.) เนื่องจากกำลังสองของความเร็วสำหรับวงโคจรแบบวงกลมเป็นสัดส่วนผกผันกับรัศมีของมัน ความเร็วที่ลดลงเมื่อเทียบกับการโคจรของอวกาศครั้งแรกจึงทำได้โดยการเพิ่มรัศมีของวงโคจรมากกว่า 6 เท่า
ความยาวของวงโคจร
ความยาววงโคจรค้างฟ้า: . ด้วยรัศมีวงโคจร 42,164 กม. เราได้ความยาววงโคจร 264,924 กม. ความยาวของวงโคจรมีความสำคัญอย่างยิ่งในการคำนวณ "จุดสถานี" ของดาวเทียม
การรักษาดาวเทียมให้อยู่ในตำแหน่งวงโคจรในวงโคจร geostationary ดาวเทียมที่หมุนเวียนอยู่ในวงโคจร geostationary อยู่ภายใต้อิทธิพลของกองกำลัง (การก่อกวน) จำนวนหนึ่งที่เปลี่ยนพารามิเตอร์ของวงโคจรนี้ โดยเฉพาะอย่างยิ่ง การรบกวนดังกล่าวรวมถึงการรบกวนทางจันทรคติ - สุริยะ อิทธิพลของความไม่เท่าเทียมกันของสนามโน้มถ่วงของโลก ความรีของเส้นศูนย์สูตร เป็นต้น การเสื่อมสภาพของวงโคจรแสดงออกในปรากฏการณ์หลักสองประการ:
1) ดาวเทียมเคลื่อนที่ไปตามวงโคจรจากตำแหน่งโคจรเดิมไปยังจุดใดจุดหนึ่งจากสี่จุดสมดุลที่มั่นคง ซึ่งเรียกว่า "หลุมที่อาจเกิดขึ้นของวงโคจรค้างฟ้า" (ลองจิจูด 75.3°E, 104.7°W, 165.3°E) และ 14.7°W) เหนือเส้นศูนย์สูตรของโลก
2) ความเอียงของวงโคจรไปยังเส้นศูนย์สูตรเพิ่มขึ้น (จากค่าเริ่มต้น = 0) ในอัตราประมาณ 0.85 องศาต่อปีและถึงค่าสูงสุด 15 องศาใน 26.5 ปี
เพื่อชดเชยสิ่งรบกวนเหล่านี้และรักษาดาวเทียมไว้ที่ตำแหน่งที่กำหนด ดาวเทียมได้ติดตั้งระบบขับเคลื่อน (จรวดเคมีหรือไฟฟ้า) การเปิดเครื่องขับดันเป็นระยะ (แก้ไข "เหนือ-ใต้" เพื่อชดเชยความเอียงของวงโคจรและ "ตะวันตก-ตะวันออก" เพื่อชดเชยการล่องลอยไปตามวงโคจร) ทำให้ดาวเทียมอยู่ในตำแหน่งที่กำหนด การรวมดังกล่าวเกิดขึ้นหลายครั้งในหลายๆ (10-15) วัน เป็นสิ่งสำคัญที่การแก้ไขเหนือ-ใต้ต้องการการเพิ่มความเร็วของคุณลักษณะ (ประมาณ 45-50 ม./วินาทีต่อปี) ที่มากขึ้นกว่าการแก้ไขตามยาว (ประมาณ 2 ม./วินาทีต่อปี) เพื่อให้แน่ใจว่ามีการแก้ไขวงโคจรของดาวเทียมตลอดระยะเวลาการทำงาน (12-15 ปีสำหรับดาวเทียมโทรทัศน์สมัยใหม่) จำเป็นต้องมีการจัดหาเชื้อเพลิงจำนวนมากบนเรือ (หลายร้อยกิโลกรัม ในกรณีของเครื่องยนต์เคมี) เครื่องยนต์จรวดเคมีของดาวเทียมมีระบบจ่ายเชื้อเพลิงแบบดิสเพลสเมนต์ (จ่ายแก๊ส - ฮีเลียม) ทำงานบนส่วนประกอบที่มีจุดเดือดสูงในระยะยาว (โดยปกติคือไดเมทิลไฮดราซีนอสมมาตรและไนโตรเจนเตตรอกไซด์) ดาวเทียมจำนวนหนึ่งติดตั้งเครื่องพลาสม่า แรงขับของพวกมันน้อยกว่าแรงขับของสารเคมีอย่างมาก แต่ประสิทธิภาพที่มากขึ้นทำให้เป็นไปได้ (เนื่องจากการทำงานที่ยืดเยื้อ ซึ่งวัดเป็นสิบนาทีในการซ้อมรบครั้งเดียว) เพื่อลดมวลเชื้อเพลิงที่ต้องการบนเครื่องบินลงอย่างมาก การเลือกประเภทของระบบขับเคลื่อนจะพิจารณาจากคุณสมบัติทางเทคนิคเฉพาะของอุปกรณ์
หากจำเป็น ระบบจะใช้ระบบขับเคลื่อนเดียวกันเพื่อเคลื่อนดาวเทียมไปยังตำแหน่งวงโคจรอื่น ในบางกรณี โดยปกติเมื่อสิ้นสุดอายุการใช้งานของดาวเทียม เพื่อลดการสิ้นเปลืองน้ำมันเชื้อเพลิง การแก้ไขวงโคจรเหนือ-ใต้จะหยุด และเชื้อเพลิงที่เหลือจะใช้สำหรับการแก้ไขทิศตะวันตก - ตะวันออกเท่านั้น ความจุเชื้อเพลิงเป็นปัจจัยจำกัดหลักในอายุการใช้งานของดาวเทียมในวงโคจรค้างฟ้า
วางแผน:
- บทนำ
- 1 สถานี
- 2 ตำแหน่งของดาวเทียมในวงโคจร
- 3
การคำนวณพารามิเตอร์ของวงโคจรค้างฟ้า
- 3.1 รัศมีของวงโคจรและความสูงของวงโคจร
- 3.2 ความเร็วของวงโคจร
- 3.3 ความยาวของวงโคจร
- 4 การสื่อสาร หมายเหตุ
บทนำ
วงโคจรค้างฟ้า(GSO) - วงโคจรเป็นวงกลมที่อยู่เหนือเส้นศูนย์สูตรของโลก (ละติจูด 0 °) ซึ่งดาวเทียมเทียมโคจรรอบโลกด้วย ความเร็วเชิงมุมเท่ากับความเร็วเชิงมุมของการหมุนของโลกรอบแกนของมัน และอยู่เหนือจุดเดียวกันตลอดเวลา พื้นผิวโลก. วงโคจร geostationary เป็นรูปแบบหนึ่งของวงโคจร geosynchronous และใช้เพื่อวาง ดาวเทียมประดิษฐ์(การสื่อสาร การออกอากาศ ฯลฯ)
ดาวเทียมจะต้องหันไปในทิศทางของการหมุนของโลกที่ระดับความสูง 35,786 กม. เหนือระดับน้ำทะเล (ดูการคำนวณความสูงของ GSO ด้านล่าง) ความสูงนี้เองที่ทำให้ดาวเทียมมีช่วงเวลาของการปฏิวัติเท่ากับระยะเวลาการหมุนของโลกเมื่อเทียบกับดวงดาว (วันดาวฤกษ์: 23 ชั่วโมง 56 นาที 4.091 วินาที)
แนวคิดในการใช้ดาวเทียม geostationary เพื่อการสื่อสารนั้นแสดงโดย [ เมื่อไร?] K. E. Tsiolkovsky และนักทฤษฎีอวกาศชาวสโลวีเนีย German Potocnik ในปี 1928 ข้อดีของวงโคจร geostationary กลายเป็นที่รู้จักอย่างกว้างขวางหลังจากการตีพิมพ์บทความวิทยาศาสตร์ยอดนิยมโดย Arthur C. Clark ในวารสาร Wireless World ในปี 1945 ดังนั้นทางตะวันตก geostationary และบางครั้งเรียกว่าวงโคจร geosynchronous " วงโคจรของคลาร์ก", เอ " เข็มขัดคลาร์ก» เรียกบริเวณพื้นที่รอบนอกที่ระยะทาง 36,000 กม. เหนือระดับน้ำทะเลในระนาบเส้นศูนย์สูตรของโลกซึ่งพารามิเตอร์ของวงโคจรอยู่ใกล้กับ geostationary ดาวเทียมดวงแรกที่ปล่อยสู่ GSO ได้สำเร็จคือ ซินคอม-2เปิดตัวโดย NASA ในเดือนกรกฎาคม พ.ศ. 2506
1. จุดยืน
ดาวเทียมในวงโคจรค้างฟ้านั้นอยู่กับที่เมื่อเทียบกับพื้นผิวโลก ดังนั้นตำแหน่งในวงโคจรจึงเรียกว่าสถานี เป็นผลให้เสาอากาศแบบกำหนดทิศทางที่มุ่งเน้นไปที่ดาวเทียมและคงที่สามารถรักษาการเชื่อมต่อกับดาวเทียมนี้อย่างต่อเนื่องเป็นเวลานาน
2. ตำแหน่งของดาวเทียมในวงโคจร
สำหรับ Arkhangelsk ความสูงของดาวเทียมสูงสุดที่เป็นไปได้เหนือขอบฟ้าคือ 17.2 °
จุดสูงสุดของคลาร์กเบลท์อยู่ทางใต้เสมอ ที่ด้านล่างของกราฟ องศาคือเส้นเมอริเดียนที่ดาวเทียมตั้งอยู่
ด้านข้าง - ความสูงของดาวเทียมเหนือขอบฟ้า
ด้านบน - ทิศทางไปยังดาวเทียม เพื่อความชัดเจน คุณสามารถยืดในแนวนอนได้ 7.8 เท่า และสะท้อนจากซ้ายไปขวา แล้วจะมีลักษณะเหมือนบนท้องฟ้า
วงโคจรของ geostationary สามารถยึดได้อย่างแม่นยำบนวงกลมที่อยู่เหนือเส้นศูนย์สูตรเท่านั้น ด้วยระดับความสูงที่ใกล้เคียงกับ 35,786 กม.
หากมองเห็นดาวเทียมค้างฟ้าบนท้องฟ้าด้วยตาเปล่า เส้นที่มองเห็นได้จะตรงกับ "แถบคลาร์ก" สำหรับพื้นที่นี้ ดาวเทียม geostationary ต้องขอบคุณจุดยืนที่มีอยู่ทำให้สะดวกในการใช้งาน การสื่อสารผ่านดาวเทียม: เมื่อวางแนวแล้ว เสาอากาศจะชี้ไปที่ดาวเทียมที่เลือกเสมอ (เว้นแต่จะเปลี่ยนตำแหน่ง)
ในการถ่ายโอนดาวเทียมจากวงโคจรระดับความสูงต่ำไปยังวงโคจร geostationary จะใช้วงโคจรการถ่ายโอน geostationary (geotransitional) (GPO) - วงรีวงรีที่มี perigee ที่ระดับความสูงต่ำและจุดสุดยอดที่ระดับความสูงใกล้กับวงโคจรของ geostationary
หลังจากเสร็จสิ้นการใช้งานเชื้อเพลิงที่เหลืออยู่แล้ว ดาวเทียมจะต้องถูกย้ายไปยังวงโคจรการกำจัดซึ่งอยู่ห่างจาก GSO 200-300 กม.
3. การคำนวณพารามิเตอร์ของวงโคจรค้างฟ้า
3.1. รัศมีของวงโคจรและความสูงของวงโคจร
ในวงโคจรของ geostationary ดาวเทียมจะไม่เข้าใกล้โลกและไม่เคลื่อนออกจากมัน และนอกจากนี้ ในขณะที่หมุนไปพร้อมกับโลก ดาวเทียมจะตั้งอยู่เหนือจุดใดๆ บนเส้นศูนย์สูตรอย่างต่อเนื่อง ดังนั้นแรงโน้มถ่วงและแรงเหวี่ยงที่กระทำต่อดาวเทียมจะต้องสมดุลกัน ในการคำนวณความสูงของวงโคจร geostationary คุณสามารถใช้วิธีการของกลไกแบบคลาสสิกและดำเนินการจากสมการต่อไปนี้:
F ยู = F Γ ,ที่ไหน F ยู- แรงเฉื่อย และในกรณีนี้ แรงเหวี่ยง FΓ - แรงโน้มถ่วง ขนาดของแรงโน้มถ่วงที่กระทำต่อดาวเทียมสามารถกำหนดได้โดยกฎความโน้มถ่วงสากลของนิวตัน:
,ที่ไหน ม คคือมวลของดาวเทียม เอ็ม 3 - มวลของโลกเป็นกิโลกรัม จีคือค่าคงตัวโน้มถ่วงและ Rคือระยะทางเป็นเมตรจากดาวเทียมถึงศูนย์กลางของโลกหรือในกรณีนี้คือรัศมีของวงโคจร
ขนาดของแรงเหวี่ยงหนีศูนย์กลางคือ:
,ที่ไหน เอ- ความเร่งสู่ศูนย์กลางที่เกิดขึ้นระหว่างการเคลื่อนที่เป็นวงกลมในวงโคจร
อย่างที่คุณเห็นมวลของดาวเทียม ม คเป็นปัจจัยในการแสดงออกของแรงเหวี่ยงหนีศูนย์กลางและแรงโน้มถ่วง กล่าวคือ ความสูงของวงโคจรไม่ได้ขึ้นอยู่กับมวลของดาวเทียม ซึ่งเป็นจริงสำหรับวงโคจรใดๆ และเป็นผลมาจากความเท่าเทียมกันของ มวลแรงโน้มถ่วงและแรงเฉื่อย ดังนั้น วงโคจรของ geostationary ถูกกำหนดโดยความสูงที่แรงเหวี่ยงหนีศูนย์กลางจะเท่ากันในค่าสัมบูรณ์และตรงข้ามกับแรงโน้มถ่วงที่เกิดจากแรงดึงดูดของโลกที่ความสูงที่กำหนด
ความเร่งสู่ศูนย์กลางคือ:
,โดยที่ ω คือความเร็วเชิงมุมของดาวเทียม หน่วยเป็นเรเดียนต่อวินาที
มาทำให้คำชี้แจงที่สำคัญอย่างหนึ่ง อันที่จริง ความเร่งสู่ศูนย์กลางมี ความหมายทางกายภาพเฉพาะในกรอบอ้างอิงเฉื่อย ในขณะที่แรงเหวี่ยงหนีคือสิ่งที่เรียกว่าแรงจินตภาพและเกิดขึ้นเฉพาะในกรอบอ้างอิง (พิกัด) ที่เกี่ยวข้องกับวัตถุที่หมุนได้ แรงสู่ศูนย์กลาง (ในกรณีนี้คือแรงโน้มถ่วง) ทำให้เกิดความเร่งสู่ศูนย์กลาง โมดูโล (ตามค่าตัวเลขสัมบูรณ์) ความเร่งสู่ศูนย์กลางในกรอบอ้างอิงเฉื่อยเท่ากับแรงเหวี่ยงในกรอบอ้างอิงที่เชื่อมต่อในกรณีของเรากับดาวเทียม ดังนั้น เมื่อพิจารณาจากข้อสังเกตแล้ว เราจึงสามารถใช้คำว่า "ความเร่งสู่ศูนย์กลาง" ร่วมกับคำว่า "แรงเหวี่ยงหนีศูนย์กลาง" ได้
การปรับการแสดงออกของแรงโน้มถ่วงและแรงเหวี่ยงหนีศูนย์กลางด้วยการแทนที่ความเร่งสู่ศูนย์กลาง เราได้รับ:
.ลด ม ค, กำลังแปล R 2 ทางซ้าย และ ω 2 ทางขวา เราได้:
.คุณสามารถเขียนนิพจน์นี้แตกต่างออกไป โดยแทนที่ด้วย μ - ค่าคงที่ความโน้มถ่วงตามพิกัดตำแหน่งทางภูมิศาสตร์:
ความเร็วเชิงมุม ω คำนวณโดยการหารมุมที่เคลื่อนที่ในหนึ่งรอบ (เรเดียน) ด้วยคาบของการปฏิวัติ เราได้รับ:
rad/sรัศมีการโคจรที่เกิดขึ้นคือ 42,164 กม. การลบรัศมีเส้นศูนย์สูตรของโลกคือ 6,378 กม. ทำให้เราสูง 35,786 กม.
3.2. ความเร็วของวงโคจร
ความเร็วของวงโคจร (ความเร็วที่ดาวเทียมบินในอวกาศ) คำนวณโดยการคูณความเร็วเชิงมุมด้วยรัศมีของวงโคจร:
กม./วินาทีหรือ = 11052 กม./ชมคุณสามารถทำการคำนวณด้วยวิธีอื่น ความสูงของวงโคจรค้างฟ้าคือระยะห่างจากศูนย์กลางของโลกที่ความเร็วเชิงมุมของดาวเทียมซึ่งประจวบกับความเร็วเชิงมุมของการหมุนของโลก ทำให้เกิดความเร็วของวงโคจร (เชิงเส้น) เท่ากับความเร็วของอวกาศแรก (เพื่อให้แน่ใจว่า โคจรเป็นวงกลม) ที่ระดับความสูงที่กำหนด การแก้สมการง่าย ๆ นี้ แน่นอน เราได้รับค่าเดียวกับในการคำนวณด้วยแรงเหวี่ยงหนีศูนย์กลาง เป็นที่ชัดเจนว่าเหตุใดวงโคจรของ geostationary จึงสูงมาก จำเป็นต้องเคลื่อนดาวเทียมออกจากโลกให้ไกลเพียงพอสำหรับความเร็วของอวกาศแรกที่มีขนาดเล็กมาก (ประมาณ 3 กม./วินาที, cf. ประมาณ 8 กม./วินาทีในวงโคจรต่ำ)
สิ่งสำคัญที่ควรทราบก็คือวงโคจรของ geostationary จะต้องเป็นวงกลมพอดี (และด้วยเหตุนี้มันจึงเป็นความเร็วจักรวาลแรกที่กล่าวไว้ข้างต้น) หากความเร็วต่ำกว่าความเร็วของอวกาศแรก (ที่ระยะทางที่กำหนดจากโลก) ดาวเทียมจะลดลงหากความเร็วสูงกว่าความเร็วของอวกาศครั้งแรก วงโคจรจะเป็นวงรีและดาวเทียมจะไม่เป็น สามารถหมุนไปพร้อมกับโลกได้อย่างสม่ำเสมอ
3.3. ความยาวของวงโคจร
ความยาววงโคจรค้างฟ้า: . ด้วยรัศมีวงโคจร 42,164 กม. เราได้ความยาววงโคจร 264,924 กม.
ความยาวของวงโคจรมีความสำคัญอย่างยิ่งในการคำนวณ "จุดสถานี" ของดาวเทียม
4. การสื่อสาร
การสื่อสารผ่านดาวเทียมดังกล่าวมีความล่าช้าอย่างมากในการแพร่กระจายสัญญาณ แม้แต่ลำแสงเดียวก็เคลื่อนไปที่ดาวเทียมและกลับมีค่าใช้จ่ายเกือบหนึ่งในสี่ของวินาที ปิงไปยังจุดอื่นบนโลกจะใช้เวลาประมาณครึ่งวินาที
ด้วยความสูงของวงโคจร 35,786 กม. และความเร็วแสงประมาณ 300,000 กม./วินาที เส้นทางลำแสง Earth-Satellite ต้องการ 35786/300000 =~0.12 วินาที เส้นทางลำแสง "Earth (เครื่องส่งสัญญาณ) -> ดาวเทียม -> Earth (เครื่องรับ)" ~ 0.24 วินาที Ping จะใช้เวลา ~0.48 วินาที
โดยคำนึงถึงความล่าช้าของสัญญาณในอุปกรณ์ดาวเทียมและอุปกรณ์บริการภาคพื้นดิน ความล่าช้าของสัญญาณทั้งหมดบนเส้นทาง Earth -> satellite -> Earth สามารถเข้าถึงได้ 2-4 วินาที
การดูแลรักษาดาวเทียม ณ จุดที่ยืนอยู่ในวงโคจรของ geostationary นั้นต้องการพลังงานและค่าใช้จ่ายทางการเงินด้วย นี่เป็นเพราะความจริงที่ว่าวงโคจรจะต้องเป็นวงกลมอย่างเคร่งครัด มีความสูงที่กำหนดไว้อย่างเคร่งครัด และมีลักษณะเฉพาะด้วยความเร็วที่กำหนดไว้อย่างเคร่งครัด (พารามิเตอร์ทั้งสามจะเชื่อมต่อถึงกัน) ดังนั้นดาวเทียม geostationary จึงใช้เชื้อเพลิงที่มีอยู่อย่างรวดเร็วเพื่อแก้ไขความเร็วและความสูงของวงโคจร นั่นคือเหตุผลที่ในปัจจุบันพวกเขาส่วนใหญ่ไม่ใช้ดาวเทียม "ห้อย" แต่ "แปด" ดาวเทียมที่อยู่ในวงโคจร geosynchronous ซึ่งอาจต่ำกว่า geostationary มาก นอกจากนี้ ดาวเทียม “แฝด” สองดวงในวงโคจรวงรีตรงข้ามซึ่งทำมุมกับระนาบเส้นศูนย์สูตรนั้นถูกกว่ามากในการใช้งานเมื่อเทียบกับดาวเทียมค้างฟ้าหนึ่งดวง
อย่างไรก็ตาม ดาวเทียม geostationary ยังคงมีความจำเป็นสำหรับวัตถุประสงค์ด้านข่าวกรองทางทหารหลายประการ เช่นเดียวกับวัตถุประสงค์ที่เรียกว่าการกำหนดเป้าหมายในอวกาศ ซึ่งก็คือสำหรับการปรับทิศทางยานอวกาศเมื่อเข้าสู่วงโคจรและเมื่อเคลื่อนที่จากวงโคจรไปยังวงโคจร นอกจากนี้ในอนาคตเป็นดาวเทียมค้างฟ้าที่สามารถรับประกันการทำงานของลิฟต์อวกาศที่เรียกว่า
บทคัดย่อนี้อ้างอิงจากบทความจาก Wikipedia ของรัสเซีย ซิงโครไนซ์เสร็จสิ้นเมื่อ 07/09/11 23:38:18
บทคัดย่อที่คล้ายกัน: กล้วยค้างฟ้าเหนือเท็กซัส, สปุตนิก (RN), แพน (ดาวเทียม), แมบ (ดาวเทียม), ไอโอ (ดาวเทียม), ซียา (ดาวเทียม), โซยา (ดาวเทียม), สปุตนิก-3, สปุตนิก-5
บทที่ 3
วงโคจรของดาวเทียมโลกเทียม ดาวเทียมเข้าสู่วงโคจร
เส้นทางโคจรของดาวเทียมเรียกว่าวงโคจร ในระหว่างการบินโดยเสรีของดาวเทียม เมื่อดับเครื่องยนต์ไอพ่นบนเครื่องบิน การเคลื่อนที่จะเกิดขึ้นภายใต้อิทธิพลของแรงโน้มถ่วงและความเฉื่อย และแรงหลักคือแรงดึงดูดของโลก
หากเราถือว่าโลกเป็นทรงกลมอย่างเคร่งครัด และการกระทำของสนามโน้มถ่วงของโลกเป็นแรงเดียวที่กระทำต่อดาวเทียม ดังนั้นการเคลื่อนที่ของดาวเทียมเทียมจะเป็นไปตามกฎของเคปเลอร์ที่ทราบกันดีอยู่แล้ว: มันเกิดขึ้นในสภาวะคงที่ (แน่นอน) พื้นที่) เครื่องบินผ่านศูนย์กลางของโลก - ระนาบของวงโคจร; วงโคจรมีรูปร่างเป็นวงรี (รูปที่ 3.1) หรือวงกลม (กรณีพิเศษของวงรี)
เมื่อดาวเทียมเคลื่อนที่ พลังงานกลทั้งหมด (จลนพลศาสตร์และศักย์) ยังคงไม่เปลี่ยนแปลง อันเป็นผลมาจากการที่ดาวเทียมเคลื่อนออกจากพื้นโลก ความเร็วของการเคลื่อนที่จะลดลง
สมการวงโคจรวงรีของดาวเทียม Earth ในระบบพิกัดเชิงขั้วถูกกำหนดโดยสูตร
ในกรณีของวงโคจรวงรี จุด perigee คือจุดของวงโคจรที่สอดคล้องกับค่าที่น้อยที่สุดของเวกเตอร์รัศมี r \u003d rp จุดสุดยอดคือจุดที่สอดคล้องกับค่าที่ใหญ่ที่สุด r \u003d ra (รูปที่ 3.2 ).
โลกอยู่ที่จุดโฟกัสจุดหนึ่งของวงรี ปริมาณที่รวมอยู่ในสูตร (3.1) สัมพันธ์กันโดยความสัมพันธ์:
ระยะห่างระหว่างจุดโฟกัสกับจุดศูนย์กลางของวงรีคือ ae นั่นคือสัดส่วนกับความเยื้องศูนย์ ความสูงของดาวเทียมเหนือพื้นผิวโลก
ที่ไหน ร-รัศมีของโลก เส้นตัดของระนาบของวงโคจรกับระนาบของเส้นศูนย์สูตร (a - a ในรูปที่ 3.1) เรียกว่าเส้นของโหนด มุม i ระหว่างระนาบของวงโคจรกับระนาบของเส้นศูนย์สูตรคือความเอียง ของวงโคจร โดยความโน้มเอียง เส้นศูนย์สูตร (i = 0°), ขั้ว (i = 90°) และโคจรเอียงมีความโดดเด่น (0°
วงโคจรของดาวเทียมยังโดดเด่นด้วยลองจิจูดของจุดสุดยอด d - ลองจิจูดของจุดดาวเทียมย่อย (จุดตัดของเวกเตอร์รัศมีกับพื้นผิวโลก) ในขณะที่ดาวเทียมผ่านจุดสุดยอดและช่วงเวลาของการปฏิวัติ T (เวลาระหว่างสองตอนต่อเนื่องกันของจุดเดียวกันของวงโคจร)
ระบบการสื่อสารและการออกอากาศต้องมีเส้นสายตาระหว่างดาวเทียมกับสถานีภาคพื้นดินที่เกี่ยวข้องเป็นระยะเวลาที่เพียงพอ หากเซสชั่นไม่ตลอด 24 ชั่วโมงจะสะดวกที่จะทำซ้ำทุกวันในเวลาเดียวกัน ดังนั้น ขอแนะนำให้ใช้วงโคจรแบบซิงโครนัสที่มีคาบของการปฏิวัติเท่ากับหรือหลายเท่าของเวลาที่โลกหมุนรอบแกน นั่นคือ วันดาวฤกษ์ (23 ชั่วโมง 56 นาที 4 วินาที)
มีการใช้วงโคจรรูปไข่สูงที่มีระยะเวลาการปฏิวัติ 12 ชั่วโมงเมื่อใช้ดาวเทียม Molniya สำหรับการสื่อสารและระบบแขวน (ความสูงของ perigee คือ 500 กม. จุดสุดยอดคือ 40,000 กม.) การเคลื่อนที่ของดาวเทียมที่ระดับความสูง - ในภูมิภาคสุดยอด - ช้าลงและภูมิภาคเพอริจีซึ่งอยู่เหนือซีกโลกใต้ของโลกดาวเทียมผ่านเร็วมาก เขตทัศนวิสัยของดาวเทียมในวงโคจรของประเภท Molniya มีขนาดใหญ่ในช่วงวงโคจรส่วนใหญ่เนื่องจากระดับความสูงที่สำคัญ ตั้งอยู่ในซีกโลกเหนือและสะดวกสำหรับประเทศทางตอนเหนือ การให้บริการพื้นที่ทั้งหมดของอดีตสหภาพโซเวียตโดยดาวเทียมดวงใดดวงหนึ่งเป็นไปได้อย่างน้อย 8 ชั่วโมงดังนั้นดาวเทียมสามดวงที่แทนที่กันและกันก็เพียงพอสำหรับการทำงานตลอด 24 ชั่วโมง ในปัจจุบัน เพื่อขจัดความขัดข้องในการสื่อสารและการออกอากาศ ทำให้ระบบสำหรับเสาอากาศชี้ของสถานีภาคพื้นดินไปยังดาวเทียมและข้อได้เปรียบในการปฏิบัติงานอื่นๆ ง่ายขึ้น จึงได้มีการเปลี่ยนมาใช้วงโคจร geostationary orbits (GSO) ของดาวเทียม Earth
วงโคจรของดาวเทียมค้างฟ้าเป็นวงกลม (ความเยื้องศูนย์กลาง e = 0) เส้นศูนย์สูตร (ความเอียง i = 0°) วงโคจรแบบซิงโครนัสด้วยระยะเวลาการปฏิวัติ 24 ชั่วโมง โดยการเคลื่อนที่ของดาวเทียมไปทางทิศตะวันออก
ย้อนกลับไปในปี พ.ศ. 2488 วงโคจรของ GSO ได้รับการคำนวณและเสนอให้ใช้สำหรับดาวเทียมสื่อสารโดยวิศวกรชาวอังกฤษ อาร์เธอร์ คลาร์ก ซึ่งต่อมาเป็นที่รู้จักในนามนักเขียนนิยายวิทยาศาสตร์ ในอังกฤษและอีกหลายประเทศ วงโคจรค้างฟ้าเรียกว่า "Clark Belt" (รูปที่ 3.3)
วงโคจรมีรูปร่างเป็นวงกลมอยู่ในระนาบของเส้นศูนย์สูตรของโลกโดยมีความสูงเหนือพื้นผิวโลก 35,786 กม. ทิศทางการหมุนของดาวเทียมสอดคล้องกับทิศทางการหมุนของโลกในแต่ละวัน ดังนั้น สำหรับผู้สังเกตการณ์ทางโลก ดาวเทียมดูเหมือนจะหยุดนิ่ง ณ จุดหนึ่งในซีเลสเชียลซีเลสเชียล
วงโคจรของ geostationary นั้นมีความพิเศษตรงที่ว่าไม่มีพารามิเตอร์อื่นใดที่สามารถบรรลุความไม่สามารถเคลื่อนที่ของดาวเทียมที่เคลื่อนที่ได้อย่างอิสระเมื่อเทียบกับผู้สังเกตการณ์บนโลก จำเป็นต้องสังเกตข้อดีบางประการของดาวเทียมค้างฟ้า การสื่อสารดำเนินไปอย่างต่อเนื่องตลอด 24 ชั่วโมงโดยไม่มีการเปลี่ยนผ่าน (ดาวเทียมขาเข้าไปยังอีกดวงหนึ่ง)
บนเสาอากาศของสถานีภาคพื้นดินระบบการติดตามอัตโนมัติของดาวเทียมเทียมนั้นง่ายขึ้นและบางระบบก็ไม่รวมอยู่ด้วย
กลไกของไดรฟ์ (การเคลื่อนไหว) ของเสาอากาศส่งและรับนั้นเบาลงง่ายขึ้นทำให้ประหยัดมากขึ้น ได้รับค่าการลดทอนสัญญาณที่เสถียรมากขึ้นบนเส้นทาง Earth-Space แล้ว พื้นที่การมองเห็นของดาวเทียมค้างฟ้าอยู่ที่ประมาณหนึ่งในสามของพื้นผิวโลก ดาวเทียมค้างฟ้าสามดวงก็เพียงพอที่จะสร้างระบบการสื่อสารระดับโลก ไม่มีการเปลี่ยนแปลงความถี่ (หรือมีขนาดเล็กมาก) เนื่องจากผลกระทบของ Doppler
ปรากฏการณ์ดอปเปลอร์เรียกว่าปรากฏการณ์ทางกายภาพ ซึ่งประกอบด้วยการเปลี่ยนความถี่ของการสั่นของคลื่นแม่เหล็กไฟฟ้าความถี่สูงระหว่างการเคลื่อนไหวร่วมกันของตัวส่งและตัวรับ เอฟเฟกต์ดอปเปลอร์อธิบายได้ด้วยการเปลี่ยนแปลง
ระยะทางเมื่อเวลาผ่านไป ผลกระทบนี้สามารถเกิดขึ้นได้ระหว่างการเคลื่อนที่ของดาวเทียมในวงโคจร บนสายการสื่อสารผ่านดาวเทียมขณะตั้งครรภ์อย่างเคร่งครัด การเปลี่ยนแปลง Doppler จะไม่เกิดขึ้น บนดาวเทียม geostationary จริงนั้นไม่มีนัยสำคัญ และในวงโคจรวงรีที่ยาวหรือกลมต่ำก็อาจมีนัยสำคัญ ผลกระทบปรากฏว่าเป็นความไม่แน่นอนของความถี่พาหะของการสั่นที่ถ่ายทอดโดยดาวเทียมซึ่งถูกเพิ่มเข้าไปในความไม่แน่นอนของความถี่ฮาร์ดแวร์ที่เกิดขึ้นในอุปกรณ์ของทวนสัญญาณออนบอร์ดและสถานีภาคพื้นดิน ความไม่เสถียรนี้อาจทำให้การรับสัญญาณซับซ้อนขึ้นอย่างมาก ทำให้ภูมิคุ้มกันเสียงของการรับสัญญาณลดลง
น่าเสียดายที่เอฟเฟกต์ดอปเปลอร์มีส่วนทำให้เกิดการเปลี่ยนแปลงในความถี่ของการมอดูเลตออสซิลเลชัน การบีบอัด (หรือการแพร่กระจาย) ของสเปกตรัมของสัญญาณที่ส่งไม่สามารถควบคุมได้ด้วยวิธีการของฮาร์ดแวร์ ดังนั้นหากการชดเชยความถี่เกินขีดจำกัดที่ยอมรับได้ (เช่น 2 Hz สำหรับอุปกรณ์แบ่งความถี่บางประเภท) ช่องสัญญาณจะไม่เป็นที่ยอมรับ
ความล่าช้าของสัญญาณวิทยุระหว่างการแพร่กระจายไปตามเส้น Earth - AES - Earth ก็มีผลอย่างมากต่อคุณสมบัติของช่องสัญญาณสื่อสาร
เมื่อส่งข้อความแบบซิมเพล็กซ์ (ทิศทางเดียว) (รายการโทรทัศน์ การกระจายเสียง และข้อความที่ไม่ต่อเนื่อง (ไม่ต่อเนื่อง) ผู้บริโภคจะไม่รู้สึกถึงความล่าช้านี้ อย่างไรก็ตาม ด้วยการสื่อสารแบบสองทาง (สองทาง) ความล่าช้าหลายวินาทีจึงสังเกตได้ชัดเจนอยู่แล้ว ตัวอย่างเช่น คลื่นแม่เหล็กไฟฟ้าจากโลกสู่ GSO และย้อนกลับ "เดินทาง" 2 ... 4 วินาที (โดยคำนึงถึงความล่าช้าของสัญญาณในอุปกรณ์ดาวเทียม) และอุปกรณ์ภาคพื้นดิน ในกรณีนี้ จึงไม่สมเหตุสมผลที่จะส่งสัญญาณที่แม่นยำ สัญญาณเวลา
การปล่อยดาวเทียมค้างฟ้าสู่วงโคจรมักจะดำเนินการโดยจรวดหลายขั้นตอนผ่านวงโคจรระดับกลาง ยานพาหนะเปิดตัวที่ทันสมัยเป็นยานอวกาศที่ซับซ้อนซึ่งขับเคลื่อนด้วยพลังไอพ่นของเครื่องยนต์จรวด
องค์ประกอบของยานเปิดตัวประกอบด้วยจรวดและส่วนหัว บล็อกจรวดเป็นส่วนอิสระของจรวดคอมโพสิตที่มีช่องเชื้อเพลิง ระบบขับเคลื่อน และองค์ประกอบของระบบแยกระยะ ส่วนหัวประกอบด้วยน้ำหนักบรรทุกและแฟริ่งที่ปกป้องโครงสร้างดาวเทียมจากพลังงานและผลกระทบจากความร้อนของการไหลของอากาศที่จะเกิดขึ้นระหว่างการบินในบรรยากาศและทำหน้าที่สำหรับติดตั้งบนองค์ประกอบพื้นผิวด้านในที่เกี่ยวข้องกับการเตรียมการสำหรับการปล่อยตัว แต่ไม่ ทำหน้าที่ในการบิน แฟริ่งหลักทำให้การออกแบบดาวเทียมสว่างขึ้นและเป็นองค์ประกอบแบบพาสซีฟ ความจำเป็นที่จะหายไปหลังจากที่ยานปล่อยตัวออกจากชั้นบรรยากาศที่หนาแน่นซึ่งตกลงมา น้ำหนักบรรทุกของยานอวกาศประกอบด้วยอุปกรณ์สื่อสารและการแพร่ภาพกระจายเสียง ระบบวิทยุโทรเลข ตัวดาวเทียมเองพร้อมระบบเสริมและสนับสนุนทั้งหมด
หลักการทำงานของรถปล่อยหลายขั้นตอนแบบใช้แล้วทิ้งมีดังนี้: ในขณะที่ระยะแรกกำลังทำงานอยู่ ส่วนที่เหลือร่วมกับน้ำหนักบรรทุกจริงจะถือเป็นน้ำหนักบรรทุกของระยะแรก หลังจากแยกจากกัน อันที่สองเริ่มทำงาน ซึ่งเมื่อรวมกับระยะต่อมาและน้ำหนักบรรทุกจริง จะสร้างจรวดอิสระใหม่ สำหรับระยะที่สอง ระยะที่ตามมาทั้งหมด (ถ้ามี) ร่วมกับน้ำหนักบรรทุกจริง เล่นบทบาทของน้ำหนักบรรทุก และอื่นๆ กล่าวคือ การบินมีลักษณะเป็นหลายขั้นตอน ซึ่งแต่ละขั้นก็เหมือนกับที่เคยเป็น ขั้นตอนสำหรับการสื่อสารความเร็วเริ่มต้นกับจรวดแบบขั้นตอนเดียวอื่น ๆ ที่รวมอยู่ในองค์ประกอบ ในกรณีนี้ ความเร็วเริ่มต้นของจรวดขั้นเดียวที่ตามมาแต่ละอันจะเท่ากับความเร็วสุดท้ายของจรวดก่อนหน้า การปฏิเสธของขั้นตอนแรกและขั้นตอนต่อมาของผู้ให้บริการจะดำเนินการหลังจากที่เชื้อเพลิงหมดไฟในระบบขับเคลื่อน
เส้นทางที่ยานยิงใช้เมื่อปล่อยดาวเทียมเทียมขึ้นสู่วงโคจรเรียกว่าเส้นทางการบิน เป็นลักษณะเฉพาะของพื้นที่ใช้งานและแบบพาสซีฟ ระยะแอคทีฟของการบินคือการบินของสเตจของยานยิงจรวดโดยที่เครื่องยนต์กำลังทำงาน เฟสแบบพาสซีฟคือการบินของหน่วยจรวดที่ใช้แล้วหลังจากแยกออกจากยานเปิดตัว
สายการบินเริ่มต้นในแนวตั้ง (ส่วนที่ 1 อยู่ที่ระดับความสูง 185 ... 250 กม.) จากนั้นออกสู่โค้ง
แอคทีฟไซต์ 2 ในทิศทางตะวันออก ในส่วนนี้ ขั้นตอนแรกจะค่อยๆ ลดมุมเอียงของแกนตามขอบฟ้าในพื้นที่ ส่วนที่ 3, 4 - ส่วนที่ใช้งานของเที่ยวบินของขั้นตอนที่สองและสามตามลำดับ 5 - วงโคจรของดาวเทียม, 6, 7 - ส่วนที่ไม่โต้ตอบของเที่ยวบินของบล็อกจรวดของด่านแรกและด่านที่สอง (รูปที่ 3.4)
เมื่อปล่อยดาวเทียมขึ้นสู่วงโคจรที่เหมาะสม เวลาและสถานที่ที่ปล่อยยานยิงจรวดจะมีบทบาทสำคัญ มีการคำนวณมาแล้วว่าจะเป็นประโยชน์มากกว่าที่จะระบุตำแหน่งของคอสโมโดรมใกล้กับเส้นศูนย์สูตรมากที่สุด เนื่องจากเมื่อเร่งความเร็วในทิศทางตะวันออก ยานเกราะที่ปล่อยจะได้รับความเร็วเพิ่มขึ้น ความเร็วนี้เรียกว่าความเร็วรอบวงของคอสโมโดรม Vk นั่นคือความเร็วของการเคลื่อนที่รอบแกนโลกเนื่องจากการหมุนเวียนของดาวเคราะห์ทุกวัน
นั่นคือ ที่เส้นศูนย์สูตรคือ 465 m/s และที่ละติจูดของ Baikonur cosmodrome - 316 m/s ในทางปฏิบัติ นี่หมายความว่าสามารถปล่อยดาวเทียมที่หนักกว่าได้จากยานยิงเดียวกันจากเส้นศูนย์สูตร
ขั้นตอนสุดท้ายของการบินของยานยิงคือการปล่อยดาวเทียมขึ้นสู่วงโคจร ซึ่งรูปร่างกำหนดโดยพลังงานจลน์ที่ดาวเทียมส่งมาจากจรวด กล่าวคือ ความเร็วสุดท้ายของเรือบรรทุก ในกรณีที่ดาวเทียมได้รับพลังงานเพียงพอที่จะส่งไปยัง GEO ยานที่ส่งจะต้องนำดาวเทียมไปยังจุดที่อยู่ห่างจากโลก 35,875 กม. และในขณะเดียวกันก็แจ้งด้วยความเร็ว 3075 ม./ ส.
คำนวณความเร็วของวงโคจรของดาวเทียม geostationary ได้ง่าย ความสูงของ GSO เหนือพื้นผิวโลกคือ 35,786 กม. รัศมีของ GSO นั้นใหญ่กว่า 6,366 กม. (รัศมีเฉลี่ยของโลก) เช่น 42,241 กม. คูณค่ารัศมี GSO ด้วย 2l (6.28) เราได้เส้นรอบวง - 265,409 กม. หากเราหารมันด้วยระยะเวลาของวันในหน่วยวินาที (86,400 s) เราจะได้ความเร็ววงโคจรของดาวเทียม - เฉลี่ย 3.075 km/s หรือ 3075 m/s
โดยปกติ การปล่อยดาวเทียมโดยยานยิงจรวดจะดำเนินการในสี่ขั้นตอน: การเข้าสู่วงโคจรเริ่มต้น เข้าสู่วงโคจร "รอ" (วงโคจรที่จอดรถ); เข้าสู่วงโคจรการถ่ายโอน ออกสู่วงโคจรสุดท้าย (รูปที่ 3.5) ตัวเลขสอดคล้องกับขั้นตอนต่อไปนี้ของการส่งดาวเทียมเข้าสู่ GSO: 1 - วงโคจรการถ่ายโอนเริ่มต้น; 2 - ก่อน
เปิดเอ็นจิ้น apogee เพื่อเข้าสู่วงโคจรการถ่ายโอนระดับกลาง 3 - กำหนดตำแหน่งในวงโคจร;
4 - การรวมครั้งที่สองของเอ็นจิ้นสุดยอดเพื่อเข้าสู่วงโคจรดริฟท์เริ่มต้น 5 - การปรับแนวระนาบการโคจรใหม่และการแก้ไขข้อผิดพลาด 6 - การวางแนวตั้งฉากกับระนาบของวงโคจรและการแก้ไขข้อผิดพลาด 7-
หยุดแพลตฟอร์มดาวเทียม, เปิดแผง, ปลดจรวดอย่างสมบูรณ์; 8 - การเปิดเผยเสาอากาศ, การรวมไจโรสเตบิไลเซอร์; 9 - การรักษาเสถียรภาพตำแหน่ง: การวางแนวของเสาอากาศไปยังจุดที่ต้องการบนโลก, การวางแนวของแผงโซลาร์เซลล์ไปยังดวงอาทิตย์, เปิดเครื่องทวนสัญญาณออนบอร์ดและตั้งค่าโหมดการทำงานเล็กน้อย
: 23 ชั่วโมง 56 นาที 4.091 วินาที)
แนวคิดของการใช้ดาวเทียม geostationary เพื่อวัตถุประสงค์ในการสื่อสารนั้นแสดงโดย Herman Potočnik นักทฤษฎีจักรวาลวิทยาสโลวีเนียในปี 1928
ข้อดีของวงโคจร geostationary กลายเป็นที่รู้จักอย่างกว้างขวางหลังจากการตีพิมพ์บทความวิทยาศาสตร์ยอดนิยมของ Arthur Clark ในนิตยสาร Wireless World ในปี 1945 ดังนั้นทางตะวันตกบางครั้ง geostationary และ geosynchronous orbits จึงถูกเรียกว่า " วงโคจรของคลาร์ก", เอ " เข็มขัดคลาร์ก» เรียกบริเวณพื้นที่รอบนอกที่ระยะทาง 36,000 กม. เหนือระดับน้ำทะเลในระนาบเส้นศูนย์สูตรของโลกซึ่งพารามิเตอร์ของวงโคจรอยู่ใกล้กับ geostationary ดาวเทียมดวงแรกที่ปล่อยสู่ GSO ได้สำเร็จคือ ซินคอม-3ซึ่งเปิดตัวโดย NASA ในเดือนสิงหาคม 2507
สารานุกรม YouTube
-
1 / 5
วงโคจรของ geostationary สามารถยึดได้อย่างแม่นยำบนวงกลมที่อยู่เหนือเส้นศูนย์สูตรเท่านั้น ด้วยระดับความสูงที่ใกล้เคียงกับ 35,786 กม.
หากมองเห็นดาวเทียมค้างฟ้าบนท้องฟ้าด้วยตาเปล่า เส้นที่มองเห็นได้จะตรงกับ "แถบคลาร์ก" สำหรับพื้นที่นี้ ดาวเทียม geostationary ต้องขอบคุณจุดยืนที่มีอยู่ ทำให้สะดวกในการใช้สำหรับการสื่อสารผ่านดาวเทียม: เมื่อปรับทิศทางแล้ว เสาอากาศจะถูกส่งไปยังดาวเทียมที่เลือกเสมอ (หากไม่เปลี่ยนตำแหน่ง)
ในการถ่ายโอนดาวเทียมจากวงโคจรระดับความสูงต่ำไปยังวงโคจร geostationary จะใช้วงโคจรการถ่ายโอน geostationary (geotransitional) (GPO) - วงรีวงรีที่มี perigee ที่ระดับความสูงต่ำและจุดสุดยอดที่ระดับความสูงใกล้กับวงโคจรของ geostationary
หลังจากเสร็จสิ้นการใช้งานเชื้อเพลิงที่เหลืออยู่แล้ว ดาวเทียมจะต้องถูกย้ายไปยังวงโคจรการกำจัดซึ่งอยู่ห่างจาก GSO 200-300 กม.
การคำนวณพารามิเตอร์ของวงโคจรค้างฟ้า
รัศมีของวงโคจรและความสูงของวงโคจร
ในวงโคจรของ geostationary ดาวเทียมจะไม่เข้าใกล้โลกและไม่เคลื่อนออกจากมัน และนอกจากนี้ ในขณะที่หมุนไปพร้อมกับโลก ดาวเทียมจะตั้งอยู่เหนือจุดใดๆ บนเส้นศูนย์สูตรอย่างต่อเนื่อง ดังนั้นแรงโน้มถ่วงและแรงเหวี่ยงที่กระทำต่อดาวเทียมจะต้องสมดุลกัน ในการคำนวณความสูงของวงโคจร geostationary เราสามารถใช้วิธีการของกลไกแบบคลาสสิก และเมื่อเปลี่ยนไปใช้กรอบอ้างอิงดาวเทียมแล้ว ให้ดำเนินการจากสมการต่อไปนี้:
F u = F Γ (\displaystyle F_(u)=F_(\Gamma )),ที่ไหน F u (\displaystyle F_(u))- แรงเฉื่อย และในกรณีนี้ แรงเหวี่ยง F Γ (\displaystyle F_(\Gamma ))- แรงโน้มถ่วง. ขนาดของแรงโน้มถ่วงที่กระทำต่อดาวเทียมสามารถกำหนดได้จากกฎความโน้มถ่วงสากลของนิวตัน:
F Γ = G ⋅ M 3 ⋅ m c R 2 (\displaystyle F_(\Gamma )=G\cdot (\frac (M_(3)\cdot m_(c))(R^(2)))),มวลของดาวเทียมอยู่ที่ไหน M 3 (\displaystyle M_(3))คือมวลของโลกเป็นกิโลกรัม G (\displaystyle G)คือค่าคงตัวโน้มถ่วงและ R (\displaystyle R)คือระยะทางเป็นเมตรจากดาวเทียมถึงศูนย์กลางของโลกหรือในกรณีนี้คือรัศมีของวงโคจร
ขนาดของแรงเหวี่ยงหนีศูนย์กลางคือ:
F u = m c ⋅ a (\displaystyle F_(u)=m_(c)\cdot a),ที่ไหน a (\displaystyle a)- ความเร่งสู่ศูนย์กลางที่เกิดขึ้นระหว่างการเคลื่อนที่เป็นวงกลมในวงโคจร
อย่างที่คุณเห็นมวลของดาวเทียม m c (\displaystyle m_(c))เป็นปัจจัยในการแสดงออกของแรงเหวี่ยงหนีศูนย์กลางและแรงโน้มถ่วง กล่าวคือ ความสูงของวงโคจรไม่ได้ขึ้นอยู่กับมวลของดาวเทียม ซึ่งเป็นจริงสำหรับวงโคจรใดๆ และเป็นผลมาจากความเท่าเทียมกันของ มวลแรงโน้มถ่วงและแรงเฉื่อย ดังนั้น วงโคจรของ geostationary ถูกกำหนดโดยความสูงที่แรงเหวี่ยงหนีศูนย์กลางจะเท่ากันในค่าสัมบูรณ์และตรงข้ามกับแรงโน้มถ่วงที่เกิดจากแรงดึงดูดของโลกที่ความสูงที่กำหนด
ความเร่งสู่ศูนย์กลางคือ:
a = ω 2 ⋅ R (\displaystyle a=\omega ^(2)\cdot R),ความเร็วเชิงมุมของดาวเทียมอยู่ที่ไหนในหน่วยเรเดียนต่อวินาที
มาทำให้คำชี้แจงที่สำคัญอย่างหนึ่ง อันที่จริง ความเร่งสู่ศูนย์กลางมีความหมายทางกายภาพเฉพาะในกรอบอ้างอิงเฉื่อย ในขณะที่แรงเหวี่ยงหนีศูนย์กลางคือสิ่งที่เรียกว่าแรงจินตภาพและเกิดขึ้นเฉพาะในกรอบอ้างอิง (พิกัด) ที่เกี่ยวข้องกับวัตถุที่กำลังหมุน แรงสู่ศูนย์กลาง (ในกรณีนี้คือแรงโน้มถ่วง) ทำให้เกิดความเร่งสู่ศูนย์กลาง ค่าสัมบูรณ์ของการเร่งสู่ศูนย์กลางในกรอบอ้างอิงเฉื่อยเท่ากับแรงเหวี่ยงในกรอบอ้างอิงที่เกี่ยวข้องกับกรณีของเรากับดาวเทียม ดังนั้น เมื่อพิจารณาจากข้อสังเกตแล้ว เราจึงสามารถใช้คำว่า "ความเร่งสู่ศูนย์กลาง" ร่วมกับคำว่า "แรงเหวี่ยงหนีศูนย์กลาง" ได้
การปรับการแสดงออกของแรงโน้มถ่วงและแรงเหวี่ยงหนีศูนย์กลางด้วยการแทนที่ความเร่งสู่ศูนย์กลาง เราได้รับ:
m c ⋅ ω 2 ⋅ R = G ⋅ M 3 ⋅ m c R 2 (\displaystyle m_(c)\cdot \omega ^(2)\cdot R=G\cdot (\frac (M_(3)\cdot m_(c ))(R^(2)))).ลด m c (\displaystyle m_(c)), กำลังแปล R 2 (\displaystyle R^(2))ไปทางซ้ายและ ω 2 (\displaystyle \โอเมก้า ^(2))ทางด้านขวา เราได้รับ:
R 3 = G ⋅ M 3 ω 2 (\displaystyle R^(3)=G\cdot (\frac (M_(3))(\omega ^(2)))) R = G ⋅ M 3 ω 2 3 (\displaystyle R=(\sqrt[(3)](\frac (G\cdot M_(3))(\omega ^(2))))).คุณสามารถเขียนนิพจน์นี้แตกต่างออกไปโดยแทนที่ G ⋅ M 3 (\displaystyle G\cdot M_(3))บน µ (\displaystyle \mu )- ค่าคงตัวความโน้มถ่วงทางภูมิศาสตร์:
R = μ ω 2 3 (\displaystyle R=(\sqrt[(3)](\frac (\mu )(\omega ^(2)))))ความเร็วเชิงมุม ω (\displaystyle \โอเมก้า )คำนวณโดยการหารมุมที่เคลื่อนที่ในหนึ่งรอบ ( 360 ∘ = 2 ⋅ π (\displaystyle 360^(\circ )=2\cdot \pi )เรเดียน) ต่อระยะเวลาของการปฏิวัติ (เวลาที่ใช้ในการโคจรครบหนึ่งรอบ: หนึ่งวันดาราจักรหรือ 86,164 วินาที) เราได้รับ:
ω = 2 ⋅ π 86164 = 7 , 29 ⋅ 10 − 5 (\displaystyle \omega =(\frac (2\cdot \pi )(86164))=7.29\cdot 10^(-5)) rad/sรัศมีการโคจรที่เกิดขึ้นคือ 42,164 กม. การลบรัศมีเส้นศูนย์สูตรของโลกคือ 6,378 กม. ทำให้เราสูง 35,786 กม.
คุณสามารถทำการคำนวณด้วยวิธีอื่น ความสูงของวงโคจรค้างฟ้าคือระยะห่างจากศูนย์กลางของโลกที่ความเร็วเชิงมุมของดาวเทียมซึ่งเกิดขึ้นพร้อมกับความเร็วเชิงมุมของการหมุนของโลกทำให้เกิดความเร็วของวงโคจร (เชิงเส้น) เท่ากับความเร็วจักรวาลแรก (เพื่อให้แน่ใจว่า โคจรเป็นวงกลม) ที่ระดับความสูงที่กำหนด
ความเร็วเชิงเส้นของดาวเทียมเคลื่อนที่ด้วยความเร็วเชิงมุม ω (\displaystyle \โอเมก้า )ระยะทาง R (\displaystyle R)จากศูนย์กลางของการหมุนคือ
v l = ω ⋅ R (\displaystyle v_(l)=\omega \cdot R)ความเร็วอวกาศครั้งแรกในระยะไกล R (\displaystyle R)จากวัตถุมวล M (\รูปแบบการแสดงผล M)เท่ากับ
วี k = G M R ; (\displaystyle v_(k)=(\sqrt (G(\frac (M)(R))));)ให้สมการทางขวามือเท่ากัน เรามาถึงนิพจน์ที่ได้รับก่อนหน้านี้ รัศมีจีเอสโอ:
R = G M ω 2 3 (\displaystyle R=(\sqrt[(3)](G(\frac (M)(\omega ^(2))))))ความเร็วของวงโคจร
ความเร็วของการเคลื่อนที่ในวงโคจรค้างฟ้าคำนวณโดยการคูณความเร็วเชิงมุมด้วยรัศมีของวงโคจร:
v = ω ⋅ R = 3.07 (\displaystyle v=\omega \cdot R=3.07) กม./วินาทีซึ่งน้อยกว่าความเร็วจักรวาลแรกประมาณ 2.5 เท่า ซึ่งเท่ากับ 8 กม./วินาที ในวงโคจรใกล้โลก (มีรัศมี 6400 กม.) เนื่องจากกำลังสองของความเร็วสำหรับวงโคจรเป็นวงกลมแปรผกผันกับรัศมีของมัน
วี = G M R ; (\displaystyle v=(\sqrt (G(\frac (M)(R))));)จากนั้นความเร็วจะลดลงเมื่อเทียบกับความเร็วของอวกาศครั้งแรกโดยการเพิ่มรัศมีของวงโคจรมากกว่า 6 เท่า
R ≈ 6400 ∗ (8 3 , 07) 2 ≈ 43000 (\displaystyle R\ประมาณ \,\!(6400*((\frac (8)(3,07)))^(2))\ประมาณ \,\ !43000)ความยาวของวงโคจร
ความยาวของวงโคจรค้างฟ้า: 2 ⋅ π ⋅ R (\displaystyle (2\cdot \pi \cdot R)). ด้วยรัศมีวงโคจร 42,164 กม. เราได้ความยาววงโคจร 264,924 กม.
ความยาวของวงโคจรมีความสำคัญอย่างยิ่งในการคำนวณ "สถานี" ของดาวเทียม
การรักษาดาวเทียมให้อยู่ในตำแหน่งโคจรในวงโคจรค้างฟ้า
ดาวเทียมที่หมุนเวียนอยู่ในวงโคจรค้างฟ้าอยู่ภายใต้อิทธิพลของแรง (การรบกวน) จำนวนหนึ่งที่เปลี่ยนพารามิเตอร์ของวงโคจรนี้ โดยเฉพาะอย่างยิ่ง การก่อกวนดังกล่าวรวมถึงความโน้มถ่วงทางจันทรคติ - สุริยะรบกวน อิทธิพลของความไม่เท่าเทียมกันของสนามโน้มถ่วงของโลก ความรีของเส้นศูนย์สูตร ฯลฯ ความเสื่อมโทรมของวงโคจรแสดงออกเป็นสองปรากฏการณ์หลัก:
1) ดาวเทียมเคลื่อนที่ไปตามวงโคจรจากตำแหน่งโคจรเดิมไปยังจุดสมดุลคงที่หนึ่งในสี่จุดที่เรียกว่า "หลุมที่อาจโคจรอยู่ในวงโคจร" (ลองจิจูดคือ 75.3°E, 104.7°W, 165.3°E และ 14.7°W) เหนือเส้นศูนย์สูตรของโลก
2) ความเอียงของวงโคจรไปยังเส้นศูนย์สูตรเพิ่มขึ้น (จากเดิม 0) ในอัตราประมาณ 0.85 องศาต่อปีและถึงค่าสูงสุด 15 องศาใน 26.5 ปี
เพื่อชดเชยสิ่งรบกวนเหล่านี้และรักษาดาวเทียมไว้ที่ตำแหน่งที่กำหนด ดาวเทียมได้ติดตั้งระบบขับเคลื่อน (จรวดเคมีหรือไฟฟ้า) การเปิดเครื่องขับดันเป็นระยะ (แก้ไข "เหนือ-ใต้" เพื่อชดเชยความเอียงของวงโคจรและ "ตะวันตก-ตะวันออก" เพื่อชดเชยการล่องลอยไปตามวงโคจร) ทำให้ดาวเทียมอยู่ในตำแหน่งที่กำหนด การรวมดังกล่าวเกิดขึ้นหลายครั้งในหลายๆ (10-15) วัน เป็นสิ่งสำคัญที่การแก้ไขเหนือ-ใต้ต้องการการเพิ่มความเร็วของคุณลักษณะ (ประมาณ 45-50 ม./วินาทีต่อปี) ที่มากขึ้นกว่าการแก้ไขตามยาว (ประมาณ 2 ม./วินาทีต่อปี) เพื่อให้แน่ใจว่ามีการแก้ไขวงโคจรของดาวเทียมตลอดระยะเวลาการทำงาน (12-15 ปีสำหรับดาวเทียมโทรทัศน์สมัยใหม่) จำเป็นต้องมีการจัดหาเชื้อเพลิงจำนวนมากบนเรือ (หลายร้อยกิโลกรัม ในกรณีของเครื่องยนต์เคมี) เครื่องยนต์จรวดเคมีของดาวเทียมมีการจ่ายเชื้อเพลิงแบบเคลื่อนที่เป็นบวก (เพิ่มแก๊ส-ฮีเลียม) ทำงานบนส่วนประกอบที่มีจุดเดือดสูงในระยะยาว ดาวเทียมจำนวนหนึ่งติดตั้งเครื่องพลาสม่า แรงขับของพวกมันน้อยกว่าเมื่อเทียบกับสารเคมีอย่างมีนัยสำคัญ แต่ประสิทธิภาพที่มากขึ้นทำให้เป็นไปได้ (เนื่องจากการทำงานระยะยาว วัดเป็นสิบนาทีสำหรับการซ้อมรบครั้งเดียว) เพื่อลดมวลเชื้อเพลิงที่ต้องการบนเรืออย่างรุนแรง การเลือกประเภทของระบบขับเคลื่อนจะพิจารณาจากคุณสมบัติทางเทคนิคเฉพาะของอุปกรณ์
หากจำเป็น ระบบจะใช้ระบบขับเคลื่อนเดียวกันเพื่อเคลื่อนดาวเทียมไปยังตำแหน่งวงโคจรอื่น ในบางกรณี โดยปกติเมื่อสิ้นสุดอายุการใช้งานของดาวเทียม เพื่อลดการสิ้นเปลืองน้ำมันเชื้อเพลิง การแก้ไขวงโคจรเหนือ-ใต้จะหยุด และเชื้อเพลิงที่เหลือจะใช้สำหรับการแก้ไขทิศตะวันตก - ตะวันออกเท่านั้น
ความจุเชื้อเพลิงเป็นปัจจัยจำกัดหลักในอายุการใช้งานของดาวเทียมในวงโคจรค้างฟ้า
ข้อเสียของวงโคจรค้างฟ้า
สัญญาณล่าช้า
การสื่อสารผ่านดาวเทียม geostationary มีความล่าช้าอย่างมากในการแพร่กระจายสัญญาณ ด้วยระดับความสูงของวงโคจรที่ 35,786 กม. และความเร็วของแสงประมาณ 300,000 กม./วินาที เส้นทางของลำแสง Earth-Satellite ต้องใช้เวลาประมาณ 0.12 วินาที เส้นทางลำแสง "Earth (เครื่องส่ง) → ดาวเทียม → Earth (เครื่องรับ)" ≈0.24 วิ เวลาแฝงทั้งหมด (วัดโดยยูทิลิตี้ Ping) เมื่อใช้การสื่อสารผ่านดาวเทียมเพื่อรับและส่งข้อมูลจะเกือบครึ่งวินาที โดยคำนึงถึงความล่าช้าของสัญญาณในอุปกรณ์ดาวเทียม ในอุปกรณ์ และในระบบส่งสัญญาณเคเบิลของบริการภาคพื้นดิน ความล่าช้าของสัญญาณทั้งหมดตามเส้นทาง “แหล่งสัญญาณ → ดาวเทียม → เครื่องรับ” อาจถึง 2-4 วินาที ความล่าช้าดังกล่าวทำให้ยากต่อการใช้ดาวเทียม GSO ในระบบโทรศัพท์ และทำให้ไม่สามารถใช้การสื่อสารผ่านดาวเทียมโดยใช้ GSO ในบริการแบบเรียลไทม์ต่างๆ ได้ (เช่น ในเกมออนไลน์)
GSO ล่องหนจากละติจูดสูง
เนื่องจากไม่สามารถมองเห็นวงโคจรของ geostationary จากละติจูดสูง (ประมาณจาก 81 °ถึงขั้วโลก) และที่ละติจูดที่สูงกว่า 75 °จะสังเกตได้ต่ำมากเหนือขอบฟ้า (ในสภาพจริงดาวเทียมจะถูกซ่อนโดยวัตถุและภูมิประเทศที่ยื่นออกมา) และ มองเห็นเพียงส่วนเล็ก ๆ ของวงโคจรเท่านั้น ( ดูตาราง) ดังนั้นการสื่อสารและการออกอากาศทางโทรทัศน์โดยใช้ GSO ในภูมิภาคละติจูดสูงของ Far North (อาร์กติก) และแอนตาร์กติกาจึงเป็นไปไม่ได้ ตัวอย่างเช่น นักสำรวจขั้วโลกชาวอเมริกันที่สถานี Amundsen-Scott เพื่อสื่อสารกับโลกภายนอก (โทรศัพท์, อินเทอร์เน็ต) ใช้สายเคเบิลใยแก้วนำแสงที่มีความยาว 1670 กิโลเมตรเพื่อตั้งอยู่ที่ละติจูด 75 ° S. สถานีฝรั่งเศส Concordia ซึ่งมองเห็นดาวเทียม geostationary ของอเมริกาหลายดวง (~ 60 °) แล้วส่วนที่มองเห็นได้ของวงโคจร (และตามจำนวนดาวเทียมที่ได้รับ) คือ 84% ของค่าสูงสุดที่เป็นไปได้ (เปิดและเครื่องส่งสัญญาณ ดาวเทียมอยู่ในแนวเดียวกับเสาอากาศรับ (ตำแหน่ง "ดวงอาทิตย์หลังดาวเทียม") ปรากฏการณ์นี้ยังมีอยู่ในวงโคจรอื่น ๆ แต่มันอยู่ในวงโคจรค้างฟ้าเมื่อดาวเทียม "อยู่กับที่" บนท้องฟ้าซึ่งมันปรากฏตัวขึ้น โดยเฉพาะอย่างยิ่งในละติจูดกลางของซีกโลกเหนือการรบกวนจากแสงอาทิตย์จะปรากฏในช่วงเวลาตั้งแต่วันที่ 22 กุมภาพันธ์ถึง 11 มีนาคมและตั้งแต่เดือนตุลาคมด้วยระยะเวลาสูงสุดไม่เกินสิบนาที .
การอ้างสิทธิ์ของรัฐเส้นศูนย์สูตรเหล่านี้ถูกปฏิเสธโดยขัดกับหลักการไม่จัดสรรพื้นที่รอบนอก ในคณะกรรมการสหประชาชาติว่าด้วยอวกาศ ถ้อยแถลงดังกล่าวได้รับการวิพากษ์วิจารณ์อย่างสมเหตุสมผล ประการแรกเราไม่สามารถเรียกร้องการจัดสรรอาณาเขตหรือพื้นที่ใด ๆ ที่อยู่ห่างจากอาณาเขตของรัฐที่เกี่ยวข้องอย่างมีนัยสำคัญ ประการที่สอง พื้นที่รอบนอกไม่อยู่ภายใต้การจัดสรรของชาติ ประการที่สาม มันไร้ความสามารถทางเทคนิคที่จะพูดคุยเกี่ยวกับความสัมพันธ์ทางกายภาพระหว่างอาณาเขตของรัฐกับพื้นที่ห่างไกลของพื้นที่ ในที่สุด ในแต่ละกรณี ปรากฏการณ์ของดาวเทียมค้างฟ้าจะสัมพันธ์กับวัตถุอวกาศที่เฉพาะเจาะจง หากไม่มีดาวเทียม แสดงว่าไม่มีวงโคจรค้างฟ้า
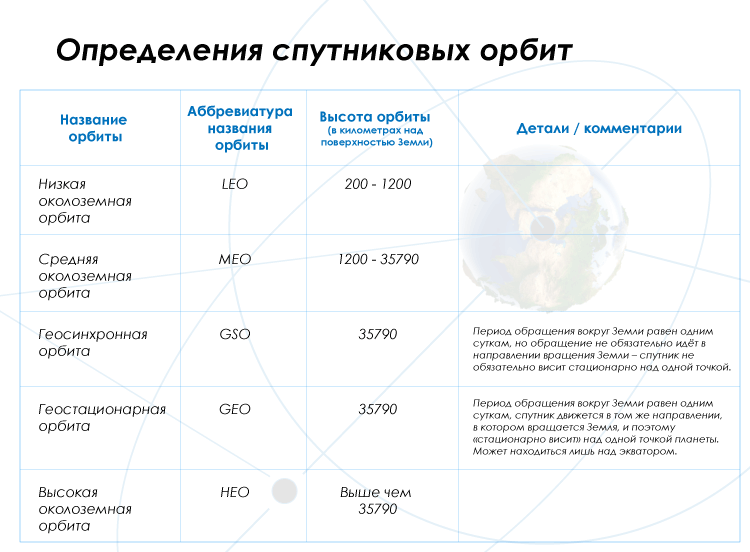
ทุกวันนี้ มนุษยชาติใช้วงโคจรที่แตกต่างกันหลายวงเพื่อรองรับดาวเทียม ความสนใจสูงสุดอยู่ที่วงโคจรของ geostationary ซึ่งสามารถใช้สำหรับตำแหน่ง "คงที่" ของดาวเทียมบนจุดใดจุดหนึ่งบนโลก วงโคจรที่เลือกสำหรับการทำงานของดาวเทียมนั้นขึ้นอยู่กับวัตถุประสงค์ ตัวอย่างเช่น ดาวเทียมที่ใช้ในการออกอากาศรายการโทรทัศน์สดจะอยู่ในวงโคจรค้างฟ้า ดาวเทียมสื่อสารจำนวนมากยังอยู่ในวงโคจรค้างฟ้า ระบบดาวเทียมอื่นๆ โดยเฉพาะระบบที่ใช้สำหรับการสื่อสารระหว่างโทรศัพท์ผ่านดาวเทียม อยู่ในวงโคจรระดับต่ำ ในทำนองเดียวกัน ระบบดาวเทียมที่ใช้สำหรับระบบนำทาง เช่น Navstar หรือ Global Positioning System (GPS) ก็อยู่ในวงโคจรโลกที่ค่อนข้างต่ำเช่นกัน มีดาวเทียมดวงอื่นๆ อีกนับไม่ถ้วน ทั้งอุตุนิยมวิทยา การวิจัย และอื่นๆ และแต่ละคนจะได้รับ "ใบอนุญาตการลงทะเบียน" ในวงโคจรที่แน่นอนขึ้นอยู่กับวัตถุประสงค์
อ่าน:
วงโคจรเฉพาะที่เลือกสำหรับการทำงานของดาวเทียมนั้นขึ้นอยู่กับปัจจัยหลายประการ ซึ่งได้แก่ หน้าที่ของดาวเทียม เช่นเดียวกับอาณาเขตที่ดาวเทียมให้บริการ ในบางกรณี อาจเป็นวงโคจรโลกที่ต่ำมาก (LEO) ซึ่งอยู่ที่ระดับความสูงเพียง 160 กิโลเมตรเหนือพื้นโลก ในบางกรณี ดาวเทียมจะอยู่ที่ระดับความสูงมากกว่า 36,000 กิโลเมตรเหนือพื้นโลก นั่นคือ ในวงโคจรค้างฟ้า GEO ยิ่งไปกว่านั้น ดาวเทียมจำนวนหนึ่งไม่ได้ใช้วงโคจรเป็นวงกลม แต่เป็นวงรี
แรงโน้มถ่วงของโลกและวงโคจรของดาวเทียม
เมื่อดาวเทียมโคจรรอบโลก ดาวเทียมจะค่อยๆ เคลื่อนตัวออกจากวงโคจรเนื่องจากแรงโน้มถ่วงของโลก หากดาวเทียมไม่โคจร ดาวเทียมจะค่อยๆ ตกลงสู่พื้นโลกและเผาไหม้ในชั้นบรรยากาศชั้นบน อย่างไรก็ตาม การหมุนของดาวเทียมรอบโลกทำให้เกิดแรงผลักพวกมันออกจากโลกของเรา แต่ละวงโคจรมีความเร็วที่คำนวณได้ของมันเอง ซึ่งช่วยให้คุณสร้างสมดุลระหว่างแรงโน้มถ่วงของโลกและแรงเหวี่ยงหนีศูนย์กลาง ทำให้อุปกรณ์อยู่ในวงโคจรคงที่และป้องกันไม่ให้ขึ้นหรือสูญเสียระดับความสูง
เป็นที่ชัดเจนว่ายิ่งวงโคจรของดาวเทียมต่ำลงเท่าใด แรงโน้มถ่วงของโลกก็จะยิ่งส่งผลกระทบมากขึ้นเท่านั้น และต้องใช้ความเร็วมากขึ้นในการเอาชนะแรงนี้ ยิ่งระยะห่างจากพื้นผิวโลกถึงดาวเทียมมากเท่าใด ความเร็วที่ต่ำกว่านั้นก็จำเป็นต่อการรักษาให้ดาวเทียมอยู่ในวงโคจรคงที่ เครื่องมือที่โคจรอยู่เหนือพื้นผิวโลกประมาณ 160 กม. ต้องใช้ความเร็วประมาณ 28,164 กม./ชม. ซึ่งหมายความว่าดาวเทียมดังกล่าวจะโคจรรอบโลกในเวลาประมาณ 90 นาที ที่ระยะห่างจากพื้นผิวโลก 36,000 กม. ดาวเทียมต้องการความเร็วน้อยกว่า 11,266 กม./ชม. เล็กน้อยจึงจะอยู่ในวงโคจรถาวร ซึ่งทำให้ดาวเทียมดังกล่าวสามารถโคจรรอบโลกได้ในเวลาประมาณ 24 ชั่วโมง
คำจำกัดความของวงโคจรแบบวงกลมและวงรี
ดาวเทียมทุกดวงโคจรรอบโลกโดยใช้หนึ่งในสองประเภทของวงโคจรพื้นฐาน
- วงโคจรดาวเทียมแบบวงกลม: เมื่อยานอวกาศโคจรรอบโลกในวงโคจรเป็นวงกลม ระยะห่างเหนือพื้นผิวโลกจะเท่ากันเสมอ
- วงโคจรของดาวเทียมวงรี: การหมุนดาวเทียมในวงโคจรวงรีหมายถึงการเปลี่ยนระยะทางไปยังพื้นผิวโลกในช่วงเวลาต่างๆ ในวงโคจรเดียว
อ่าน:
วงโคจรดาวเทียม
มีคำจำกัดความที่แตกต่างกันมากมายที่เกี่ยวข้องกับวงโคจรดาวเทียมประเภทต่างๆ:
- ศูนย์กลางของโลก: เมื่อดาวเทียมโคจรรอบโลก - ในวงโคจรเป็นวงกลมหรือวงรี - วงโคจรของดาวเทียมก่อให้เกิดระนาบที่ผ่านจุดศูนย์ถ่วงของโลกหรือจุดศูนย์กลางของโลก
- ทิศทางการเคลื่อนที่รอบโลก: วิธีที่ดาวเทียมโคจรรอบโลกของเราสามารถแบ่งออกเป็นสองประเภทตามทิศทางของการกลับรายการ:
1. บูสเตอร์โคจร: การปฏิวัติของดาวเทียมรอบโลกเรียกว่าการเร่งความเร็วหากดาวเทียมหมุนไปในทิศทางเดียวกับที่โลกหมุน
2. วงโคจรถอยหลังเข้าคลอง: การปฏิวัติของดาวเทียมรอบโลกเรียกว่าถอยหลังเข้าคลองหากดาวเทียมหมุนไปในทิศทางตรงกันข้ามกับทิศทางการหมุนของโลก- วงโคจร:เส้นทางของวงโคจรของดาวเทียมคือจุดบนพื้นผิวโลกเมื่อบินผ่านดาวเทียมซึ่งอยู่เหนือศีรษะโดยตรงในกระบวนการโคจรรอบโลก แทร็กก่อตัวเป็นวงกลมซึ่งอยู่ตรงกลางซึ่งเป็นศูนย์กลางของโลก ควรสังเกตว่าดาวเทียม geostationary เป็นกรณีพิเศษเพราะอยู่เหนือจุดเดียวกันเหนือพื้นผิวโลกตลอดเวลา ซึ่งหมายความว่าวงโคจรของพวกมันประกอบด้วยจุดเดียวที่อยู่บนเส้นศูนย์สูตรของโลก นอกจากนี้ยังสามารถเสริมว่าเส้นทางของวงโคจรของดาวเทียมที่หมุนอยู่เหนือเส้นศูนย์สูตรอย่างเคร่งครัดทอดยาวไปตามเส้นศูนย์สูตรนี้
วงโคจรเหล่านี้มักมีลักษณะเฉพาะด้วยการเลื่อนไปทางทิศตะวันตกในเส้นทางการโคจรของดาวเทียมแต่ละดวงเมื่อโลกด้านล่างดาวเทียมหมุนไปทางทิศตะวันออก
- โหนดโคจร: เหล่านี้คือจุดที่รอยโคจรผ่านจากซีกโลกหนึ่งไปยังอีกซีกหนึ่ง สำหรับวงโคจรที่ไม่ใช่เส้นศูนย์สูตร มีโหนดสองโหนดดังนี้:
1. โหนดจากน้อยไปมาก: นี่คือโหนดที่รอยโคจรผ่านจากซีกโลกใต้ไปยังภาคเหนือ
2. โหนดจากมากไปน้อย: นี่คือโหนดที่รอยโคจรผ่านจากซีกโลกเหนือไปทางใต้- ความสูงของดาวเทียม: เมื่อคำนวณวงโคจรจำนวนมาก จำเป็นต้องคำนึงถึงความสูงของดาวเทียมเหนือศูนย์กลางของโลกด้วย ตัวบ่งชี้นี้รวมถึงระยะทางจากดาวเทียมไปยังพื้นผิวโลกบวกกับรัศมีของโลกของเรา ตามกฎแล้วถือว่าเท่ากับ 6370 กิโลเมตร
- ความเร็วของวงโคจร: สำหรับวงโคจรเป็นวงกลมจะเหมือนเดิมเสมอ อย่างไรก็ตาม ในกรณีของวงรีวงรี ทุกอย่างแตกต่างกัน: ความเร็วของดาวเทียมในวงโคจรเปลี่ยนแปลงไปตามตำแหน่งของมันในวงโคจรนี้ มันไปถึงระดับสูงสุดเมื่อเข้าใกล้โลกมากที่สุด โดยที่ดาวเทียมจะมีความขัดแย้งสูงสุดต่อแรงโน้มถ่วงของโลก และลดลงเหลือน้อยที่สุดเมื่อถึงจุดที่มีระยะห่างมากที่สุดจากโลก
- มุมปีน: มุมเงยของดาวเทียมคือมุมที่ดาวเทียมอยู่เหนือขอบฟ้า หากมุมมีขนาดเล็กเกินไป สัญญาณอาจถูกบล็อกโดยวัตถุใกล้เคียงถ้าเสาอากาศรับไม่สูงพอ อย่างไรก็ตาม สำหรับเสาอากาศที่อยู่เหนือสิ่งกีดขวาง ยังมีปัญหาในการรับสัญญาณจากดาวเทียมที่มีมุมสูงต่ำ เหตุผลก็คือว่าสัญญาณดาวเทียมนั้นต้องเดินทางในระยะทางที่ไกลกว่าผ่านชั้นบรรยากาศของโลกและส่งผลให้ต้องลดทอนลงมากขึ้น มุมเงยต่ำสุดที่อนุญาตสำหรับการรับสัญญาณที่น่าพอใจมากหรือน้อยถือเป็นมุมห้าองศา
- มุมเอียง: ไม่ใช่ทุกวงโคจรของดาวเทียมจะเป็นไปตามเส้นศูนย์สูตร - อันที่จริงวงโคจรของโลกที่ต่ำส่วนใหญ่ไม่เป็นไปตามเส้นนี้ ดังนั้นจึงจำเป็นต้องกำหนดมุมเอียงของวงโคจรดาวเทียม แผนภาพด้านล่างแสดงกระบวนการนี้
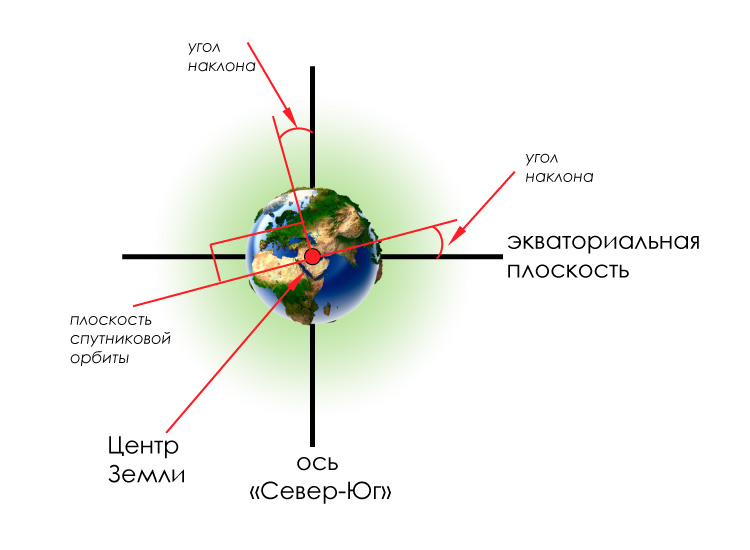 ความเอียงของวงโคจรดาวเทียม
ความเอียงของวงโคจรดาวเทียม ตัวชี้วัดอื่น ๆ ที่เกี่ยวข้องกับวงโคจรของดาวเทียม
เพื่อที่จะใช้ดาวเทียมเพื่อให้บริการด้านการสื่อสาร สถานีภาคพื้นดินจะต้องสามารถ "ตรวจสอบ" ดาวเทียมเพื่อรับสัญญาณจากดาวเทียมและส่งสัญญาณไปยังดาวเทียมได้ เป็นที่ชัดเจนว่าการสื่อสารกับดาวเทียมจะทำได้ก็ต่อเมื่ออยู่ในโซนการมองเห็นของสถานีภาคพื้นดินเท่านั้น และสามารถอยู่ในโซนการมองเห็นได้ในช่วงเวลาสั้นๆ เท่านั้น ทั้งนี้ขึ้นอยู่กับประเภทของวงโคจร เพื่อให้แน่ใจว่าสามารถสื่อสารกับดาวเทียมได้ในระยะเวลาสูงสุด มีหลายตัวเลือกที่สามารถใช้ได้:
- ตัวเลือกแรกประกอบด้วยการใช้วงโคจรรูปวงรี จุดสุดยอดซึ่งอยู่เหนือตำแหน่งที่วางแผนไว้ของสถานีภาคพื้นดิน ซึ่งช่วยให้ดาวเทียมอยู่ในมุมมองของสถานีนี้เป็นระยะเวลาสูงสุด
- ตัวเลือกที่สองประกอบด้วยการปล่อยดาวเทียมหลายดวงเข้าสู่วงโคจรเดียวกัน ดังนั้น ในเวลาที่ดาวเทียมดวงหนึ่งหายไปจากสายตาและการสื่อสารกับมันหายไป ดาวเทียมดวงอื่นเข้ามาแทนที่ ตามกฎแล้ว ในการจัดระเบียบการสื่อสารอย่างต่อเนื่องไม่มากก็น้อย จำเป็นต้องส่งดาวเทียมสามดวงขึ้นสู่วงโคจร อย่างไรก็ตาม กระบวนการในการเปลี่ยนดาวเทียม "หน้าที่" หนึ่งไปเป็นอีกดวงหนึ่งทำให้เกิดปัญหาเพิ่มเติมในระบบ รวมถึงข้อกำหนดจำนวนหนึ่งสำหรับดาวเทียมอย่างน้อยสามดวง
คำจำกัดความของวงโคจรแบบวงกลม
วงโคจรแบบวงกลมสามารถจำแนกได้ตามพารามิเตอร์ต่างๆ คำต่างๆ เช่น Low Earth Orbit, Geostationary Orbit (และอื่นๆที่คล้ายกัน) บ่งบอกถึงตัวตนของวงโคจรเฉพาะ ภาพรวมโดยย่อของคำจำกัดความของวงโคจรแบบวงกลมมีอยู่ในตารางด้านล่าง